
冲床吸盘机械手.pdf

Jo****34

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
冲床吸盘机械手.pdf
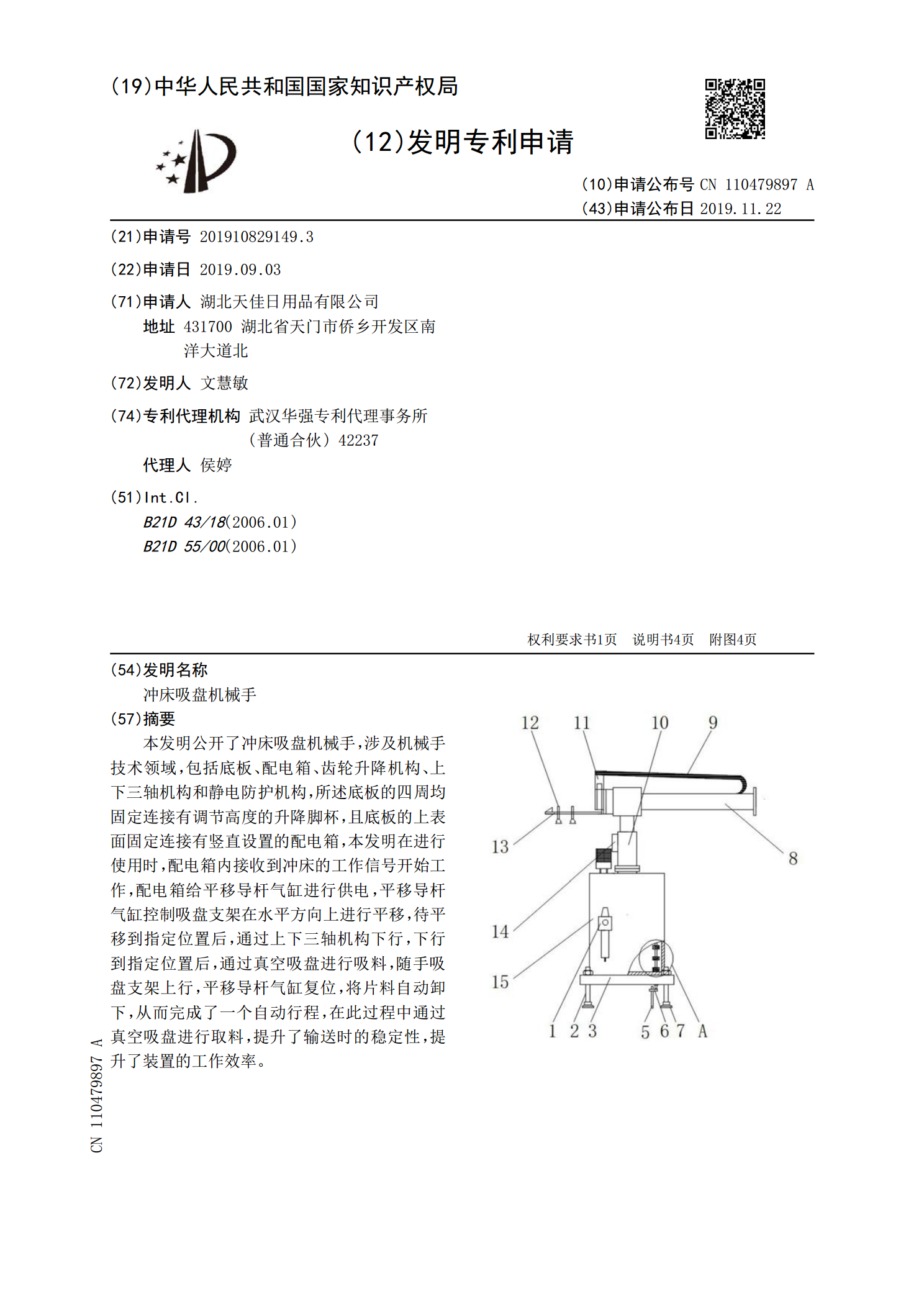
本发明公开了冲床吸盘机械手,涉及机械手技术领域,包括底板、配电箱、齿轮升降机构、上下三轴机构和静电防护机构,所述底板的四周均固定连接有调节高度的升降脚杯,且底板的上表面固定连接有竖直设置的配电箱,本发明在进行使用时,配电箱内接收到冲床的工作信号开始工作,配电箱给平移导杆气缸进行供电,平移导杆气缸控制吸盘支架在水平方向上进行平移,待平移到指定位置后,通过上下三轴机构下行,下行到指定位置后,通过真空吸盘进行吸料,随手吸盘支架上行,平移导杆气缸复位,将片料自动卸下,从而完成了一个自动行程,在此过程中通过真空吸盘

立式冲床吸盘式上下料机械手设计.docx
立式冲床吸盘式上下料机械手设计摘要:该立式机床吸盘式上下料机械手用于立式机床自动生产线的上下料装置专用机械手,完成工件从机械手工位到机床工作台的位置转换,其全部动作既可以自动完成,也可以单步手动控制完成,此机械手由手臂伸缩机构,手臂回转机构,中间座部机构,底座等部分组成,有三个自由度来满足生产要,既手臂伸缩运动,手臂水平回转及手臂升降运动。能够在较大范围内移动工件的同时,随意改变手爪位置和方向。其运动均采用液压方式驱动,其电气控制采用PLC进行控制,将全部工作按顺序用PLC编制控制电路,控制电路分为两部分

机械手电磁吸盘的设计.docx
机械手电磁吸盘的设计工作原理电磁吸盘是安装在手腕的前端,通过电磁吸力把工件吸住。其工作原理如图1所示,当线圈1通入电流后,在铁芯2内外激起磁场,由线圈出来的磁力经过铁芯、空气隙和被磁化的衔铁3而形成闭合回路。根据线圈中电流I的方向,可用右手螺旋法则来确定线圈的磁力线的方向,凡磁力线出来的那个磁极为N极,而磁力线进入的那个磁极为S极,同时衔铁3被磁化,其极性与铁芯线圈产生的磁场极性相反,根据异极性相吸的特性,衔铁受到电磁力F的作用,被吸向铁芯。有的电磁铁中衔铁是固定的,由靠近它的铁磁物质(即工件)被磁化形成

冲床智能机械手.pdf
本发明涉及一种冲床智能机械手,其中:所述的机械手水平运动机构采用步进电机和线型滚珠丝杆传动,机械手翻转运动机构采用步进电机和齿轮传动,由翻转主轴连接和驱动手臂翻转,且手臂上设有机械手水平运动机构一同翻转;所述的机械手摆臂运动结构采用伺服电机和行星减速机传动;所述的执行端旋转运动机构采用步进电机和同步轮传动,执行部件为真空吸盘,执行端旋转运动机构设置在水平运动机构的手臂上;所述的垂直运动机构采用步进电机、一对锥齿轮、滚珠丝杆和丝杆母套传动,且水平运动机构,翻转运动机构和执行端旋转运动机构均设置垂直运动机构的
冲床自动卸料机械手.pdf
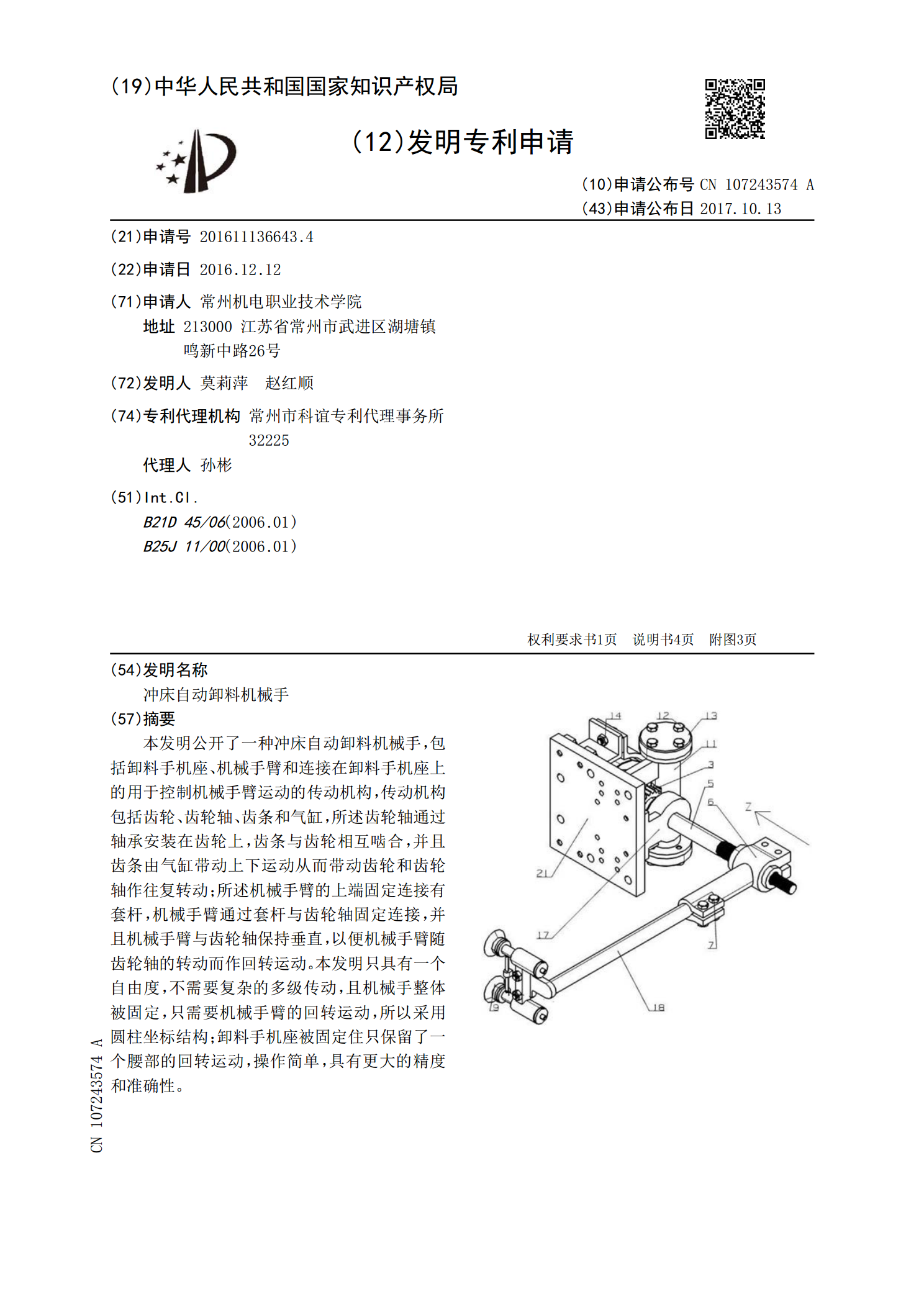
本发明公开了一种冲床自动卸料机械手,包括卸料手机座、机械手臂和连接在卸料手机座上的用于控制机械手臂运动的传动机构,传动机构包括齿轮、齿轮轴、齿条和气缸,所述齿轮轴通过轴承安装在齿轮上,齿条与齿轮相互啮合,并且齿条由气缸带动上下运动从而带动齿轮和齿轮轴作往复转动;所述机械手臂的上端固定连接有套杆,机械手臂通过套杆与齿轮轴固定连接,并且机械手臂与齿轮轴保持垂直,以便机械手臂随齿轮轴的转动而作回转运动。本发明只具有一个自由度,不需要复杂的多级传动,且机械手整体被固定,只需要机械手臂的回转运动,所以采用圆柱坐标结