
冲床自动卸料机械手.pdf

依波****bc

1/9

2/9

3/9

4/9
5/9

6/9
7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
冲床自动卸料机械手.pdf
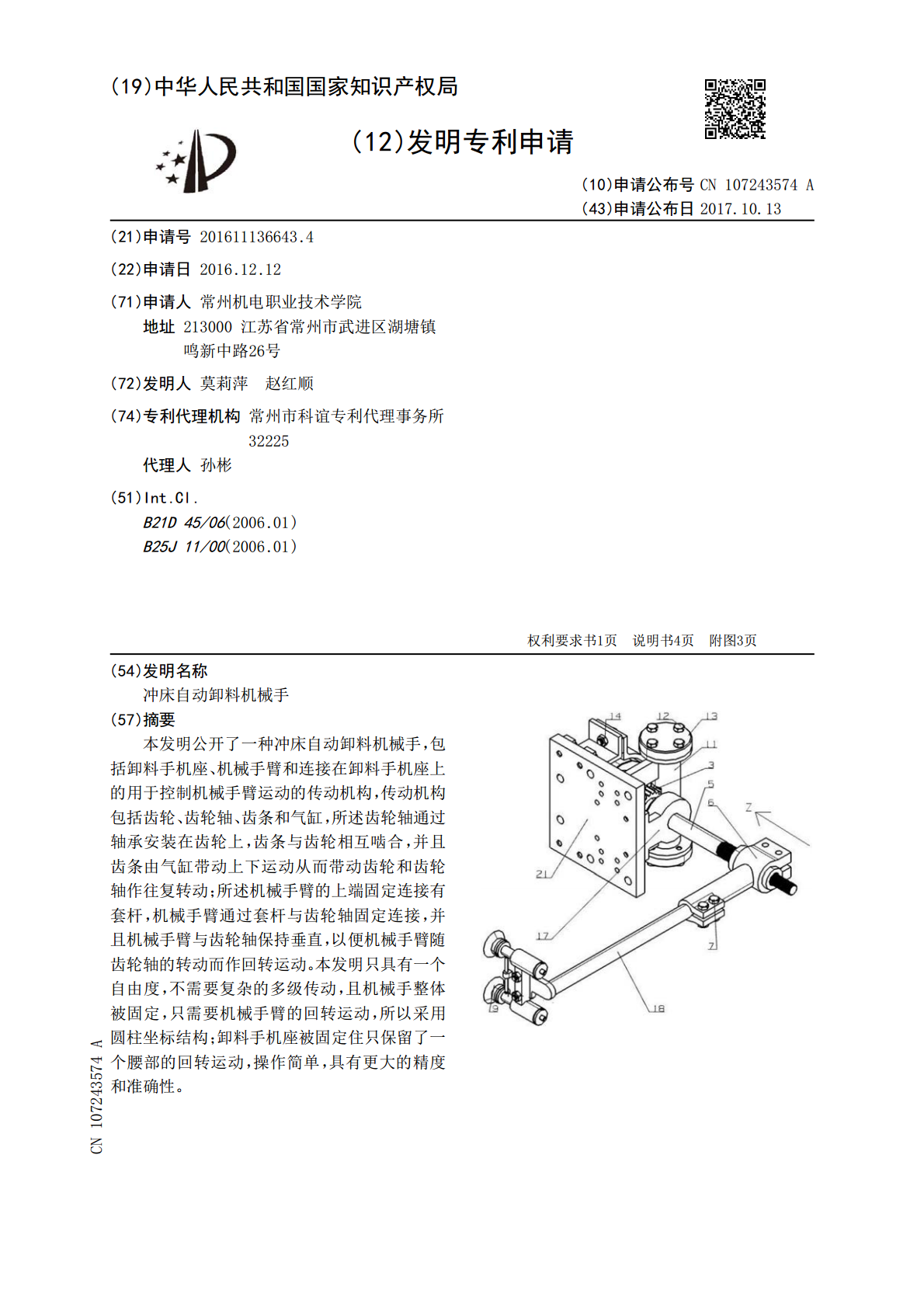
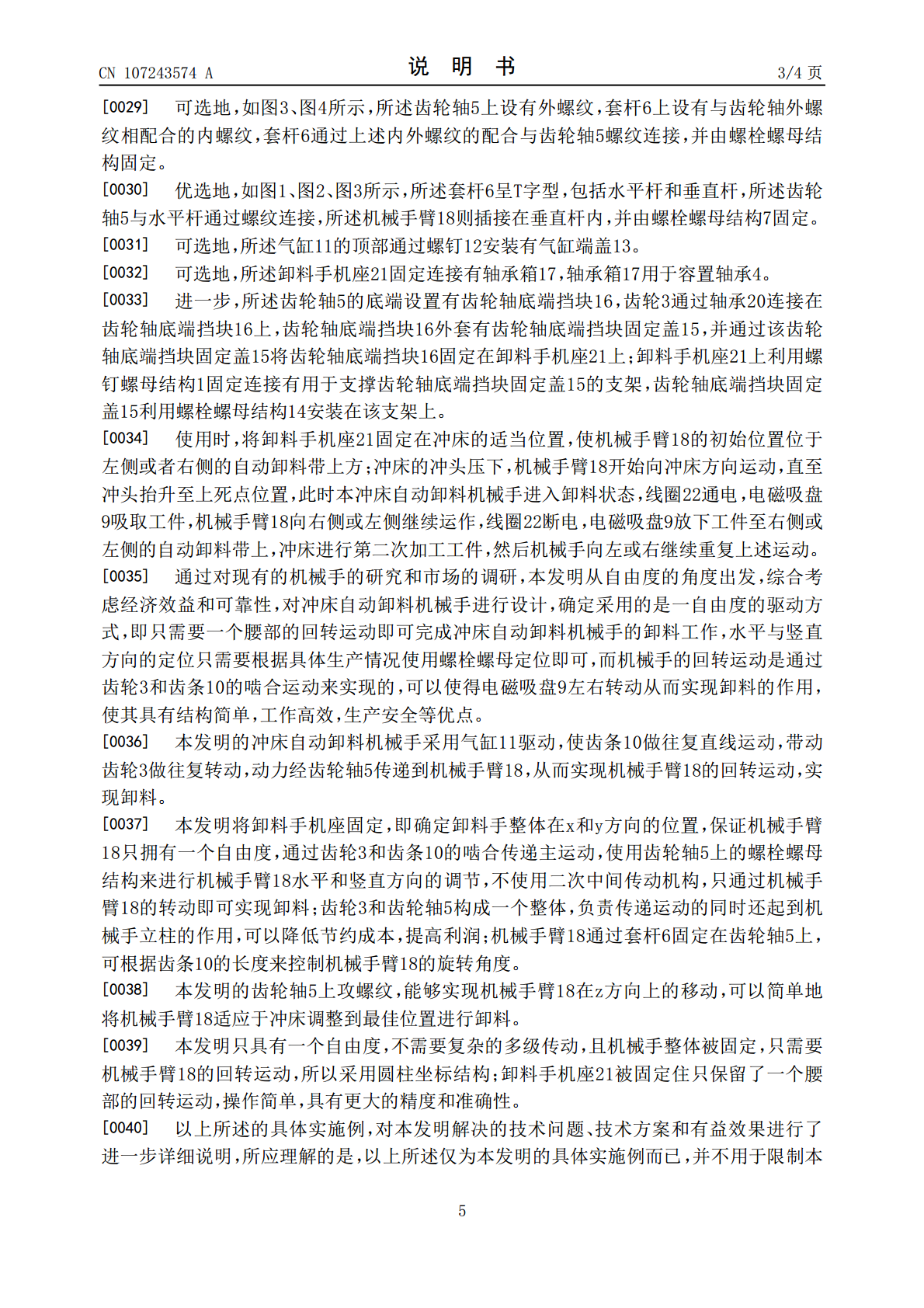
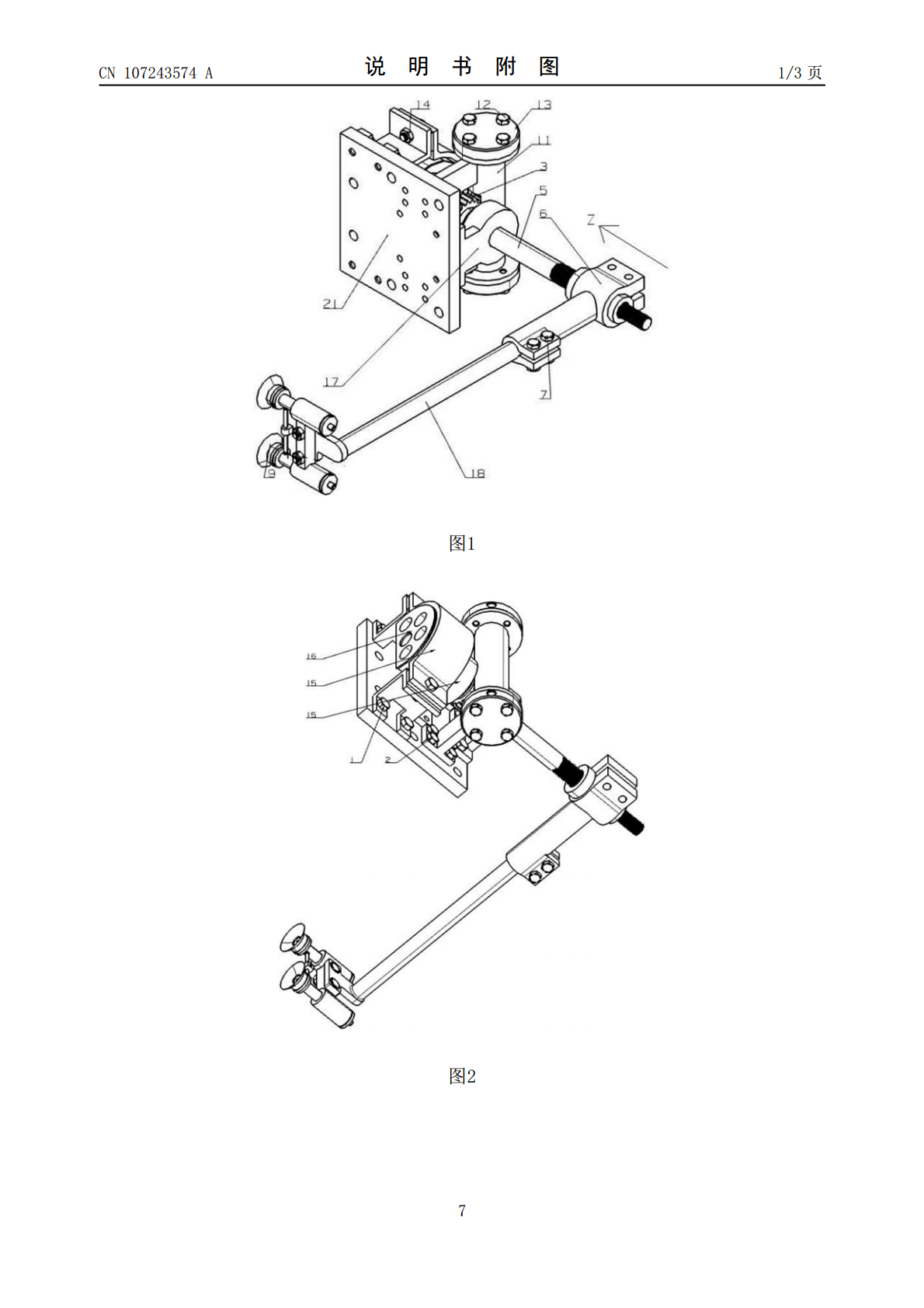
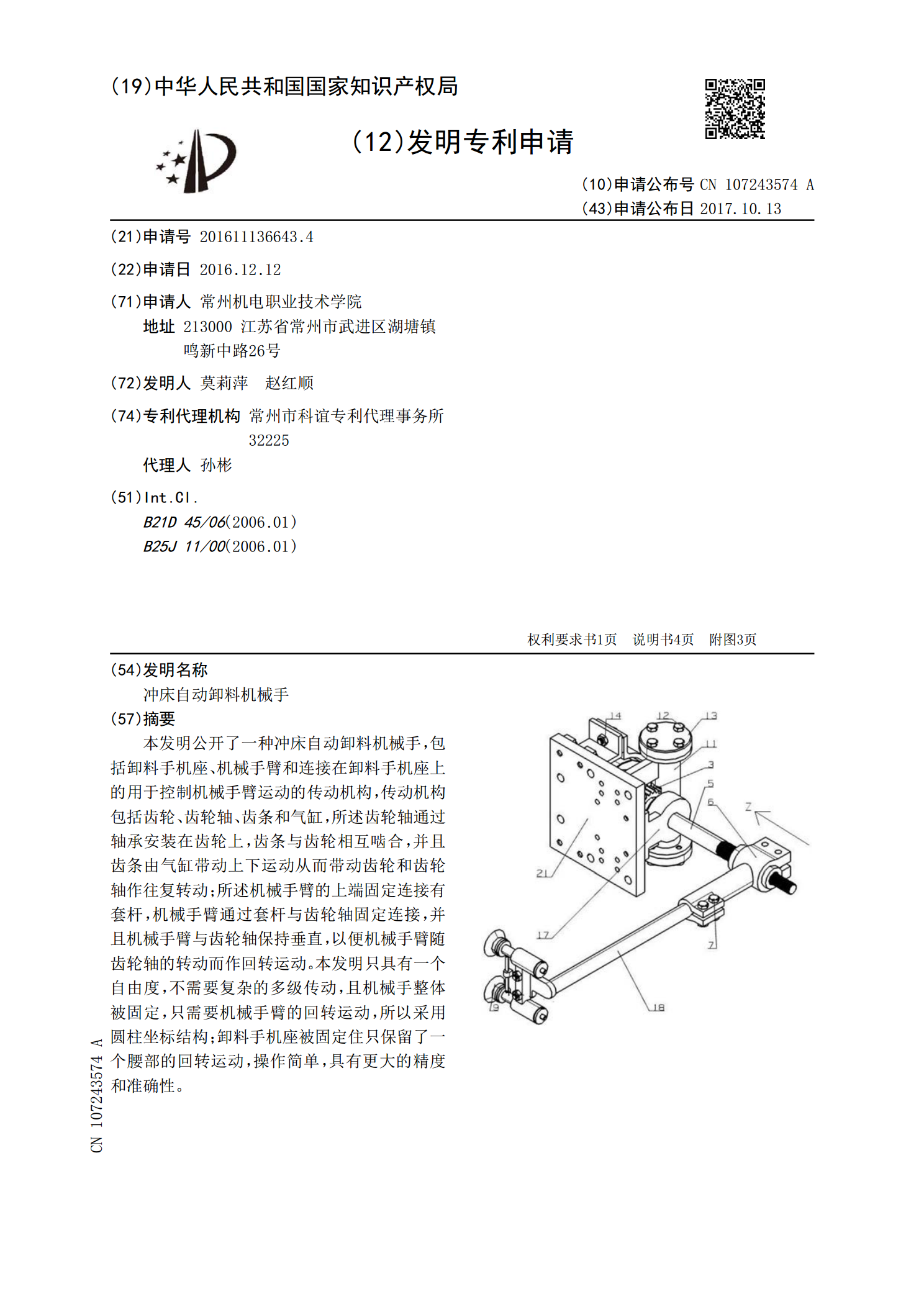
本发明公开了一种冲床自动卸料机械手,包括卸料手机座、机械手臂和连接在卸料手机座上的用于控制机械手臂运动的传动机构,传动机构包括齿轮、齿轮轴、齿条和气缸,所述齿轮轴通过轴承安装在齿轮上,齿条与齿轮相互啮合,并且齿条由气缸带动上下运动从而带动齿轮和齿轮轴作往复转动;所述机械手臂的上端固定连接有套杆,机械手臂通过套杆与齿轮轴固定连接,并且机械手臂与齿轮轴保持垂直,以便机械手臂随齿轮轴的转动而作回转运动。本发明只具有一个自由度,不需要复杂的多级传动,且机械手整体被固定,只需要机械手臂的回转运动,所以采用圆柱坐标结
冲床自动卸料装置.pdf
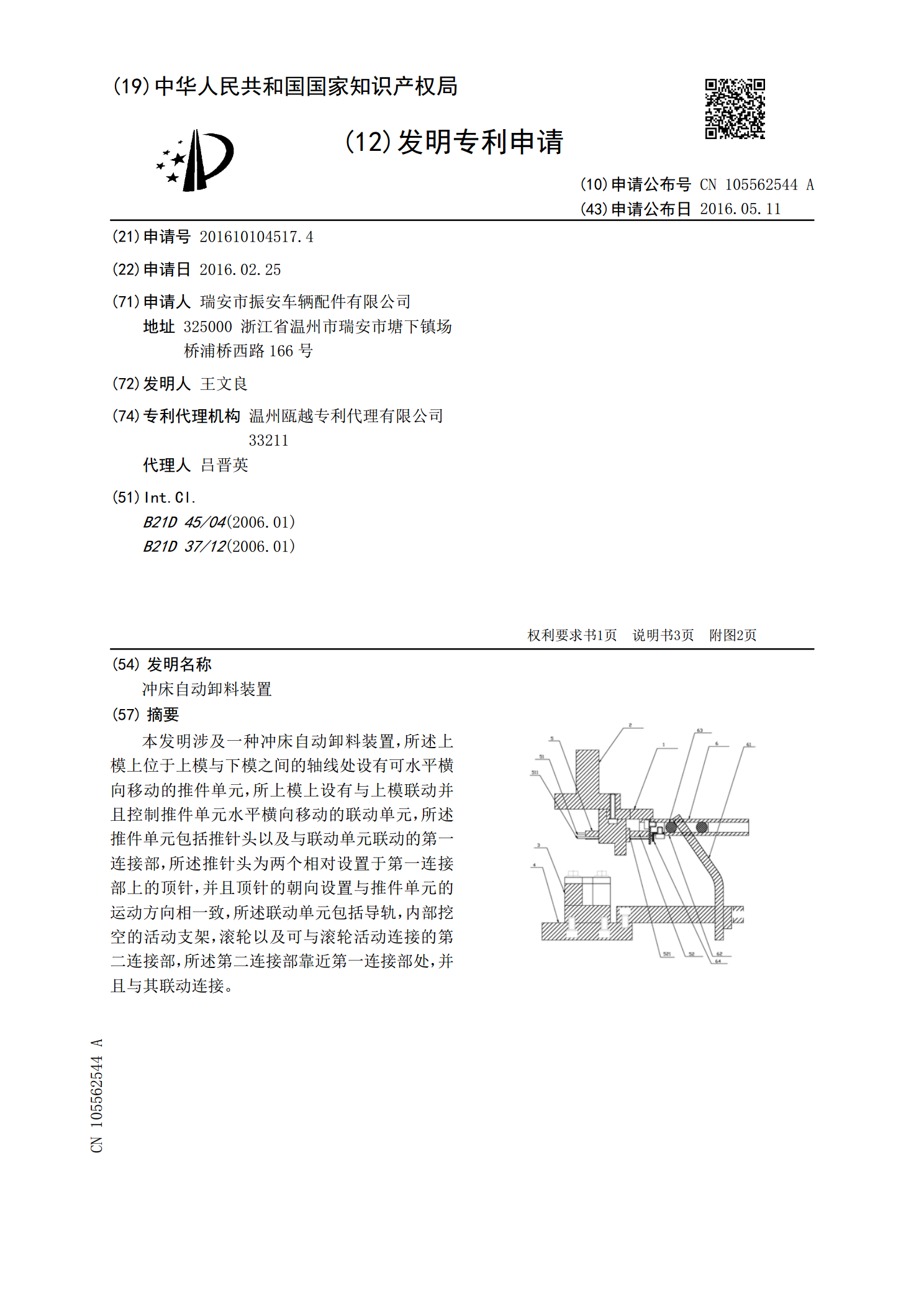
本发明涉及一种冲床自动卸料装置,所述上模上位于上模与下模之间的轴线处设有可水平横向移动的推件单元,所上模上设有与上模联动并且控制推件单元水平横向移动的联动单元,所述推件单元包括推针头以及与联动单元联动的第一连接部,所述推针头为两个相对设置于第一连接部上的顶针,并且顶针的朝向设置与推件单元的运动方向相一致,所述联动单元包括导轨,内部挖空的活动支架,滚轮以及可与滚轮活动连接的第二连接部,所述第二连接部靠近第一连接部处,并且与其联动连接。

冲床自动卸料装置.pdf
冲床自动卸料装置,应用于冲床的冲头上,包括凸轮和由凸轮驱动的摇杆,在摇杆的末端安装导料卸料座,所述导料卸料座套接在冲头上,并随着冲头运动,所述摇杆摆动的幅度带来的导料卸料座的线速度小于冲头的冲压后回收的速度。由于冲头冲压回收后的速度大于导料卸料座的提升速度,使冲头与导料卸料座之间产生相对位移,这样就可以使冲压后紧紧套在冲头上的坯料,由于受到导料卸料座的阻力而自动下落回模具的位置,也就可以保证每个工艺的顺利进行。
冲床自动上料机械手.pdf
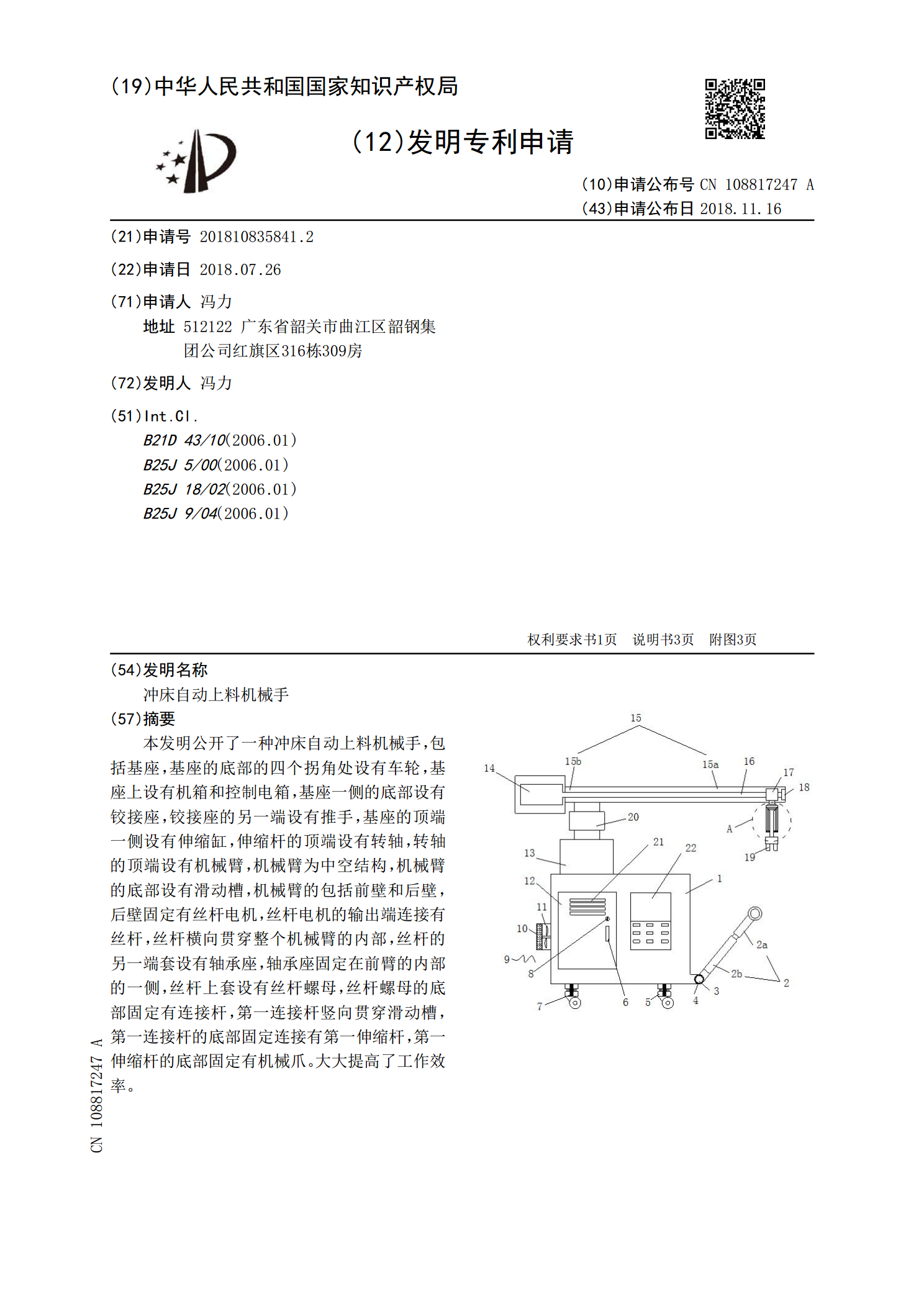
本发明公开了一种冲床自动上料机械手,包括基座,基座的底部的四个拐角处设有车轮,基座上设有机箱和控制电箱,基座一侧的底部设有铰接座,铰接座的另一端设有推手,基座的顶端一侧设有伸缩缸,伸缩杆的顶端设有转轴,转轴的顶端设有机械臂,机械臂为中空结构,机械臂的底部设有滑动槽,机械臂的包括前壁和后壁,后壁固定有丝杆电机,丝杆电机的输出端连接有丝杆,丝杆横向贯穿整个机械臂的内部,丝杆的另一端套设有轴承座,轴承座固定在前臂的内部的一侧,丝杆上套设有丝杆螺母,丝杆螺母的底部固定有连接杆,第一连接杆竖向贯穿滑动槽,第一连接杆
冲床自动上下料机械手.pdf
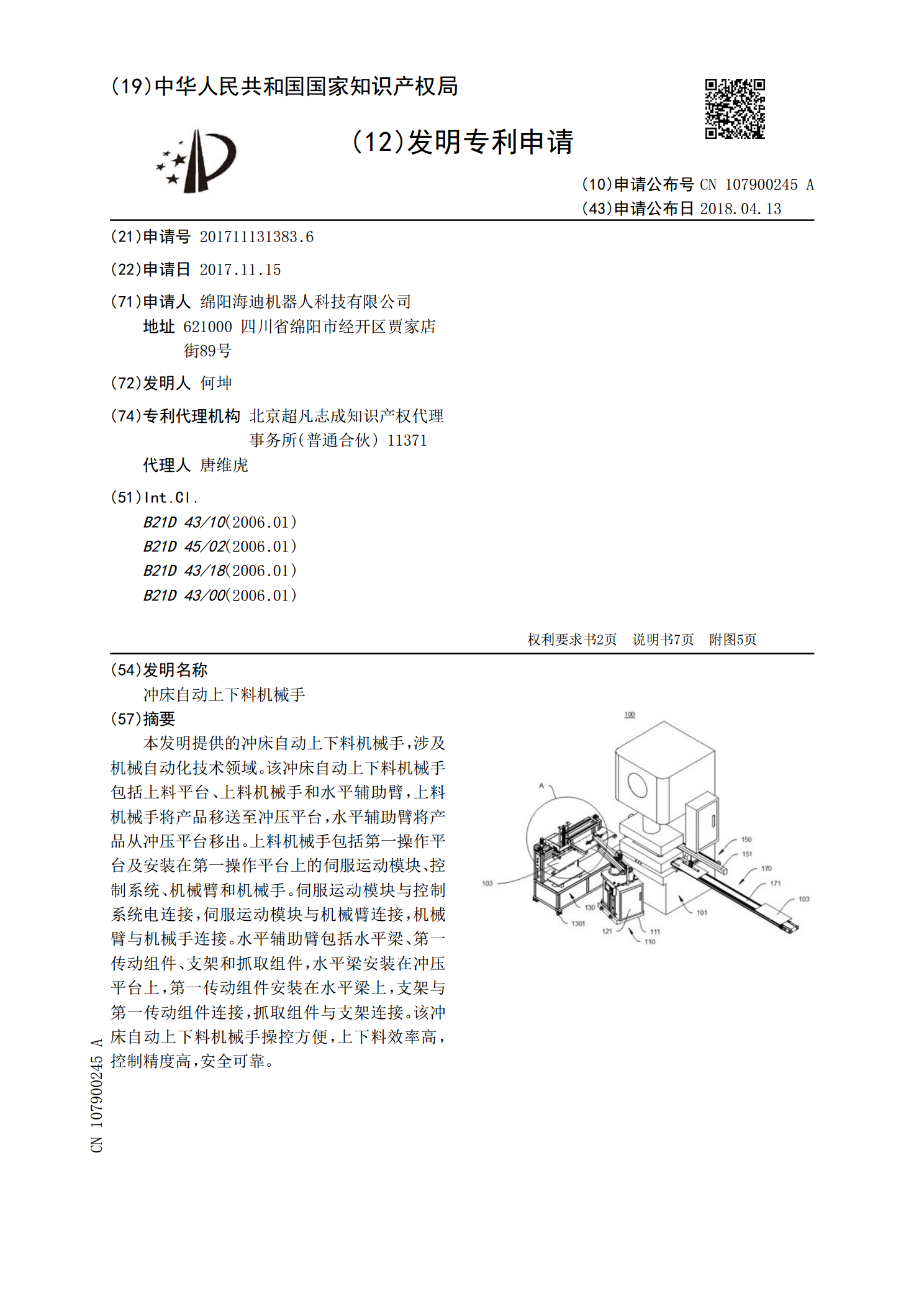
本发明提供的冲床自动上下料机械手,涉及机械自动化技术领域。该冲床自动上下料机械手包括上料平台、上料机械手和水平辅助臂,上料机械手将产品移送至冲压平台,水平辅助臂将产品从冲压平台移出。上料机械手包括第一操作平台及安装在第一操作平台上的伺服运动模块、控制系统、机械臂和机械手。伺服运动模块与控制系统电连接,伺服运动模块与机械臂连接,机械臂与机械手连接。水平辅助臂包括水平梁、第一传动组件、支架和抓取组件,水平梁安装在冲压平台上,第一传动组件安装在水平梁上,支架与第一传动组件连接,抓取组件与支架连接。该冲床自动上下