
高压输电线路机器人.pdf

An****99


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
高压输电线路机器人.pdf
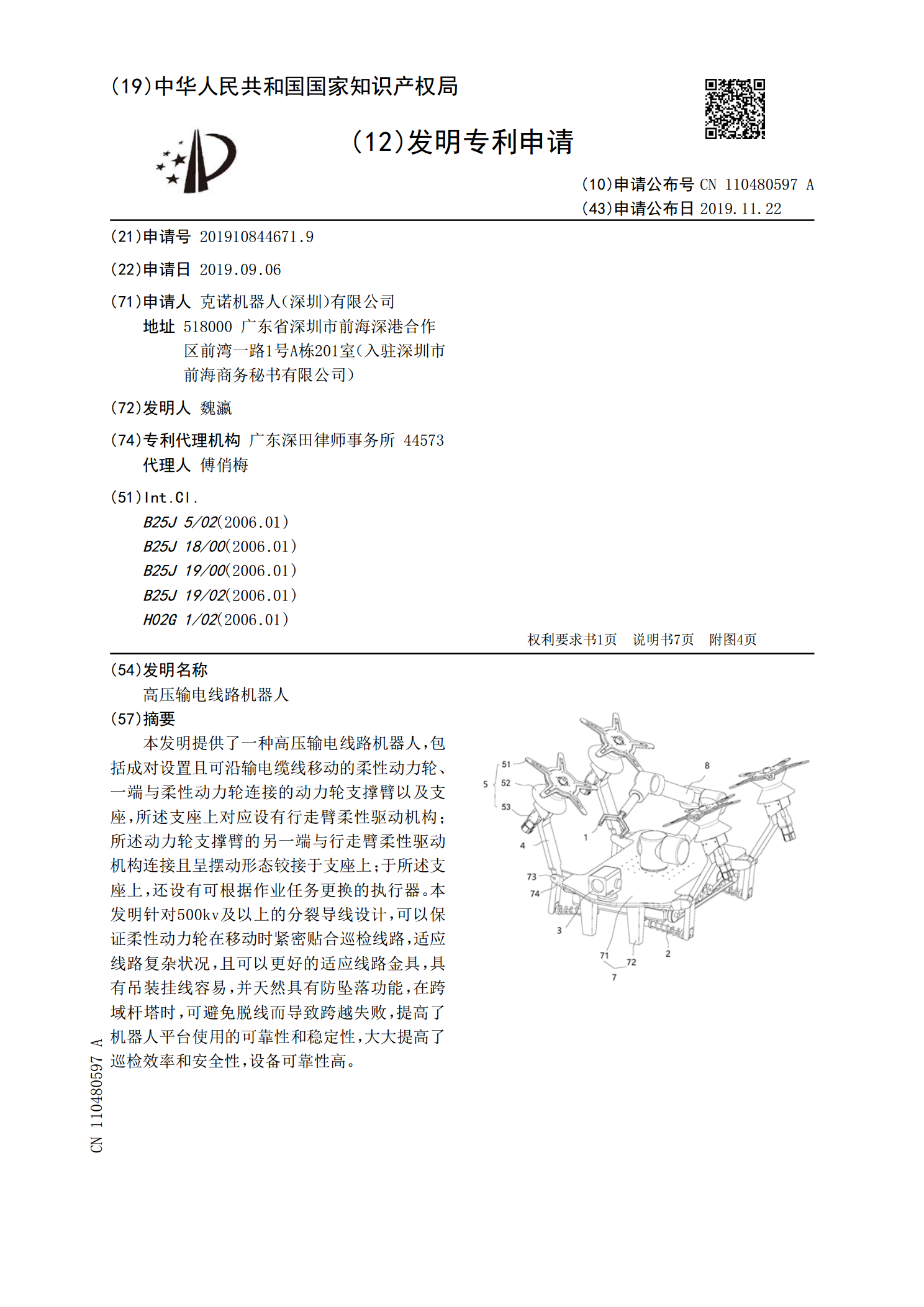
本发明提供了一种高压输电线路机器人,包括成对设置且可沿输电缆线移动的柔性动力轮、一端与柔性动力轮连接的动力轮支撑臂以及支座,所述支座上对应设有行走臂柔性驱动机构;所述动力轮支撑臂的另一端与行走臂柔性驱动机构连接且呈摆动形态铰接于支座上;于所述支座上,还设有可根据作业任务更换的执行器。本发明针对500kv及以上的分裂导线设计,可以保证柔性动力轮在移动时紧密贴合巡检线路,适应线路复杂状况,且可以更好的适应线路金具,具有吊装挂线容易,并天然具有防坠落功能,在跨域杆塔时,可避免脱线而导致跨越失败,提高了机器人平台

高压输电线路智能除冰机器人.pdf
本发明提供了一种高压输电线路智能除冰机器人,其特征在于,包括机体与安装在机体上的挂线机构、行走驱动机构、制动机构和除冰机构;所述的挂线机构包括轮架、安装在轮架上的3个共面的同时起到挂线作用的行走轮、L形进线槽、托线机构和安装于托线机构顶端的4个共面的托线轮、用于调节托线机构上下位置的杠杆机构;所述的制动机构由抱刹夹爪、用于夹爪复位的回位弹簧以及用于驱动夹爪开合的电动推杆组成;所述的除冰机构包括除冰电机、凸轮、破冰钢刀、滑块、拉紧弹簧、用于固定破冰钢刀的支撑圆盘;本发明的高压输电线路智能除冰机器人结构简单可

高压输电线路自主巡检机器人的研究.docx
高压输电线路自主巡检机器人的研究一、概述1.研究背景与意义随着社会的快速发展和经济的持续增长,我国电力需求呈现出逐年递增的趋势。高压输电线路作为电力系统的核心组成部分,其安全稳定运行对于保障国家能源安全、满足人民生产生活需求具有重要意义。高压输电线路分布广泛、环境复杂,且常常面临恶劣天气、自然灾害等不可预测因素的挑战,导致线路故障频发,给电力系统的稳定运行带来了极大的隐患。传统的巡检方式主要依赖于人工巡视和简单的检测工具,这种方式不仅效率低下,而且难以覆盖所有线路段,尤其是在复杂和恶劣环境下,巡检人员的安

沿架空高压输电线路自动除冰的机器人.pdf
一种沿架空高压输电线路自动除冰的机器人,它包括大臂伸缩机构、两伸缩机械手机构、行走轮机构和夹紧机构,两伸缩机械手机构下端与大臂伸缩机构两端的转动机构连接,除冰机构设于伸缩机械手机构的顶端,伸缩机械手机构可围绕铅垂轴转动,由行走轮和行走轮驱动机构组成,行走轮驱动机构与伸缩机械手机构的上端连接,夹紧机构与伸缩机械手机构连接,夹紧机构可随着伸缩机械手机构的伸缩夹紧/松开输电线。本发明提供的沿架空高压输电线路自动除冰的机器人,能清除输电线路上的覆冰,越障能力强,不需人工带电将其从障碍物的一侧搬运到另一侧,安全可靠

一种高压输电线路除冰机器人.pdf
本发明公开了一种高压输电线路除冰机器人,除冰机器人由滑车及控制系统构成,控制器置于滑车内部,滑车由车体、悬挂臂、滑轮、除冰机构、动力系统、蓄电池及驱动机构构成,除冰机构由机架、除冰轮、除冰驱动机构及升降驱动机构构成,控制器由气压传感器、气温传感器、湿度传感器、风速传感器、降水量传感器、充放电控制器、GPS模块、驱动模块、双向可控硅模块、通讯模块、数据处理模块及数据存储模块构成。本发明可对输电线路温度、湿度及结冰状况进行全程监控,数据信息采集准确且全面,并自动进行除冰,且除冰过程采用热融化及物理切割同步进行