
整平机.pdf

是翠****ng


1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

整平机.pdf
本发明公开了一种整平机,包括:机架;整平装置,整平装置设在机架上;行走装置,行走装置包括:多个行走单元,每个行走单元均包括:车轮支架和设在车轮支架上的行走车轮,车轮支架可转动地连接在机架上,至少一个行走单元包括用于驱动行走车轮转动的行走驱动件;转向机构,转向机构设在机架上,转向机构包括:转向驱动件和转向连杆组件,转向连杆组件与多个行走单元的车轮支架相连,转向驱动件与转向连杆组件相连以驱动转向连杆组件活动。本发明通过多个行走单元和转向机构构成的行走装置,多个行走单元均可发生转向,从而使行走单元可以沿整平机的
整平机.pdf
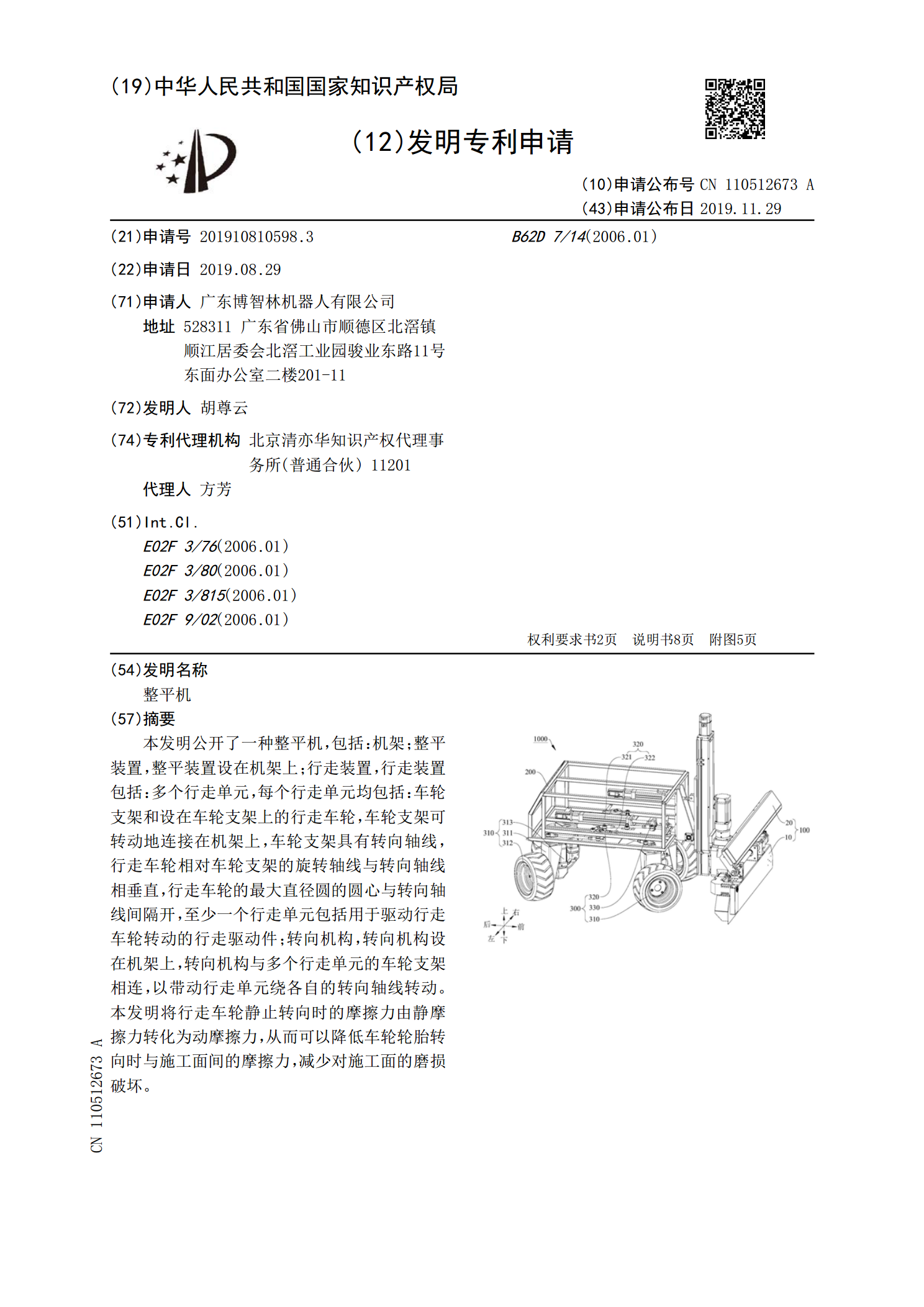
本发明公开了一种整平机,包括:机架;整平装置,整平装置设在机架上;行走装置,行走装置包括:多个行走单元,每个行走单元均包括:车轮支架和设在车轮支架上的行走车轮,车轮支架可转动地连接在机架上,车轮支架具有转向轴线,行走车轮相对车轮支架的旋转轴线与转向轴线相垂直,行走车轮的最大直径圆的圆心与转向轴线间隔开,至少一个行走单元包括用于驱动行走车轮转动的行走驱动件;转向机构,转向机构设在机架上,转向机构与多个行走单元的车轮支架相连,以带动行走单元绕各自的转向轴线转动。本发明将行走车轮静止转向时的摩擦力由静摩擦力转化

皮革整平机.pdf
本发明公开了一种皮革整平机,包括机箱(1),机箱(1)包括有电热箱(2)和底座(7),所述底座(7)上设置有内部中空的载物台(9),载物台(9)上端和侧壁均设有缺口,所述载物台(9)内部设有定位块(6),定位块(6)上端中部设有弧形凹槽,弧形凹槽内放置有滚轮(8),滚轮(8)圆周面正对且伸出载物台(9)上端缺口;所述电热箱(2)侧壁外端设有压杆(4),压杆(4)底端通过螺栓(5)连接有压头(10)且压头(10)正对滚轮(8)设置。本发明设计的这种皮革整平机,可极好的保护皮革,同时压头可拆卸,保护性和安全性

墙体整平机.pdf
本发明公开了一种墙体整平机,其包括整平机主体和整平刀,在整平机主体前面板的下部设有机电控制柜门;在整平机主体前面板上部设有控制面板;在整平机主体底部四角设有万向脚轮;在整平机主体后部设有活动伸出的推进机架;在推进机架上水平滑动设有平移机架;在平移机架上上下滑动设有整平刀座;在整平刀座上竖直设有整平刀;整平刀包括整平刀架和压光刀刃,整平刀架采用角钢制成,整平刀架的两个边端置于外侧,作为整平刀刃,在一个整平刀刃侧边设有压光刀刃。优点在于:结构简单,使用方便,易于维护,安装定位调节找平简易,抹灰均匀平整,自动完

钢材整平机.pdf
本发明公开了钢材整平机,电机(1)通过变速箱(2)连接齿轮箱(3),齿轮箱(3)通过连轴器(4)连接在机体(5)上;所述的机体(5)包括钢支架(6),钢支架(6)安装底座(8)上,下辊轴(9)安装在两侧的钢支架(6)上,连轴器(4)通过轴连接下辊轴(9),钢支架(6)上方安装液压泵(10),液压泵(10)的液压杆(15)上安装上辊轴(11),液压泵(10)通过油路管(12)构成液压回路。本发明结构简单,操作方便,相互配合的上辊轴和下辊轴挤压板材调节平整度,机械化作业,工作效率高。