
一种汽机超速保护系统及其控制方法.pdf

An****70


1/9
2/9

3/9
4/9
5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种汽机超速保护系统及其控制方法.pdf
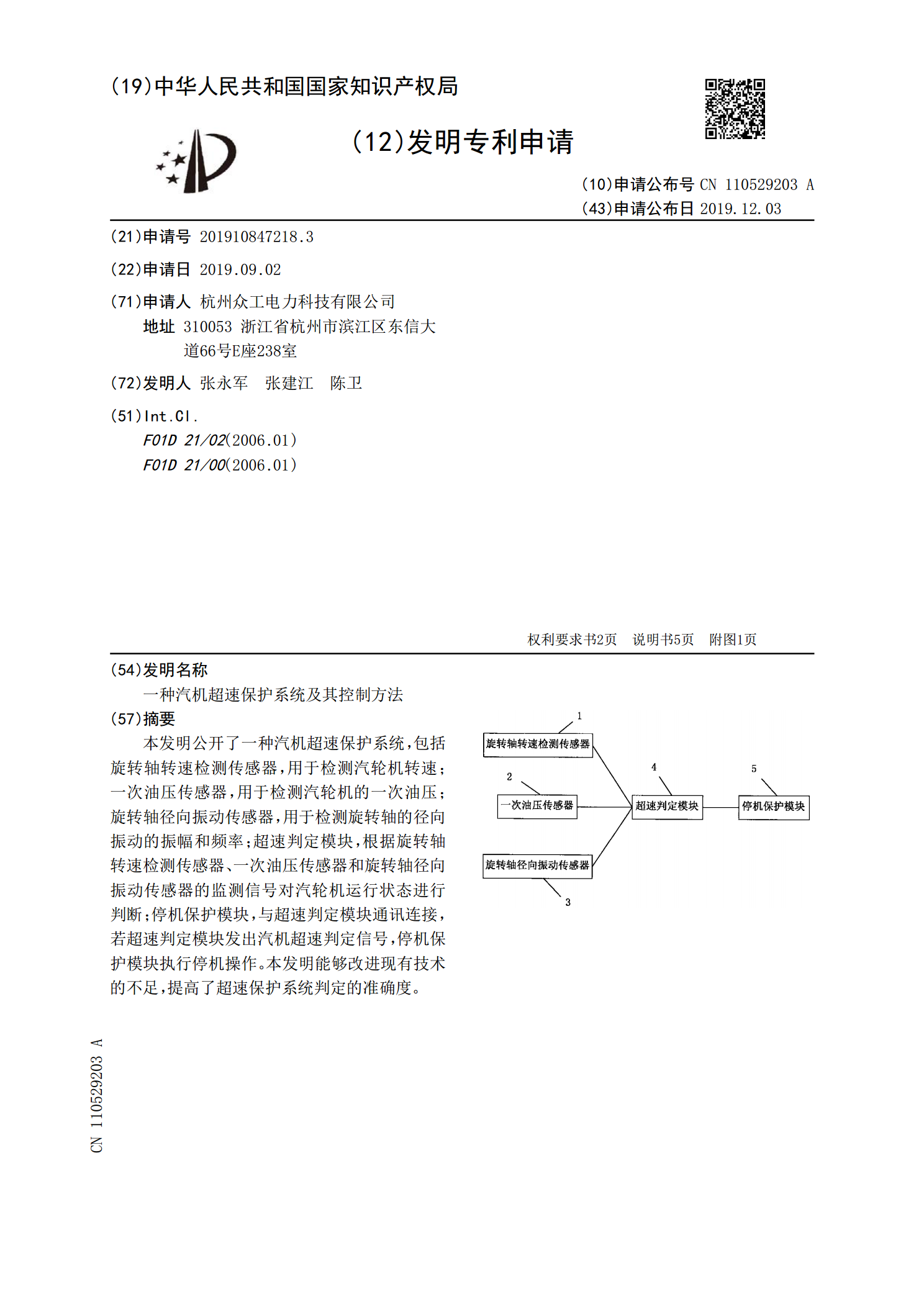
本发明公开了一种汽机超速保护系统,包括旋转轴转速检测传感器,用于检测汽轮机转速;一次油压传感器,用于检测汽轮机的一次油压;旋转轴径向振动传感器,用于检测旋转轴的径向振动的振幅和频率;超速判定模块,根据旋转轴转速检测传感器、一次油压传感器和旋转轴径向振动传感器的监测信号对汽轮机运行状态进行判断;停机保护模块,与超速判定模块通讯连接,若超速判定模块发出汽机超速判定信号,停机保护模块执行停机操作。本发明能够改进现有技术的不足,提高了超速保护系统判定的准确度。
一种降低超速危害的智控系统及其控制方法.pdf
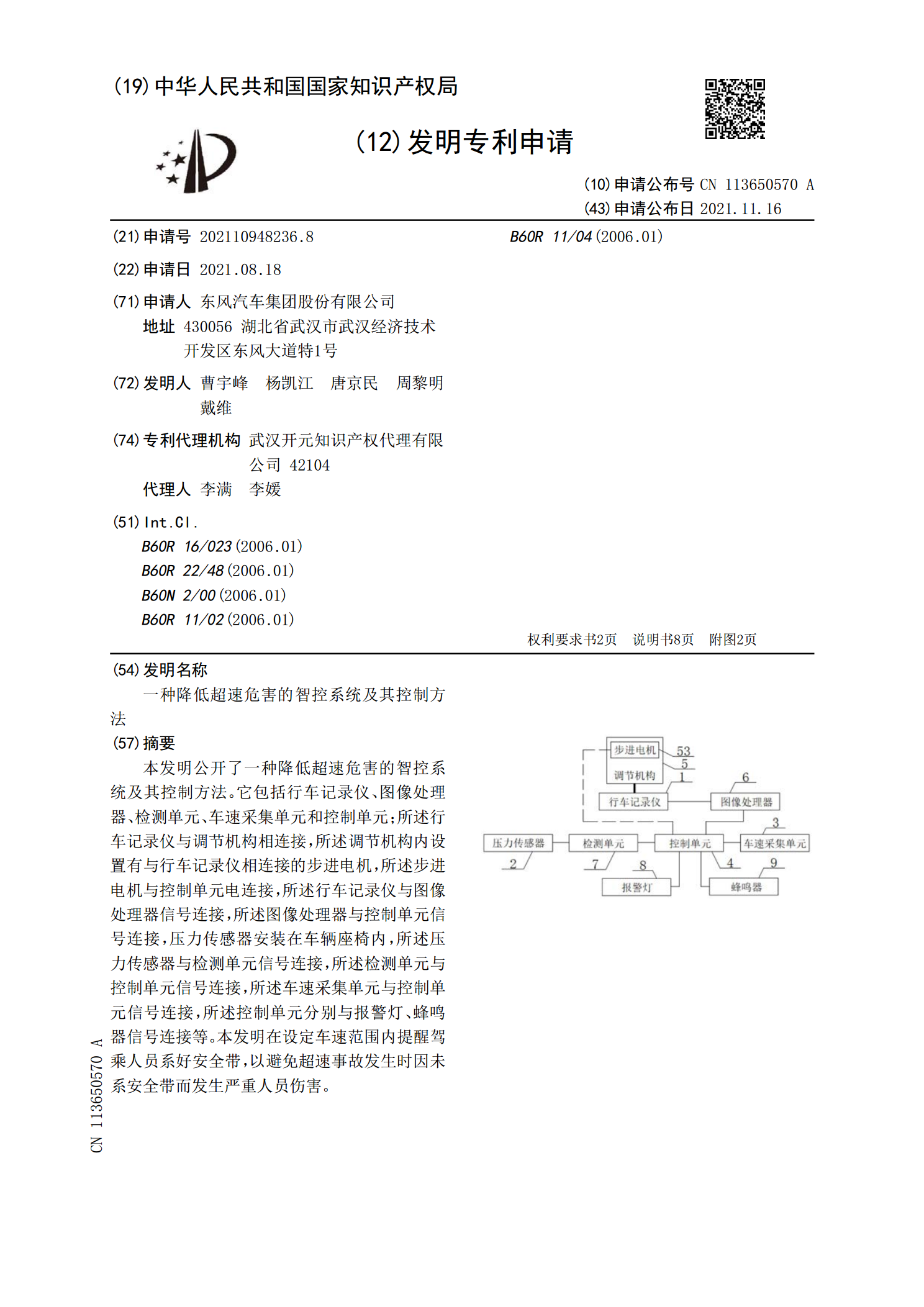
本发明公开了一种降低超速危害的智控系统及其控制方法。它包括行车记录仪、图像处理器、检测单元、车速采集单元和控制单元;所述行车记录仪与调节机构相连接,所述调节机构内设置有与行车记录仪相连接的步进电机,所述步进电机与控制单元电连接,所述行车记录仪与图像处理器信号连接,所述图像处理器与控制单元信号连接,压力传感器安装在车辆座椅内,所述压力传感器与检测单元信号连接,所述检测单元与控制单元信号连接,所述车速采集单元与控制单元信号连接,所述控制单元分别与报警灯、蜂鸣器信号连接等。本发明在设定车速范围内提醒驾乘人员系好
超速保护系统和方法.pdf
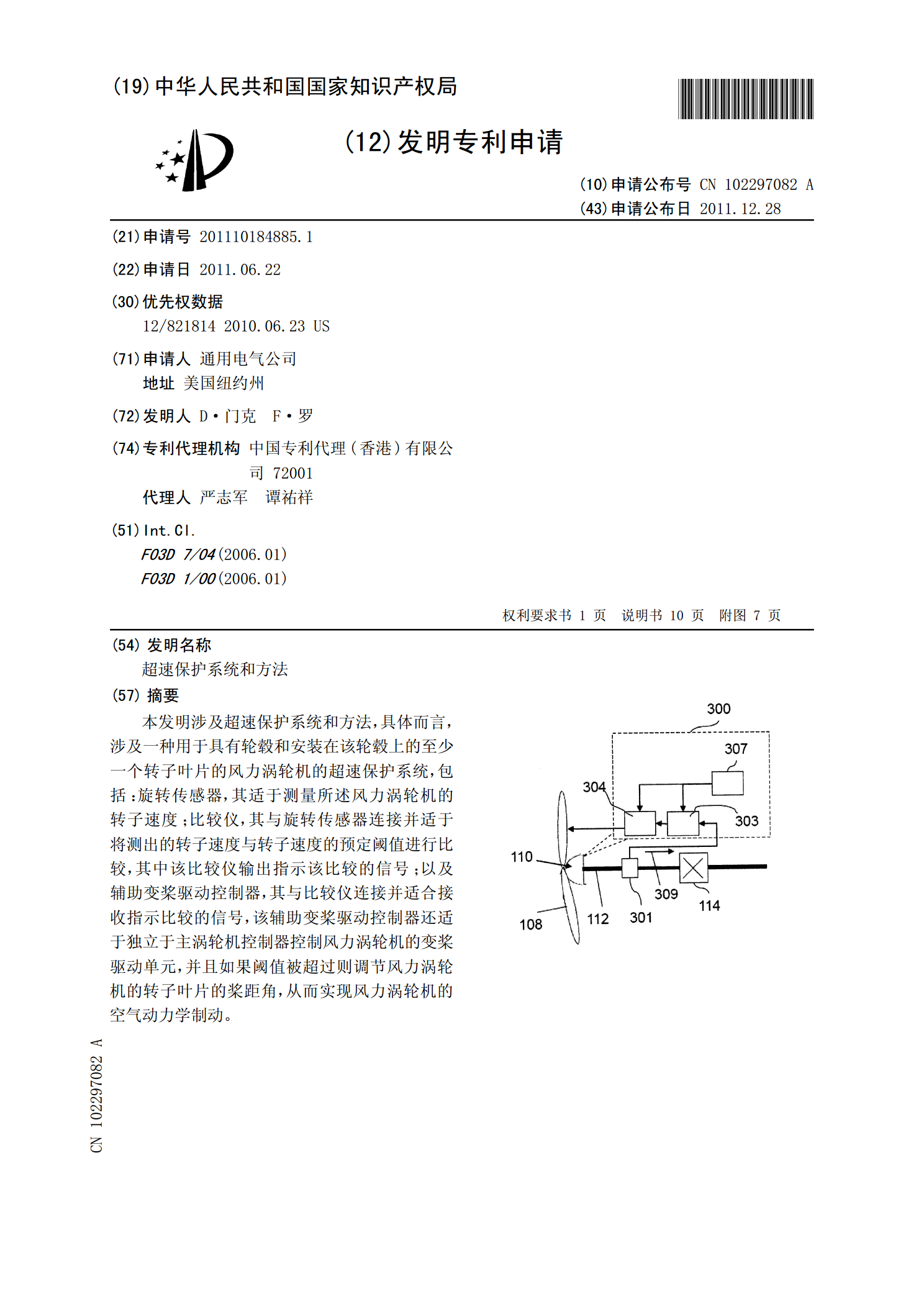
本发明涉及超速保护系统和方法,具体而言,涉及一种用于具有轮毂和安装在该轮毂上的至少一个转子叶片的风力涡轮机的超速保护系统,包括:旋转传感器,其适于测量所述风力涡轮机的转子速度;比较仪,其与旋转传感器连接并适于将测出的转子速度与转子速度的预定阈值进行比较,其中该比较仪输出指示该比较的信号;以及辅助变桨驱动控制器,其与比较仪连接并适合接收指示比较的信号,该辅助变桨驱动控制器还适于独立于主涡轮机控制器控制风力涡轮机的变桨驱动单元,并且如果阈值被超过则调节风力涡轮机的转子叶片的桨距角,从而实现风力涡轮机的空气动力

汽机保护和脱扣系统及其他压水堆控制保护和检测系统系统.pptx
会计学内容主蒸汽排放控制系统系统功能系统功能系统描述系统描述系统描述系统描述运行参数运行参数运行参数控制原理主蒸汽旁排控制逻辑图控制原理控制原理控制原理/控制原理/控制原理控制原理汽轮机保护和脱扣系统系统简介系统简介DEH控制系统操作方式DEH控制系统操作方式DEH控制系统操作方式DEH控制系统操作方式DEH控制系统操作方式DEH控制系统操作方式RUNBACK操作超速保护控制超速保护控制超速保护控制超速保护控制超速保护控制超速保护控制危急遮断系统
一种柴油机超速保护控制方法.pdf
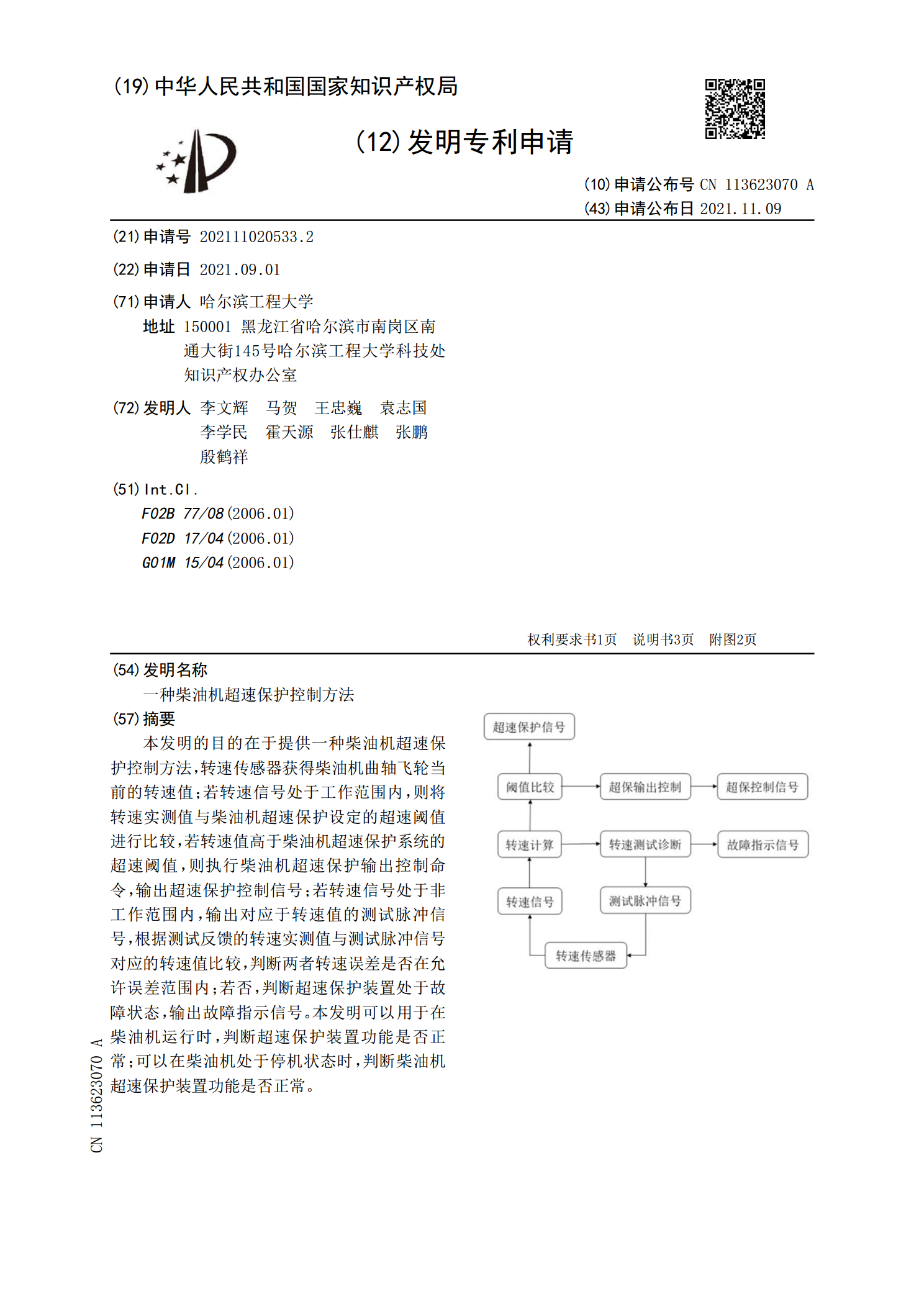
本发明的目的在于提供一种柴油机超速保护控制方法,转速传感器获得柴油机曲轴飞轮当前的转速值;若转速信号处于工作范围内,则将转速实测值与柴油机超速保护设定的超速阈值进行比较,若转速值高于柴油机超速保护系统的超速阈值,则执行柴油机超速保护输出控制命令,输出超速保护控制信号;若转速信号处于非工作范围内,输出对应于转速值的测试脉冲信号,根据测试反馈的转速实测值与测试脉冲信号对应的转速值比较,判断两者转速误差是否在允许误差范围内;若否,判断超速保护装置处于故障状态,输出故障指示信号。本发明可以用于在柴油机运行时,判断