
一种基于视觉的汽车轮毂定位方法.pdf

是秋****写意

1/8

2/8
3/8

4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于视觉的汽车轮毂定位方法.pdf
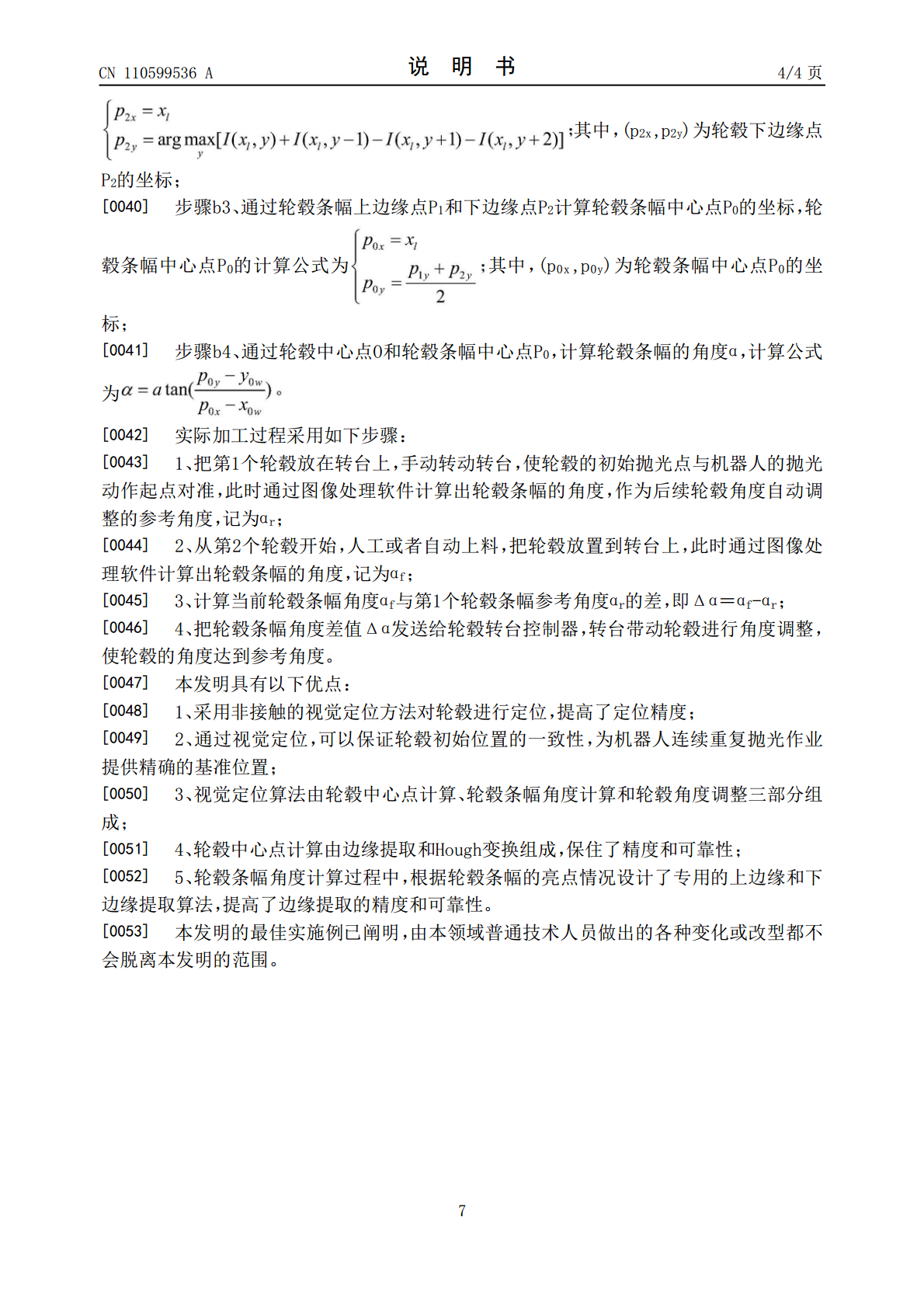
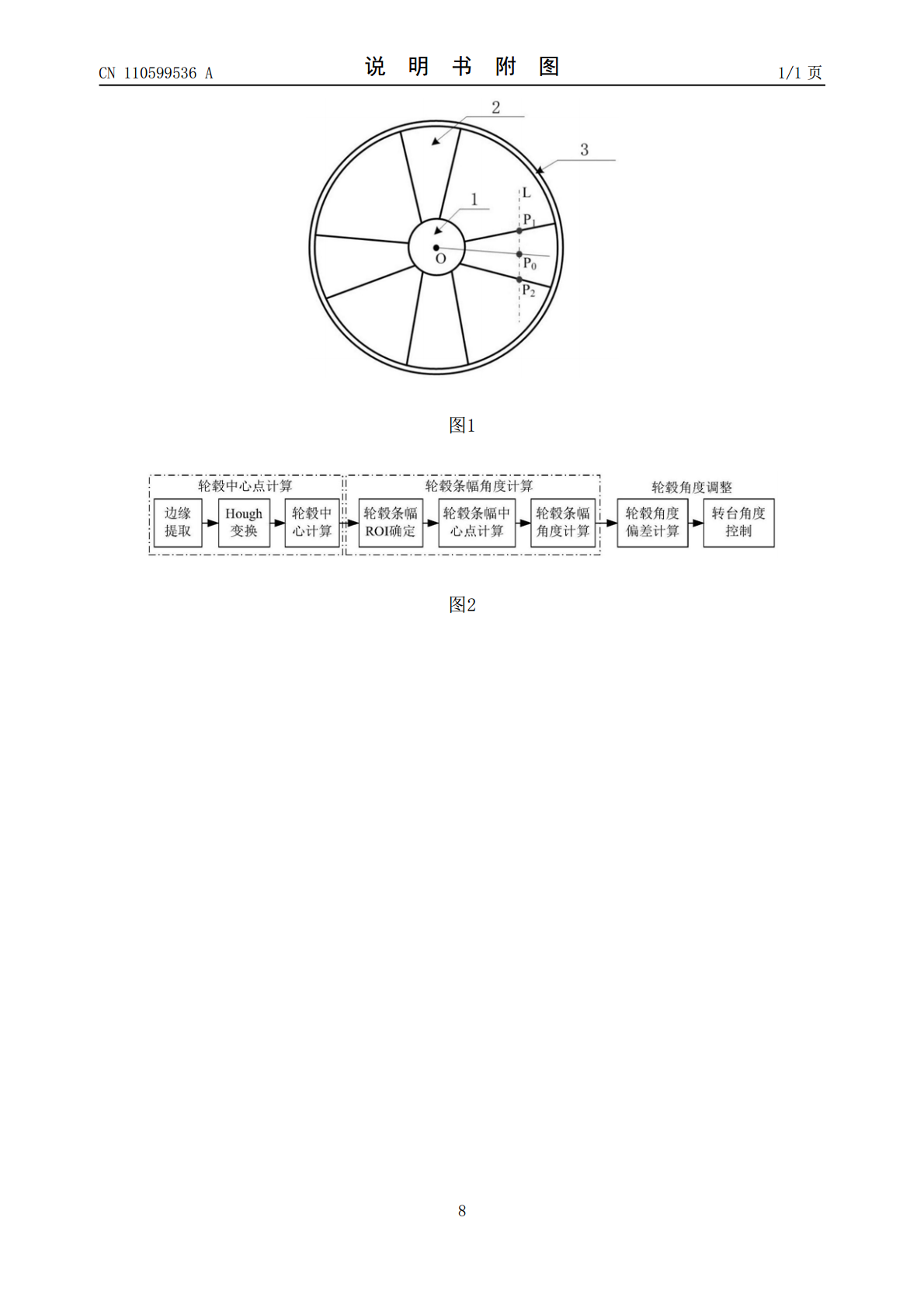
本发明公开了一种基于视觉的汽车轮毂定位方法,在机器人粗抛工位和机器人精抛工位之前增加视觉定位工位;在视觉定位工位通过对轮毂视觉取像、轮毂中心点计算、轮毂条幅角度计算,得到当前轮毂条幅的角度α

一种基于机器视觉的毛坯轮毂钻孔中心精确定位方法.pdf
本发明公开了一种基于机器视觉的毛坯轮毂钻孔中心精确定位方法,其优点在于采用超像素分割技术,对视觉图像进行聚类分割,再对分割后的图像计算每个聚类超像素的梯度能量,使得轮毂边缘的显著性大大增强,从而将轮毂图像准确的分割出来;再根据分割后的轮毂图像,获取初步圆心和半径,以此作为参考圆心进行扫描获取边缘扫描数据,剔除所获得扫描数据的噪声干扰点,进行最小二乘法拟合圆,达到毛坯轮毂钻孔定位所需的精确定位。
一种基于深度视觉的轮毂型号识别方法.pdf
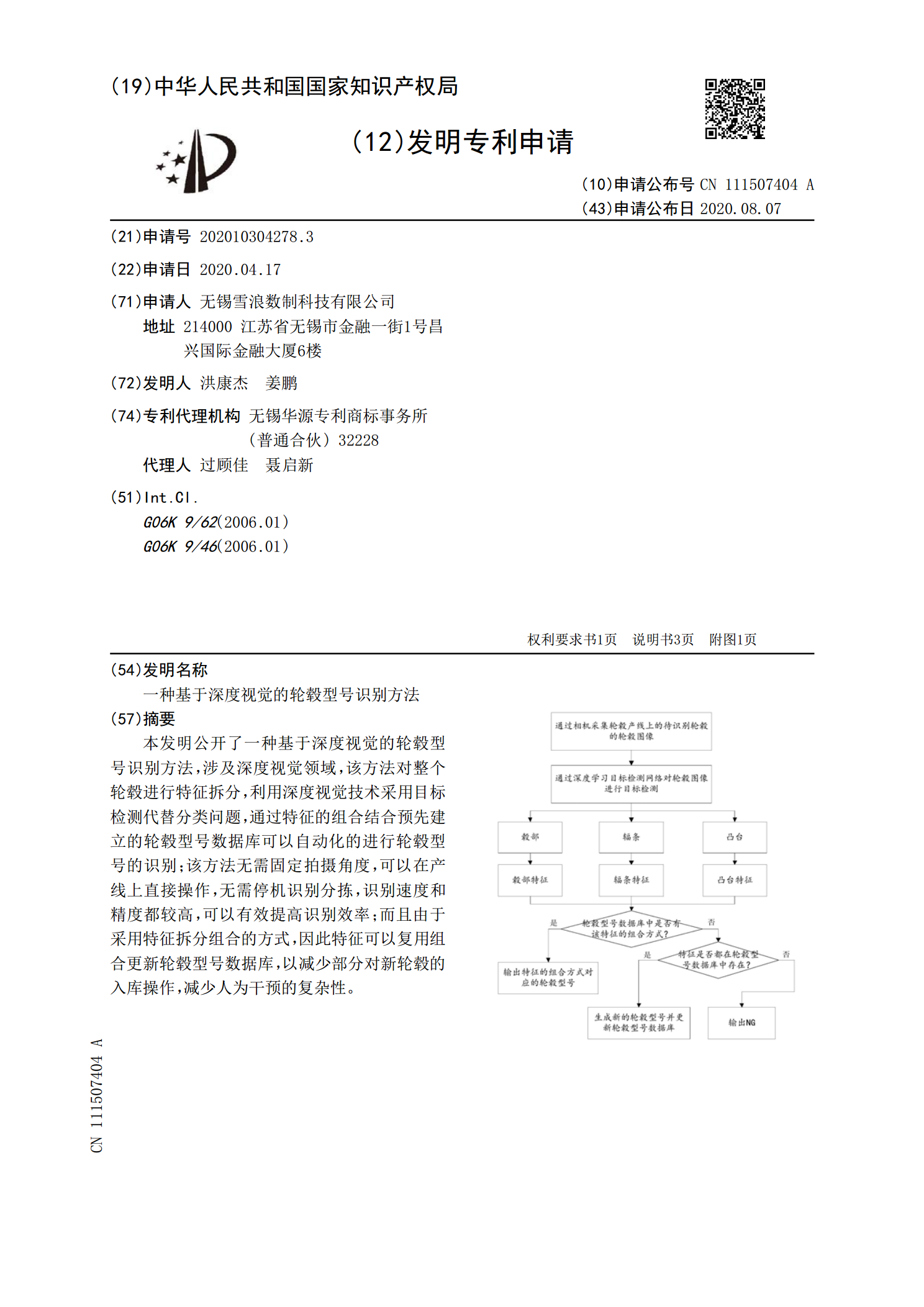
本发明公开了一种基于深度视觉的轮毂型号识别方法,涉及深度视觉领域,该方法对整个轮毂进行特征拆分,利用深度视觉技术采用目标检测代替分类问题,通过特征的组合结合预先建立的轮毂型号数据库可以自动化的进行轮毂型号的识别;该方法无需固定拍摄角度,可以在产线上直接操作,无需停机识别分拣,识别速度和精度都较高,可以有效提高识别效率;而且由于采用特征拆分组合的方式,因此特征可以复用组合更新轮毂型号数据库,以减少部分对新轮毂的入库操作,减少人为干预的复杂性。
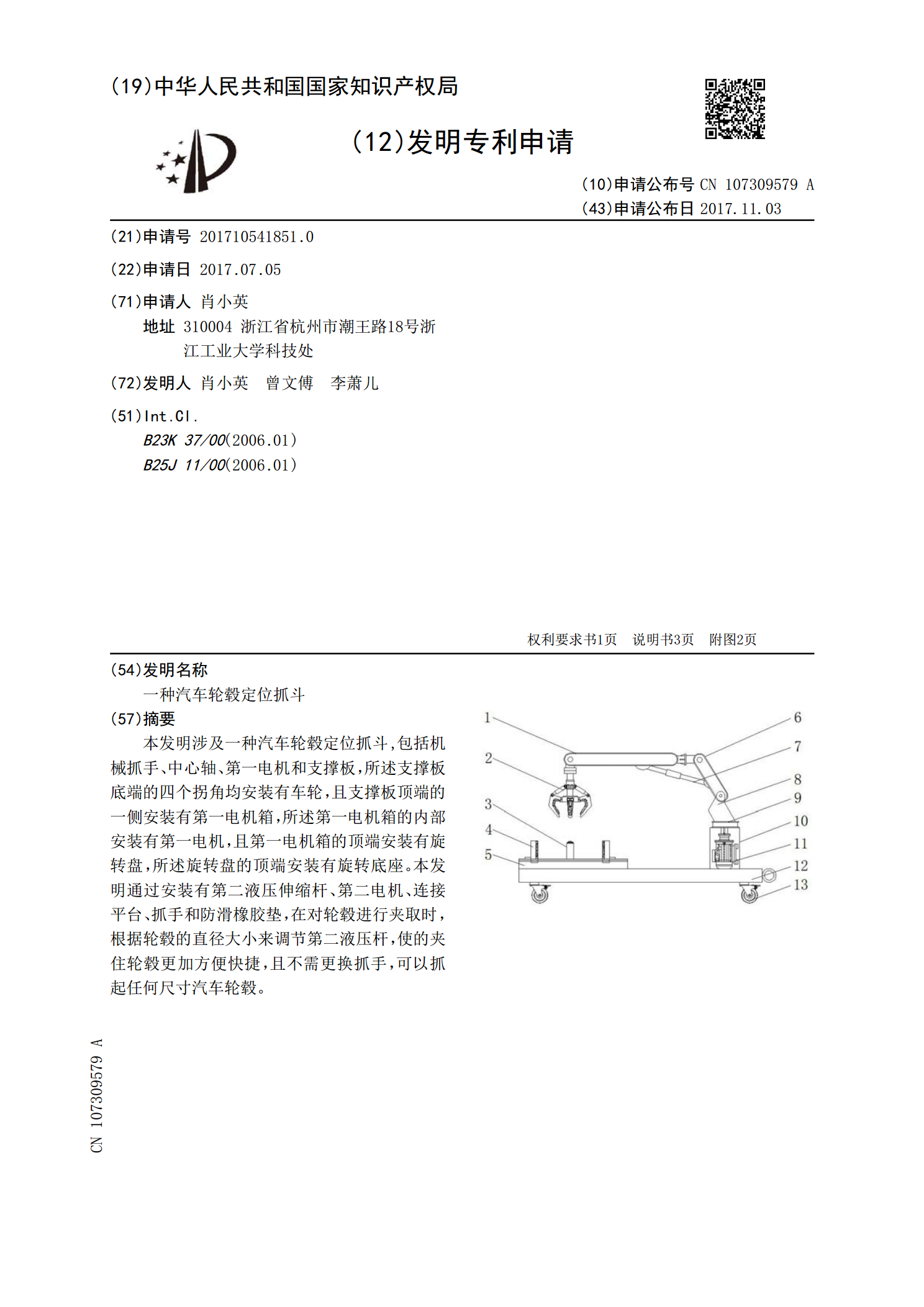
一种汽车轮毂定位抓斗.pdf
本发明涉及一种汽车轮毂定位抓斗,包括机械抓手、中心轴、第一电机和支撑板,所述支撑板底端的四个拐角均安装有车轮,且支撑板顶端的一侧安装有第一电机箱,所述第一电机箱的内部安装有第一电机,且第一电机箱的顶端安装有旋转盘,所述旋转盘的顶端安装有旋转底座。本发明通过安装有第二液压伸缩杆、第二电机、连接平台、抓手和防滑橡胶垫,在对轮毂进行夹取时,根据轮毂的直径大小来调节第二液压杆,使的夹住轮毂更加方便快捷,且不需更换抓手,可以抓起任何尺寸汽车轮毂。
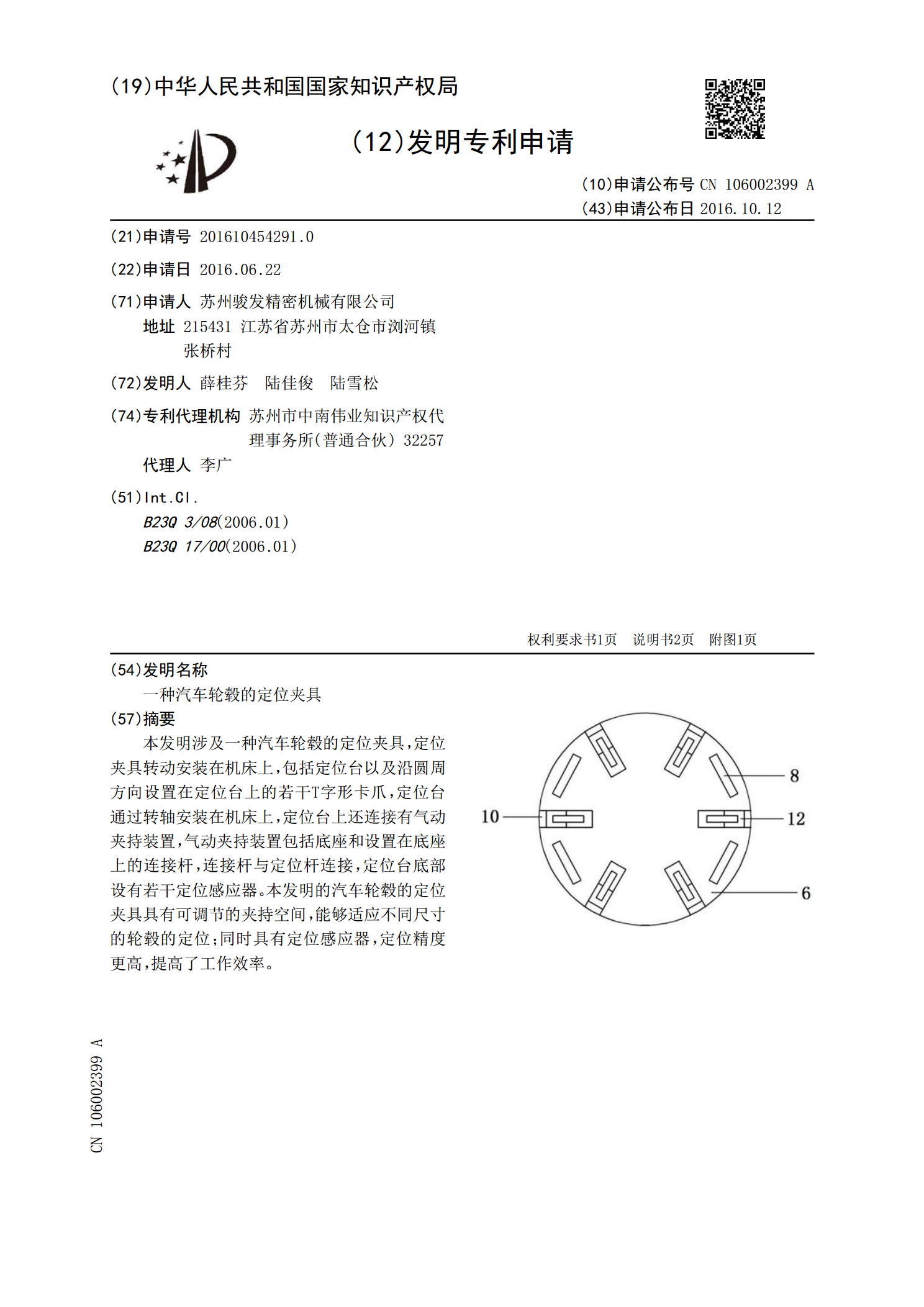
一种汽车轮毂的定位夹具.pdf
本发明涉及一种汽车轮毂的定位夹具,定位夹具转动安装在机床上,包括定位台以及沿圆周方向设置在定位台上的若干T字形卡爪,定位台通过转轴安装在机床上,定位台上还连接有气动夹持装置,气动夹持装置包括底座和设置在底座上的连接杆,连接杆与定位杆连接,定位台底部设有若干定位感应器。本发明的汽车轮毂的定位夹具具有可调节的夹持空间,能够适应不同尺寸的轮毂的定位;同时具有定位感应器,定位精度更高,提高了工作效率。