
一种基于机器视觉的毛坯轮毂钻孔中心精确定位方法.pdf

宜欣****外呢


1/8

2/8

3/8
4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于机器视觉的毛坯轮毂钻孔中心精确定位方法.pdf
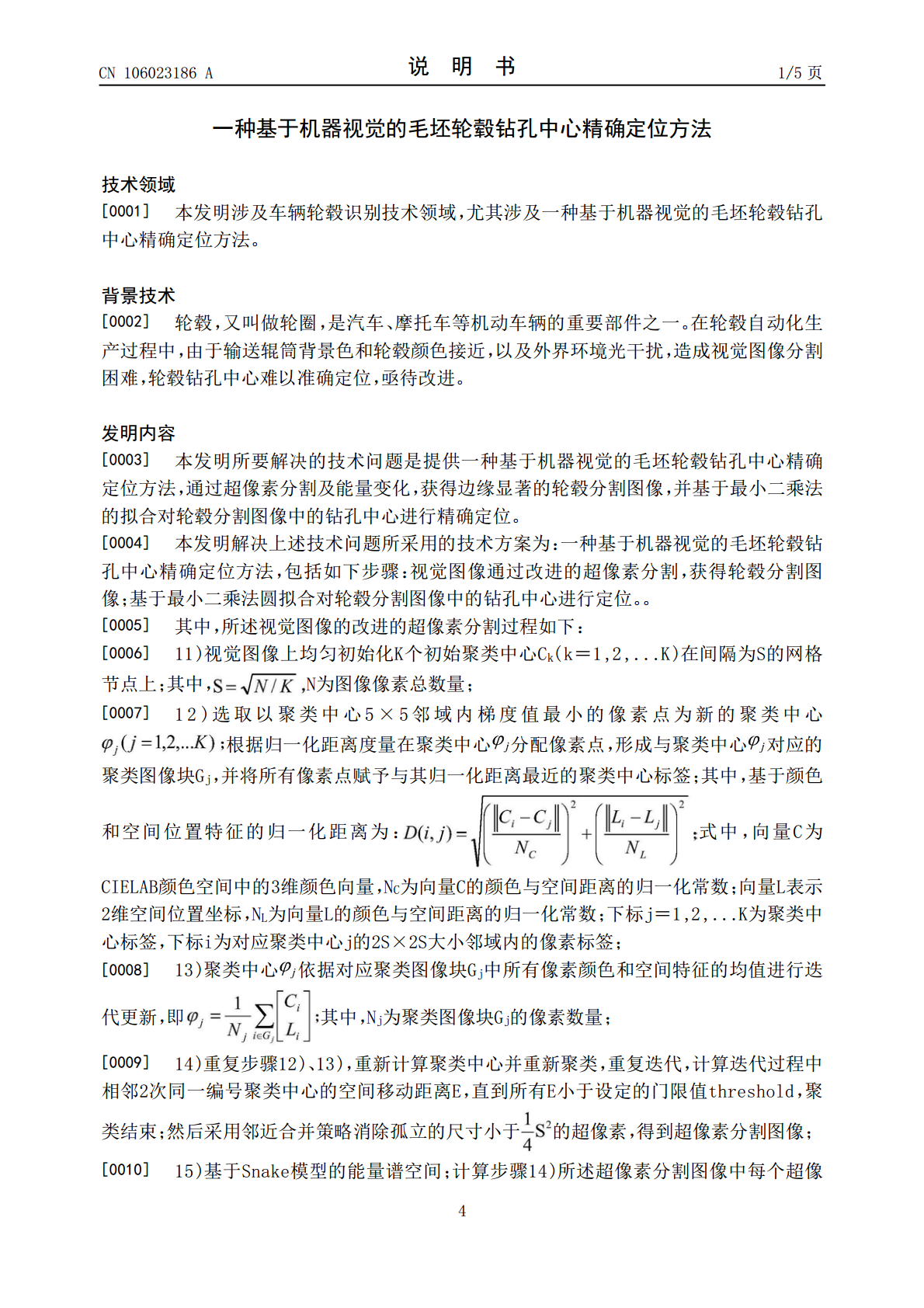
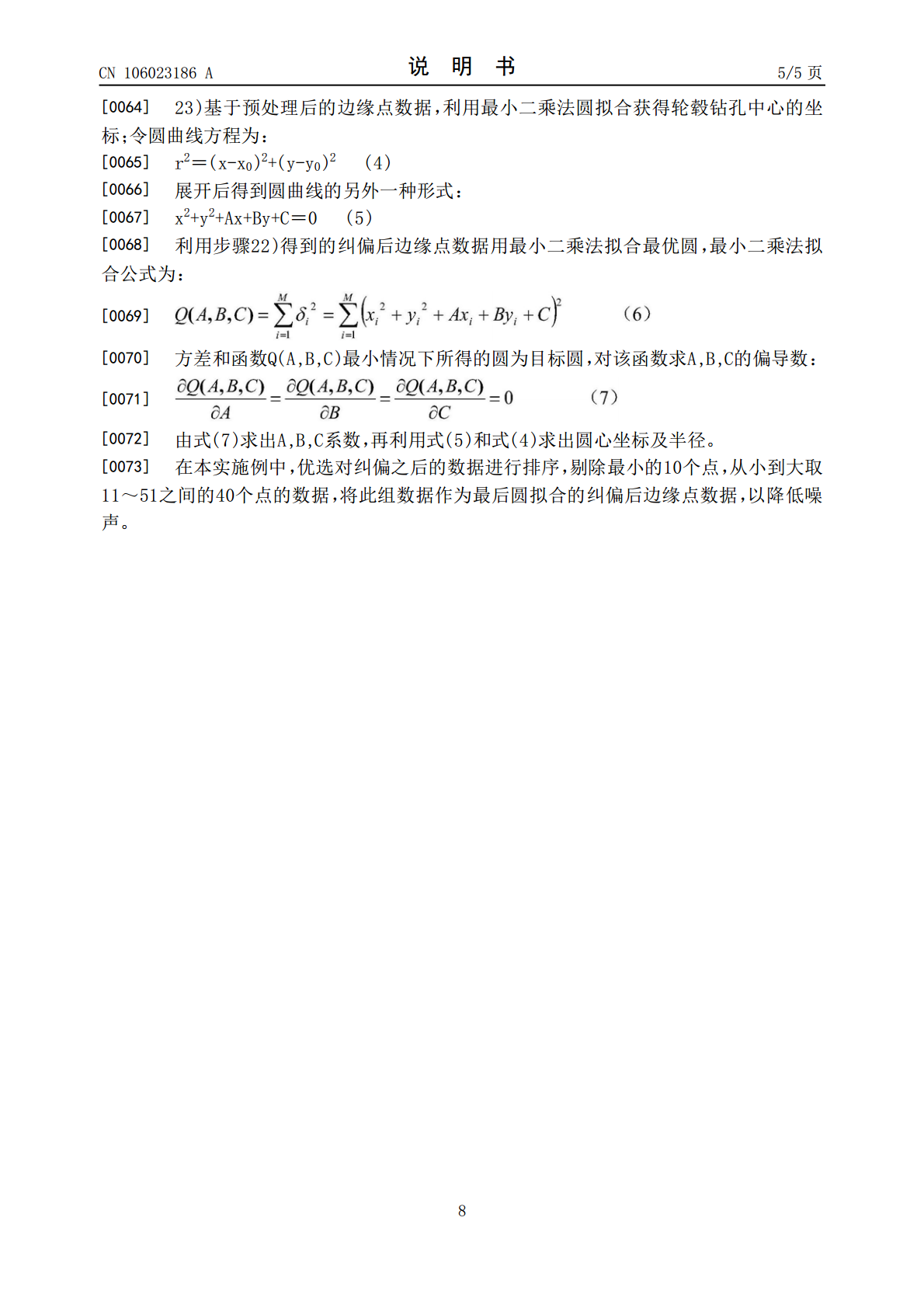
本发明公开了一种基于机器视觉的毛坯轮毂钻孔中心精确定位方法,其优点在于采用超像素分割技术,对视觉图像进行聚类分割,再对分割后的图像计算每个聚类超像素的梯度能量,使得轮毂边缘的显著性大大增强,从而将轮毂图像准确的分割出来;再根据分割后的轮毂图像,获取初步圆心和半径,以此作为参考圆心进行扫描获取边缘扫描数据,剔除所获得扫描数据的噪声干扰点,进行最小二乘法拟合圆,达到毛坯轮毂钻孔定位所需的精确定位。
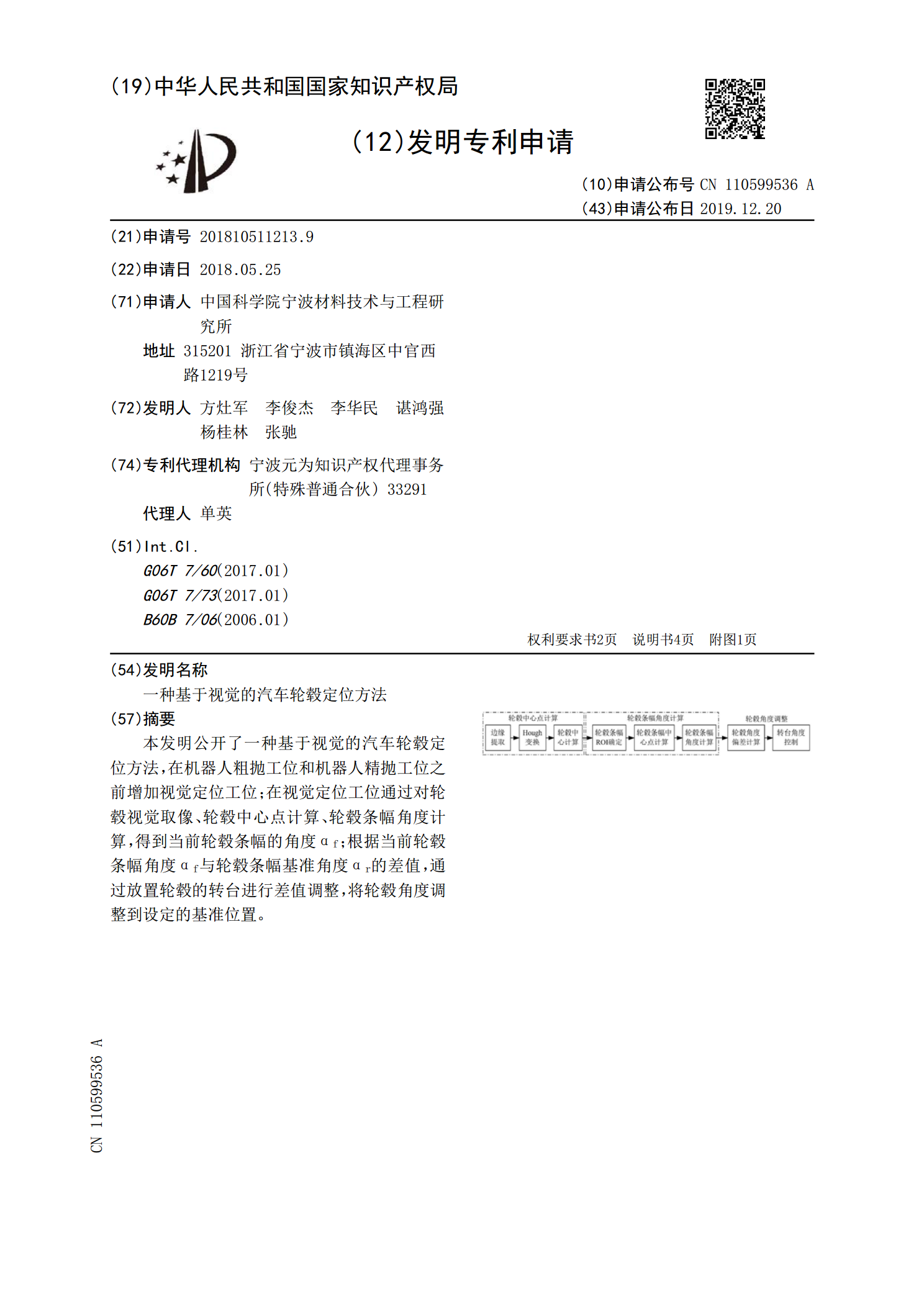
一种基于视觉的汽车轮毂定位方法.pdf
本发明公开了一种基于视觉的汽车轮毂定位方法,在机器人粗抛工位和机器人精抛工位之前增加视觉定位工位;在视觉定位工位通过对轮毂视觉取像、轮毂中心点计算、轮毂条幅角度计算,得到当前轮毂条幅的角度α

基于机器视觉的门架式纸盘精确定位抓取系统及控制方法.pdf
本发明公开了一种基于机器视觉的门架式纸盘精确定位抓取系统及控制方法,该系统包括位移系统,视觉定位系统和定位抓取控制系统;所述的位移系统包括X轴位移机构、Y轴位移机构和Z轴位移机构,各轴位移机构均由带轮,皮带,伺服电机等构成;所述的视觉定位系统包括数据采集模块、DSP处理器、CPLD驱动模块、SDRAM存储模块;所述的定位抓取控制系统包括显示系统、PLC控制系统、运动控制驱动系统。本发明充分利用门架式纸盘系统结构的空间,采用四垛纸盘供纸盘机构,减少单垛纸盘更换的频率;利用机器视觉进行精确定位,纸盘不需额外工

基于视觉的机器人末端精确定位技术的研究.docx
基于视觉的机器人末端精确定位技术的研究基于视觉的机器人末端精确定位技术的研究摘要:随着机器人在工业生产和服务领域的广泛应用,对机器人末端精确定位技术的要求越来越高。基于视觉的机器人末端精确定位技术,通过利用视觉传感器获取物体的图像信息,并结合机器学习算法进行模式识别和姿态估计,可以精确地定位机器人末端在空间中的位置和姿态。本文通过分析机器人末端精确定位技术的研究现状和存在问题,提出了一种基于视觉的机器人末端精确定位技术,通过实验验证了该技术的有效性和可行性。1.引言机器人末端精确定位技术是指利用传感器和算

基于视觉的装配机器人精确定位研究.docx
基于视觉的装配机器人精确定位研究摘要:现代制造业中,装配是一个阶段性很强的工作,需要在一定的时间内完成精准的装配,同时提高生产效率和品质。基于视觉的装配机器人是一种高精度定位的装配方法,能够针对不同装配环境和需求进行各种复杂的操作。本文从视觉定位技术、装配机器人技术、机器视觉技术、传感器控制技术等方面归纳总结了基于视觉的装配机器人精确定位的研究,并分析了其现有的应用现状和发展前景。关键词:视觉定位;装配机器人;机器视觉;传感器控制;精确定位一、引言现代制造业的发展离不开高精度装配机器人。为了提高装配效率和