
一种手持式多自由度腹腔镜.pdf

睿达****的的


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种手持式多自由度腹腔镜.pdf
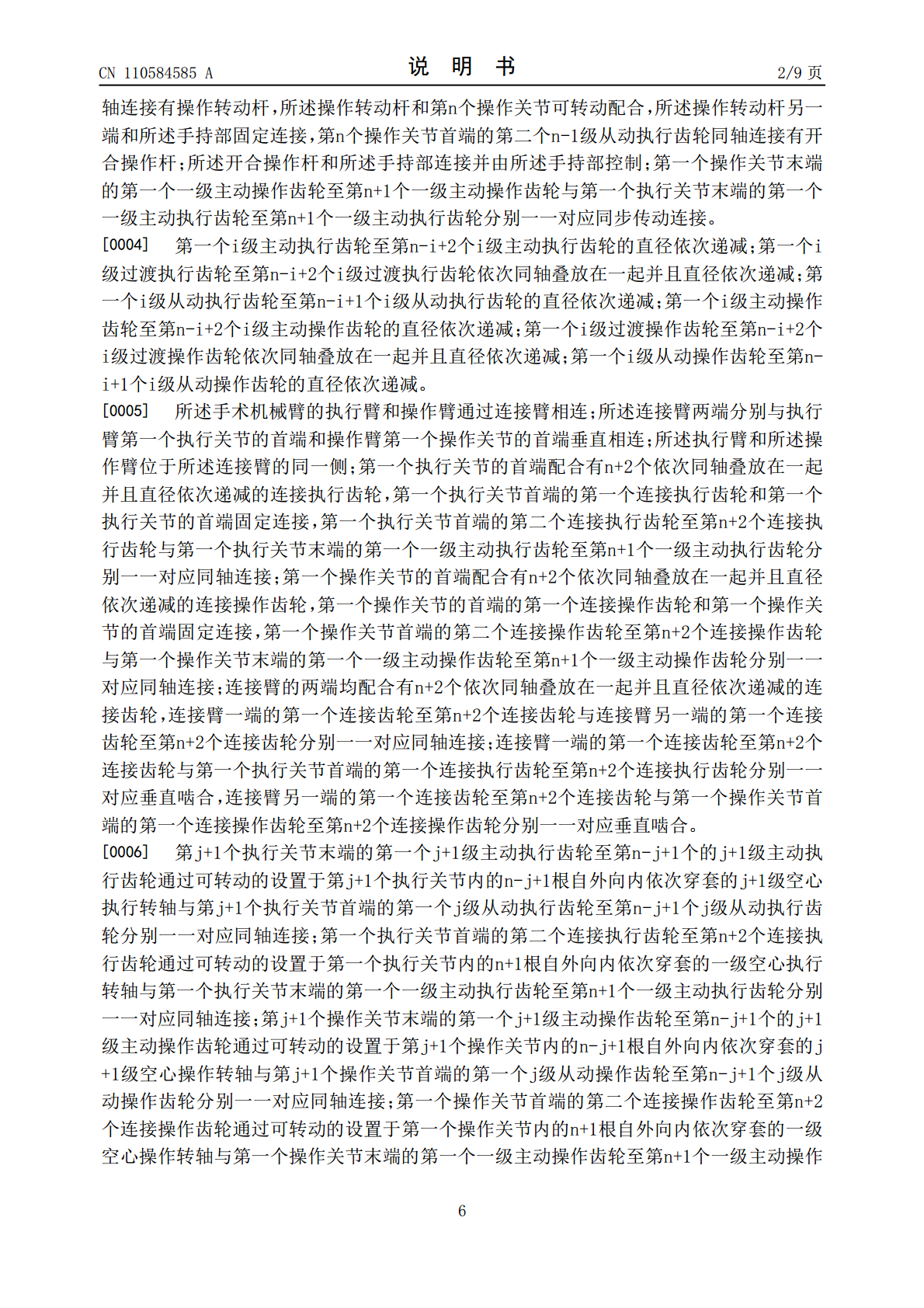
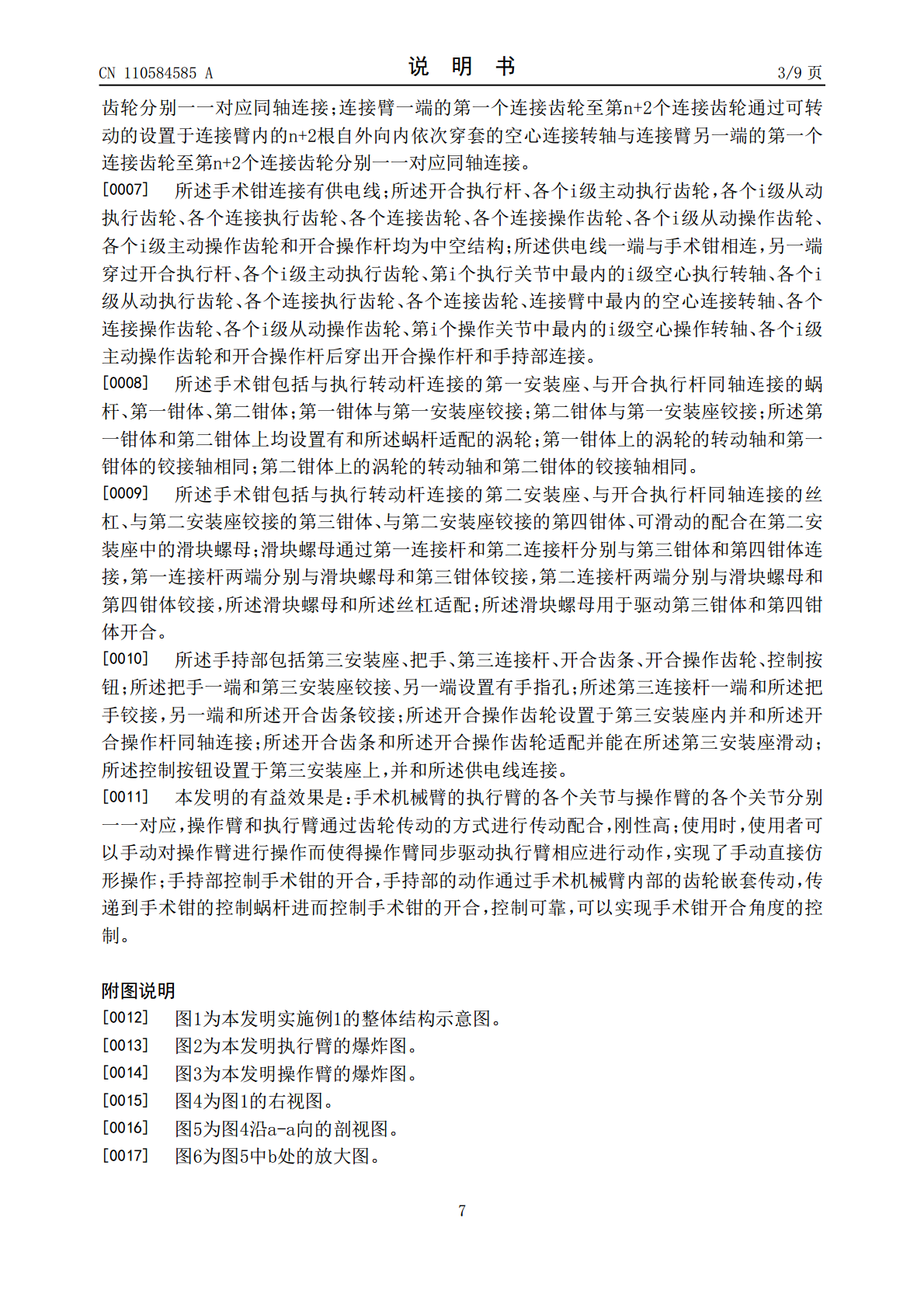
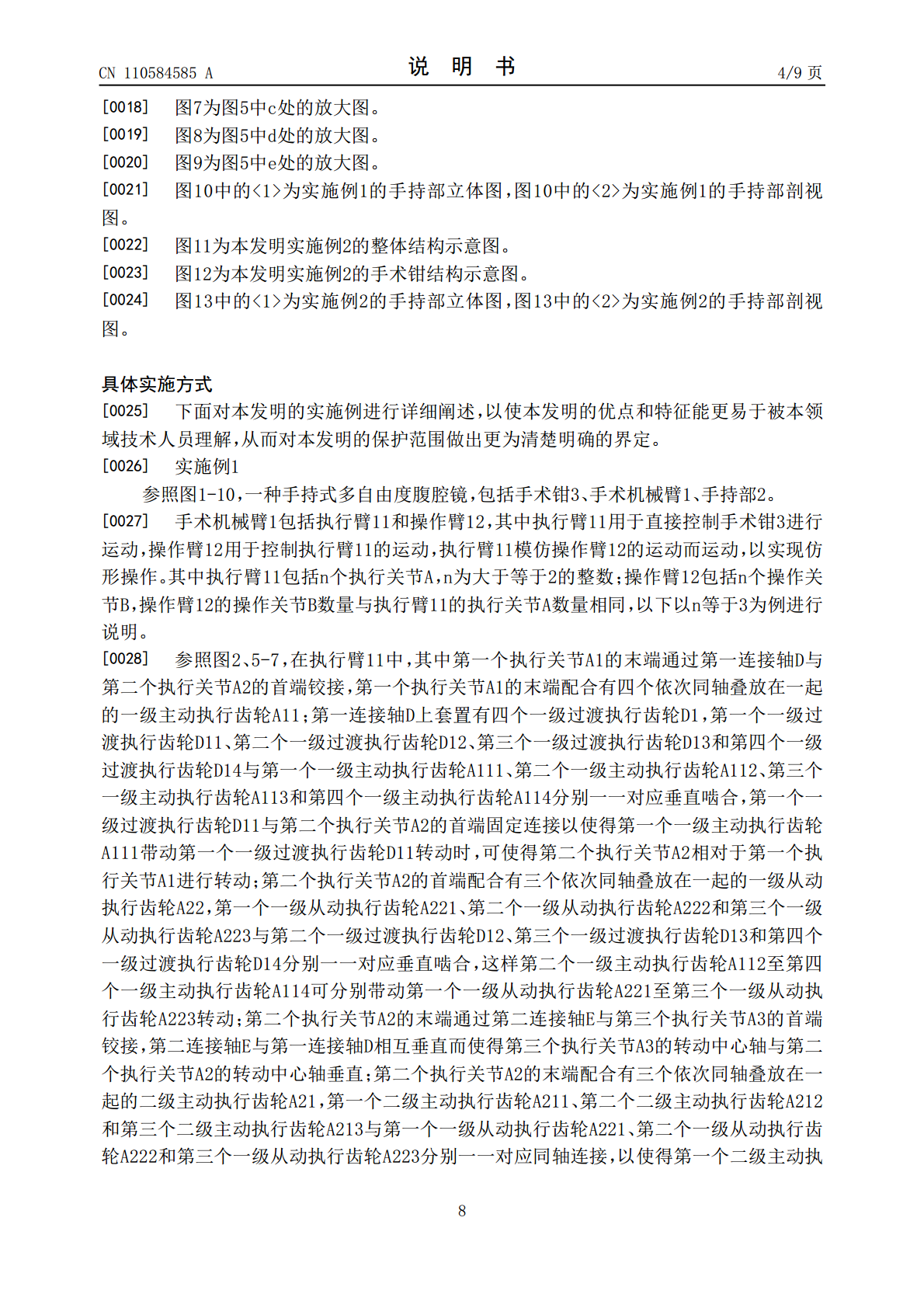
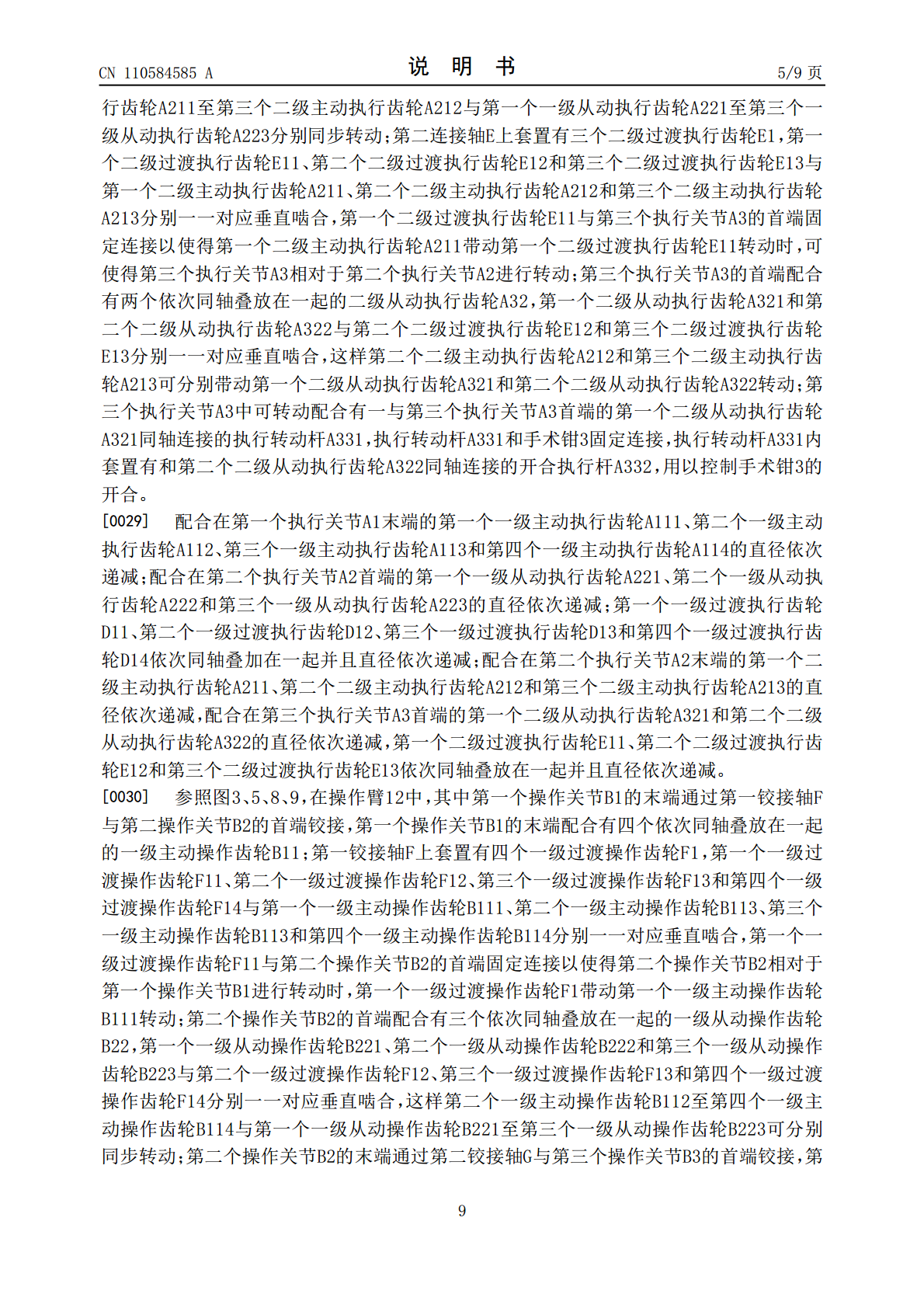
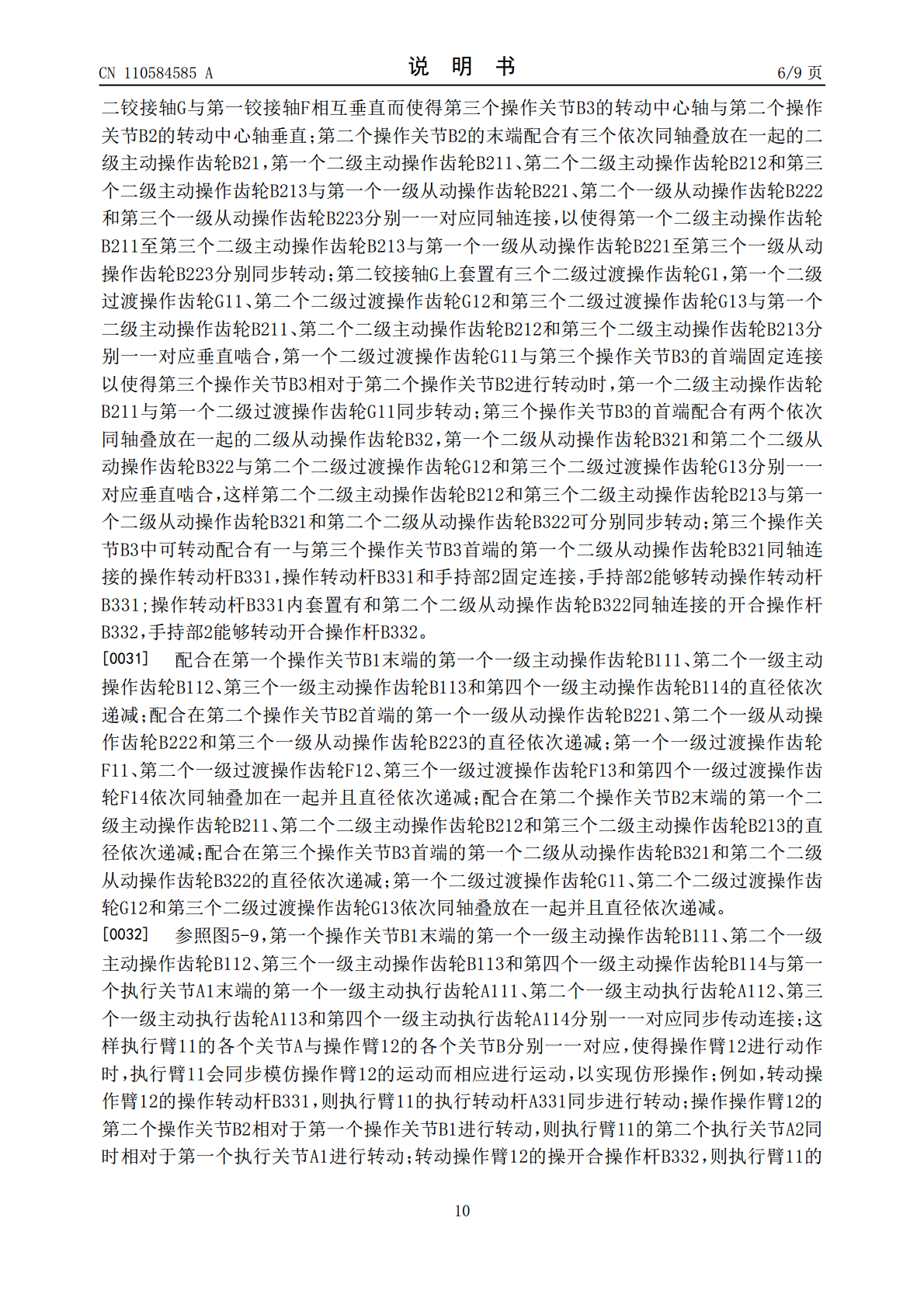
本发明公开了一种手持式多自由度腹腔镜,其特征在于,包括手术钳、手术机械臂、手持部;所述手术钳的开合由开合执行杆控制;所述手术机械臂包括执行臂和操作臂;所述执行臂包括n个执行关节,n为大于等于2的整数。本发明的有益效果是:手术机械臂的执行臂的各个关节与操作臂的各个关节分别一一对应,操作臂和执行臂通过齿轮传动的方式进行传动配合,刚性高;使用时,使用者可以手动对操作臂进行操作而使得操作臂同步驱动执行臂相应进行动作,实现了手动直接仿形操作;手持部控制手术钳的开合,手持部的动作通过手术机械臂内部的齿轮嵌套传动,传递
一种手持式单臂多自由度腹腔镜.pdf
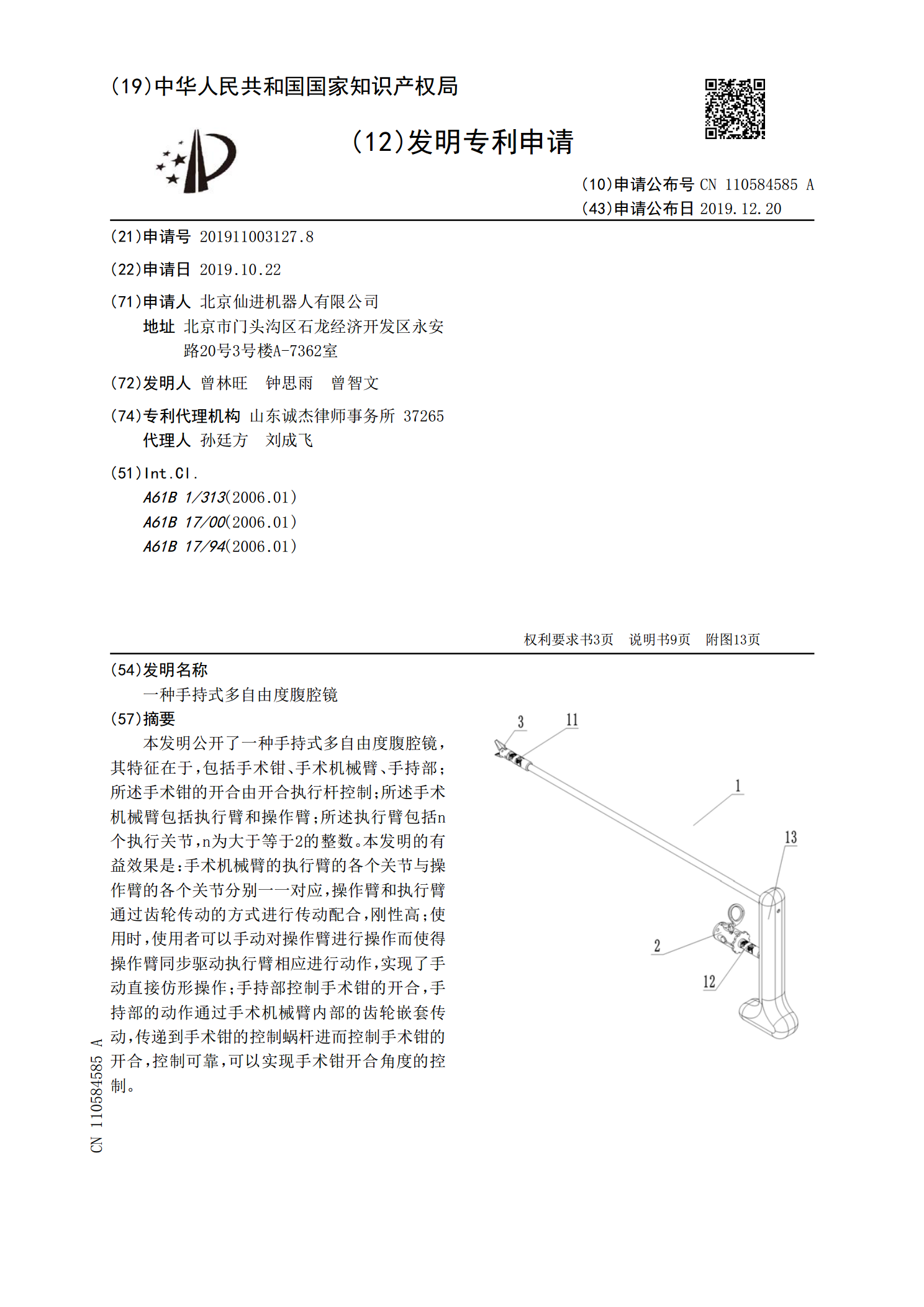
本发明公开了一种手持式单臂多自由度腹腔镜,其特征在于,包括手术钳、手术机械臂、手持部;所述手术机械臂包括执行臂和操作臂。本发明的有益效果是:手术机械臂的执行臂的各个关节与操作臂的各个关节分别一一对应,操作臂和执行臂通过齿轮传动的方式进行传动配合,使用时,使用者可以手动对操作臂进行操作而使得操作臂同步驱动执行臂相应进行动作,实现了手动直接仿形操作;可以实现拉绳的张紧调节,有利于手术钳的稳定、准确控制;蜗轮蜗杆机构具有自锁功能,张紧可靠;可以独立锁紧操作臂的操作关节,减少执行臂的自由度或锁定执行臂的姿态,方便
多自由度柔性手持式微创手术器械.pdf
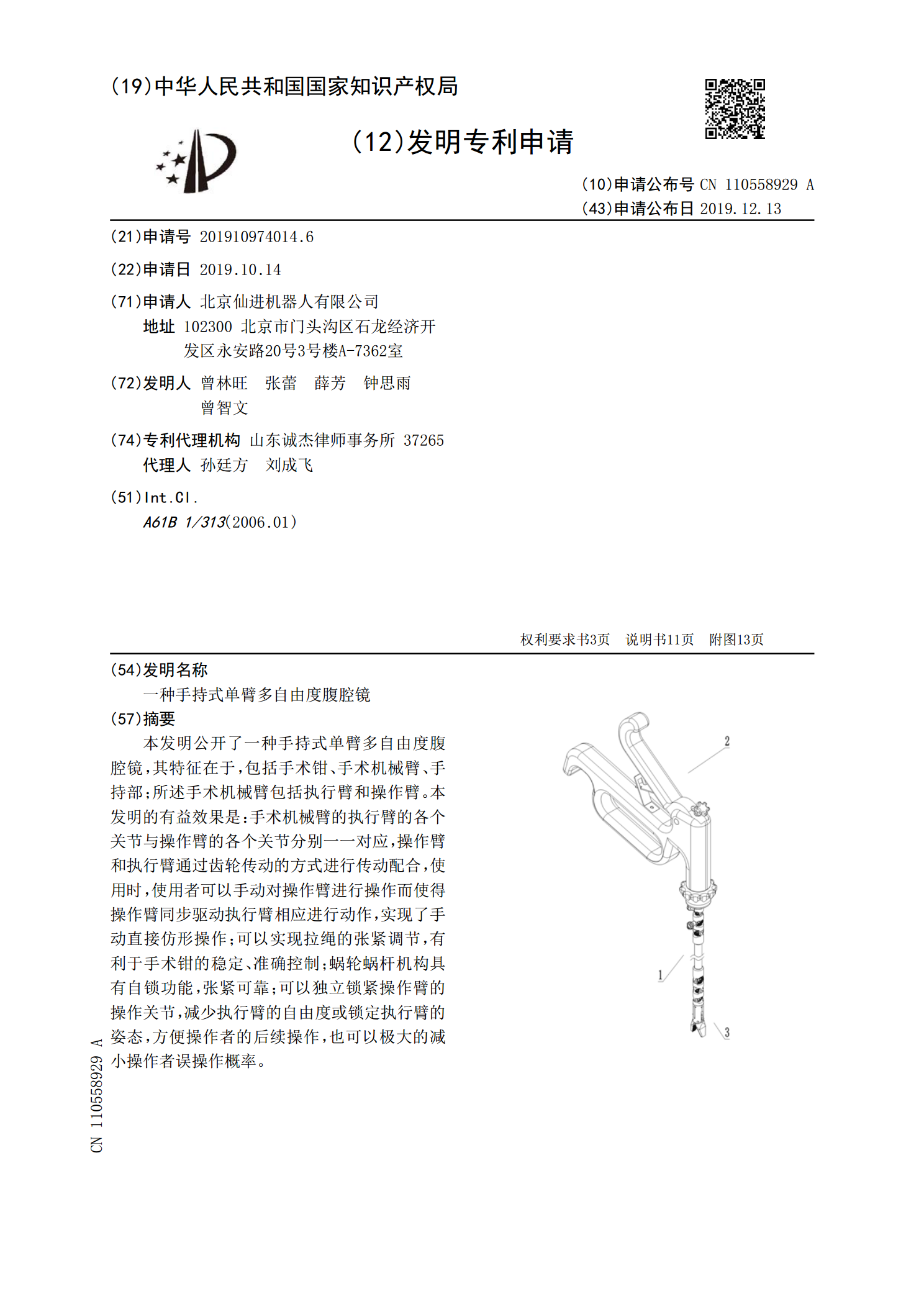
本发明涉及医疗器械领域,具体地说是一种多自由度柔性手持式微创手术器械,在壳体内设有俯仰驱动机构和左右驱动机构,俯仰驱动机构包括第一驱动滑块、第一俯仰驱动腱、第二俯仰驱动腱、第一转向轮和第一滑块驱动组件,第一俯仰驱动腱近端与第一驱动滑块相连,第二俯仰驱动腱近端穿过第一驱动滑块并绕过第一转向轮后与第一驱动滑块相连,左右驱动机构包括第二驱动滑块、第一左右驱动腱、第二左右驱动腱、第二转向轮和第二滑块驱动组件,第一左右驱动腱近端穿过第一驱动滑块后与所述第二驱动滑块相连,第二左右驱动腱近端穿过第一驱动滑块和第二驱动滑

一种用于腔镜下手持式多自由度的止血切割器.pdf
一种用于腔镜下手持式多自由度的止血切割器,它包括有操作手柄、工具杆、自转体、切割器头,其特征在于:在工具杆的上、下两端分别连接有偏转轮组,该工具杆上端的偏转轮组的上端通过自传座连接操作手柄,该工具杆下端的偏转轮组的下端通过自传座连接自传体,在该自传体的下端连接有伸缩的切割器头,在切割器头的下端设置有至少两个操作针。本发明能够辅助外科医生在单纯腔镜条件下完成止血切割操作;在对组织、器官的切除过程中省去复杂的缝合操作,实现少出血,甚至不出血,从而节省手术时间,保证手术质量。
一种多自由度机构.pdf
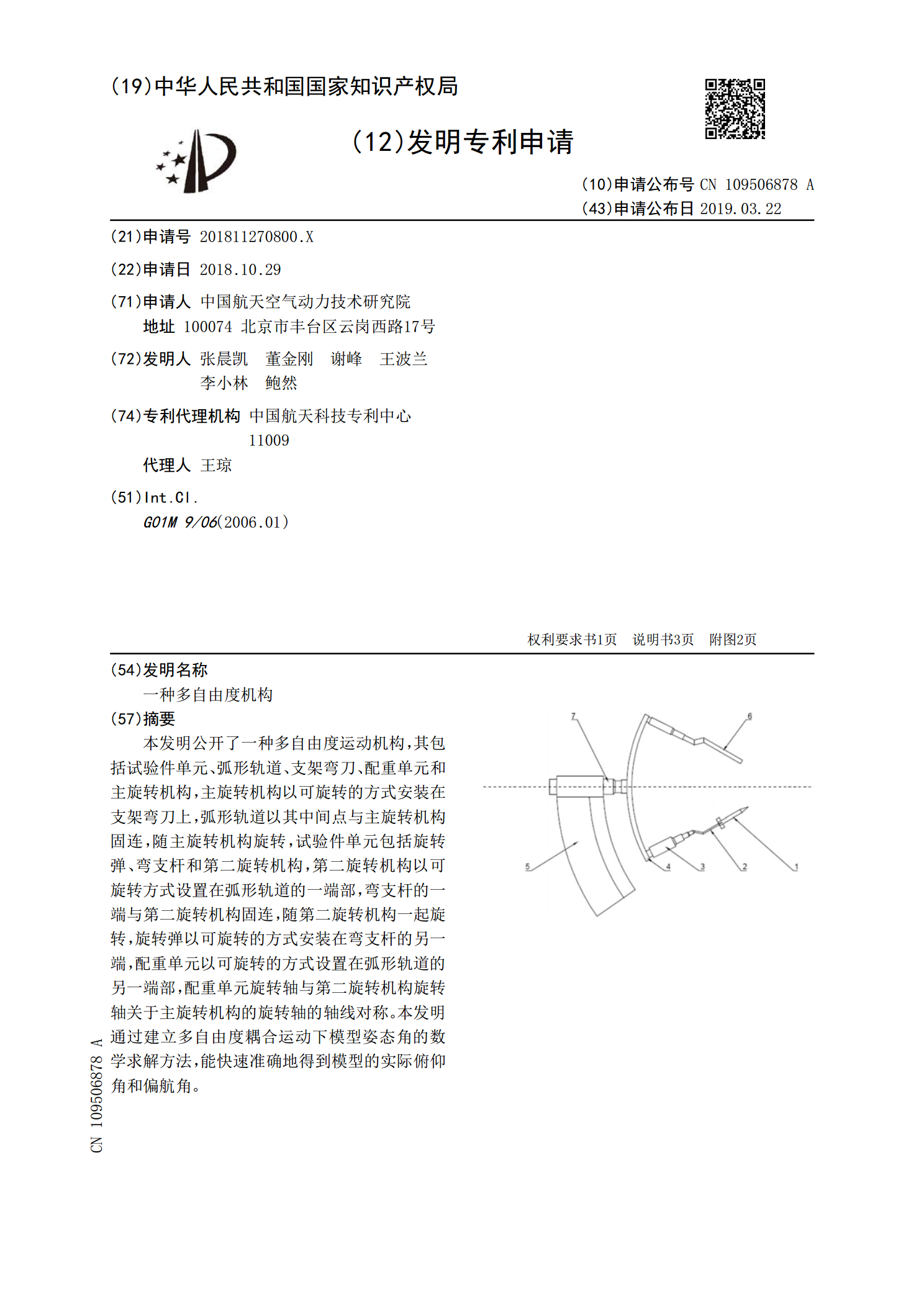
本发明公开了一种多自由度运动机构,其包括试验件单元、弧形轨道、支架弯刀、配重单元和主旋转机构,主旋转机构以可旋转的方式安装在支架弯刀上,弧形轨道以其中间点与主旋转机构固连,随主旋转机构旋转,试验件单元包括旋转弹、弯支杆和第二旋转机构,第二旋转机构以可旋转方式设置在弧形轨道的一端部,弯支杆的一端与第二旋转机构固连,随第二旋转机构一起旋转,旋转弹以可旋转的方式安装在弯支杆的另一端,配重单元以可旋转的方式设置在弧形轨道的另一端部,配重单元旋转轴与第二旋转机构旋转轴关于主旋转机构的旋转轴的轴线对称。本发明通过建立