
一种三轮全向移动机器人平台.pdf

fu****级甜

1/6
2/6
3/6
4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种三轮全向移动机器人平台.pdf
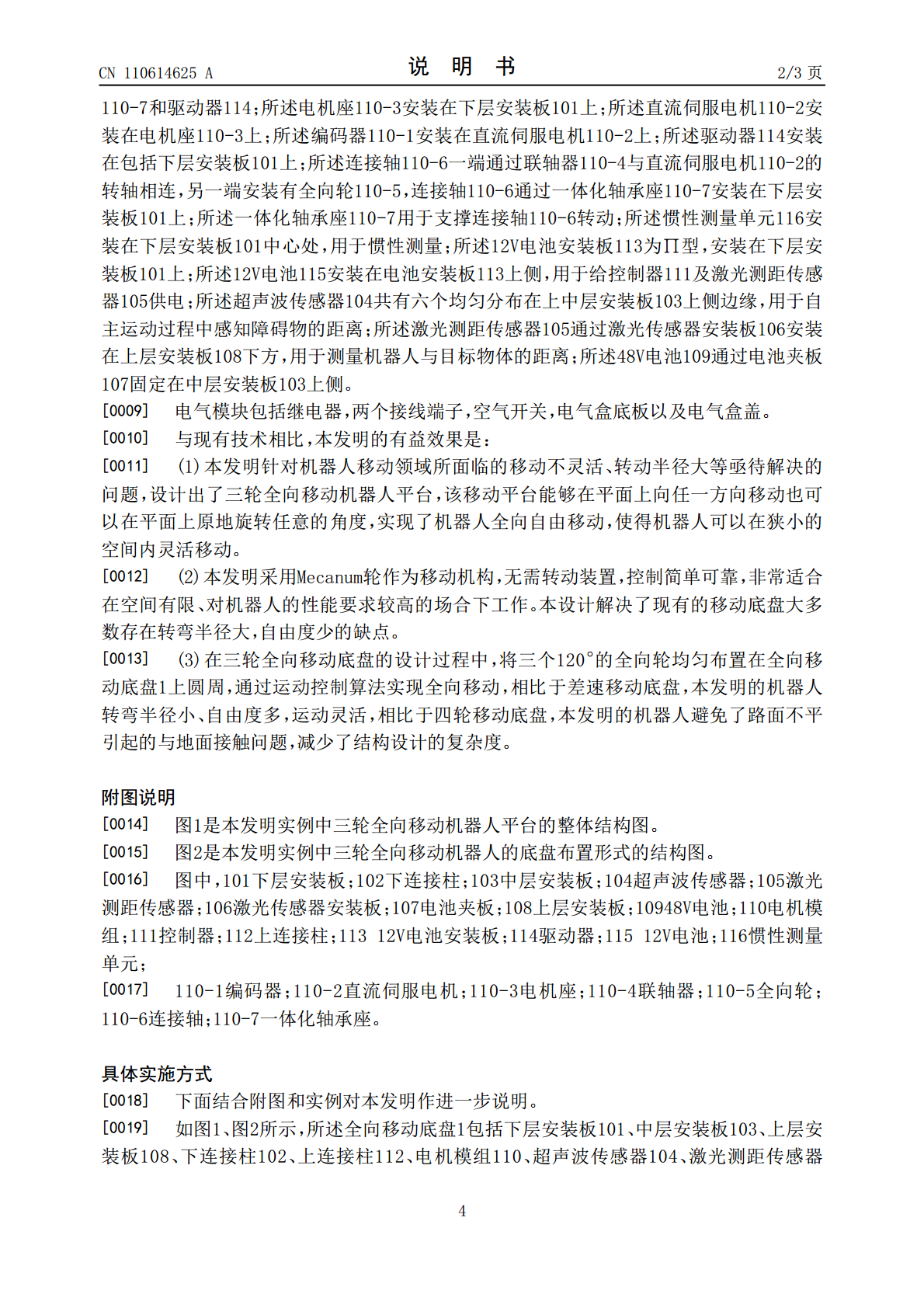
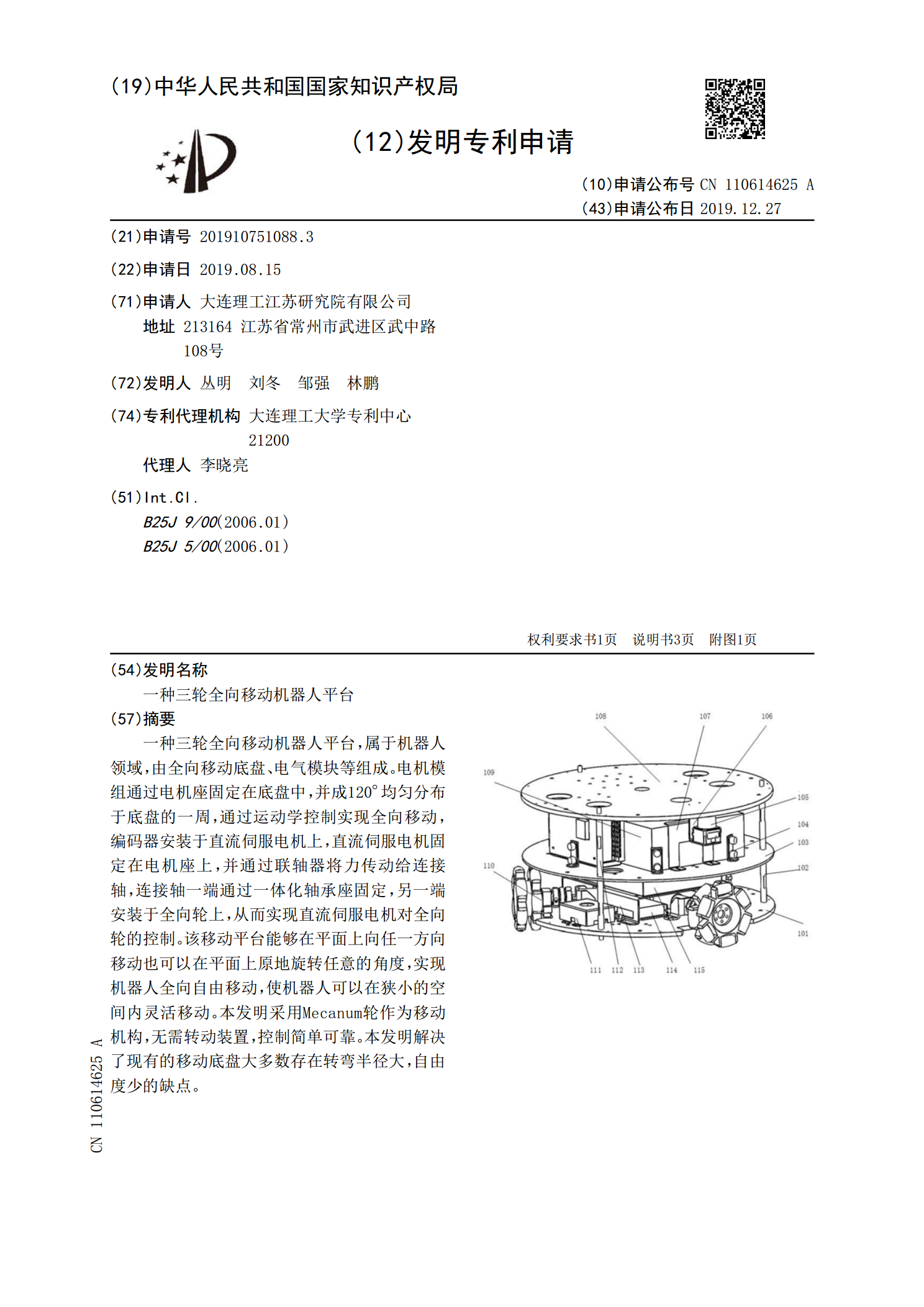
一种三轮全向移动机器人平台,属于机器人领域,由全向移动底盘、电气模块等组成。电机模组通过电机座固定在底盘中,并成120°均匀分布于底盘的一周,通过运动学控制实现全向移动,编码器安装于直流伺服电机上,直流伺服电机固定在电机座上,并通过联轴器将力传动给连接轴,连接轴一端通过一体化轴承座固定,另一端安装于全向轮上,从而实现直流伺服电机对全向轮的控制。该移动平台能够在平面上向任一方向移动也可以在平面上原地旋转任意的角度,实现机器人全向自由移动,使机器人可以在狭小的空间内灵活移动。本发明采用Mecanum轮作为移动
一种全向移动平台及全向移动机器人.pdf
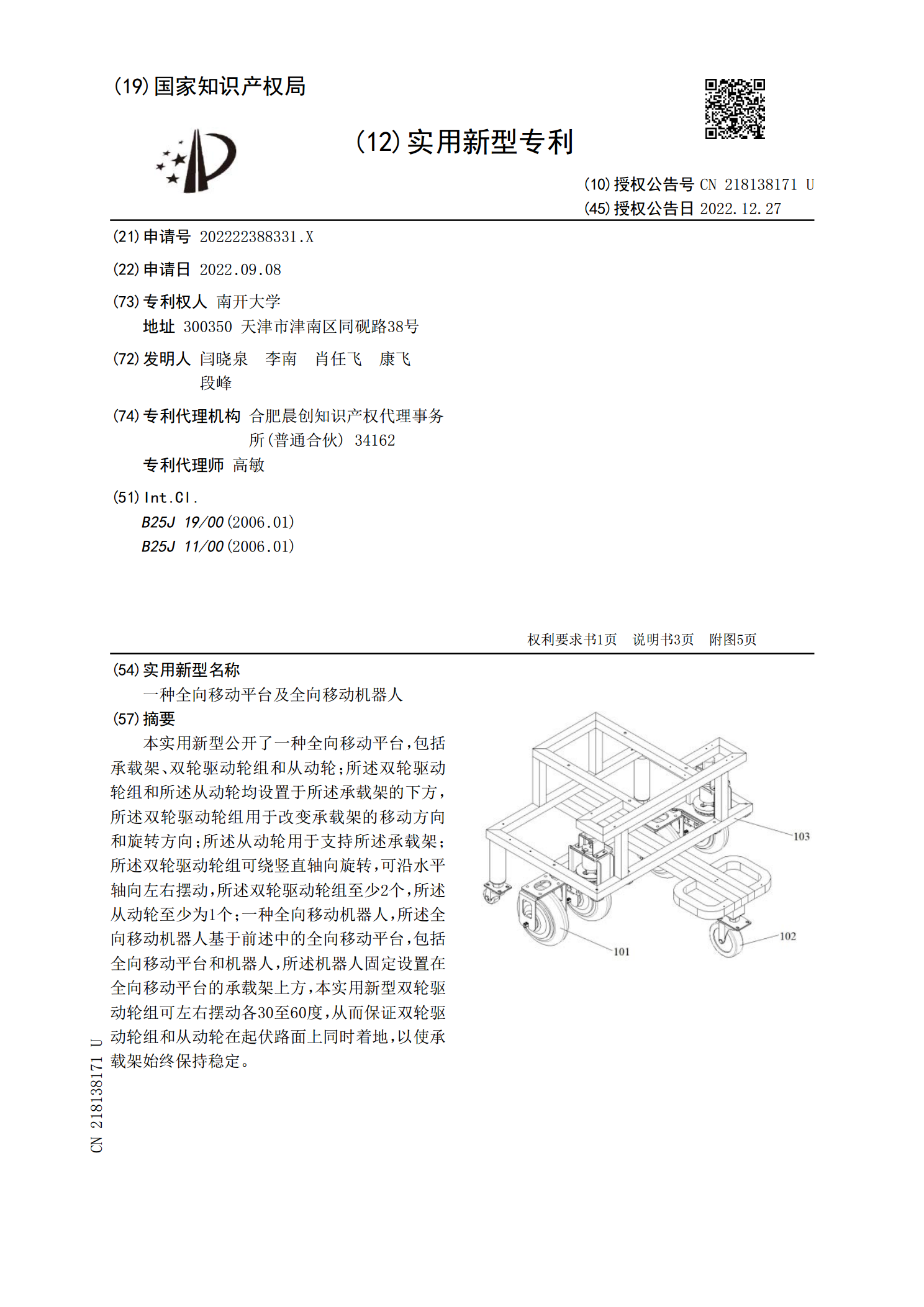
本实用新型公开了一种全向移动平台,包括承载架、双轮驱动轮组和从动轮;所述双轮驱动轮组和所述从动轮均设置于所述承载架的下方,所述双轮驱动轮组用于改变承载架的移动方向和旋转方向;所述从动轮用于支持所述承载架;所述双轮驱动轮组可绕竖直轴向旋转,可沿水平轴向左右摆动,所述双轮驱动轮组至少2个,所述从动轮至少为1个;一种全向移动机器人,所述全向移动机器人基于前述中的全向移动平台,包括全向移动平台和机器人,所述机器人固定设置在全向移动平台的承载架上方,本实用新型双轮驱动轮组可左右摆动各30至60度,从而保证双轮驱动轮

一种全向护理移动机器人平台.pdf
本发明公开了一种全向护理移动机器人平台,包括移动机构,支撑台机构,夹层机构。本发明的护理移动平台采用90°双排全向轮代替普通差速轮,通过车轮间转速与旋向的配合实现全方位运动,运动灵活,承载能力和环境适应能力强。移动机构在结构上完全对称,夹层机构位于平台中部,护理机器人平台整体成圆柱体,结构紧凑,占用空间小,适合于病房、家庭等空间狭窄的场所。护理移动机器人平台安装有无线通讯和定位模块,便于行动不便的人实时通讯以及需要实时定位的场所。护理移动机器人平台上可搭载摄像头实现远程监控,提高护理能力。本发明结构简单紧

一种移动机器人的双滚轮全向动力脚轮和全向移动平台.pdf
本发明公开了一种移动机器人的双滚轮全向动力脚轮和全向移动平台,包括机架,机架安装有竖直布置并能转动的转向轴,转向轴的下端安装有轮架;轮架设有并排布置并能独立转动的第一滚轮和第二滚轮,第一滚轮的旋转轴心与第二滚轮的旋转轴心重合;机架设有并排布置并独立工作的第一驱动电机和第二驱动电机;第一驱动电机和第二驱动电机分别通过传动机构驱动对应的第一滚轮和第二滚轮转动。本发明驱动电机位于机架,通过传动机构将运动分别传递到两个滚轮,实现两个滚轮的独立运动。无论转向轴位于什么位置,传动比保持不变。同时在轮架转向中不存在线缆

移动机器人全向平台设计.pdf
移动机器人全向平台设计摘要:为满足智能工厂全天候无人巡检和人机交互协同作业的需求,提出了一种四轮独立驱动、独立转向的全向平台设计方法,基于该方法设计了一种集高清会议系统、机器人技术、远程遥控技术、无线通讯技术于一体的移动巡检机器人,试验结果表明该全向平台的合理性和稳定性。关键字:移动机器人;全向平台;无人巡检;智能安防0引言随着国内工业化进程的加快,工业机器人市场蒸蒸日上。在传统工厂,移动机器人如AGV自动导引车(AutomatedGuidedVehicle)只负责物料运载,自动上下料、抓取、夹持等操作则