
车辆及其目标检测方法、装置.pdf

含平****ng


1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆及其目标检测方法、装置.pdf
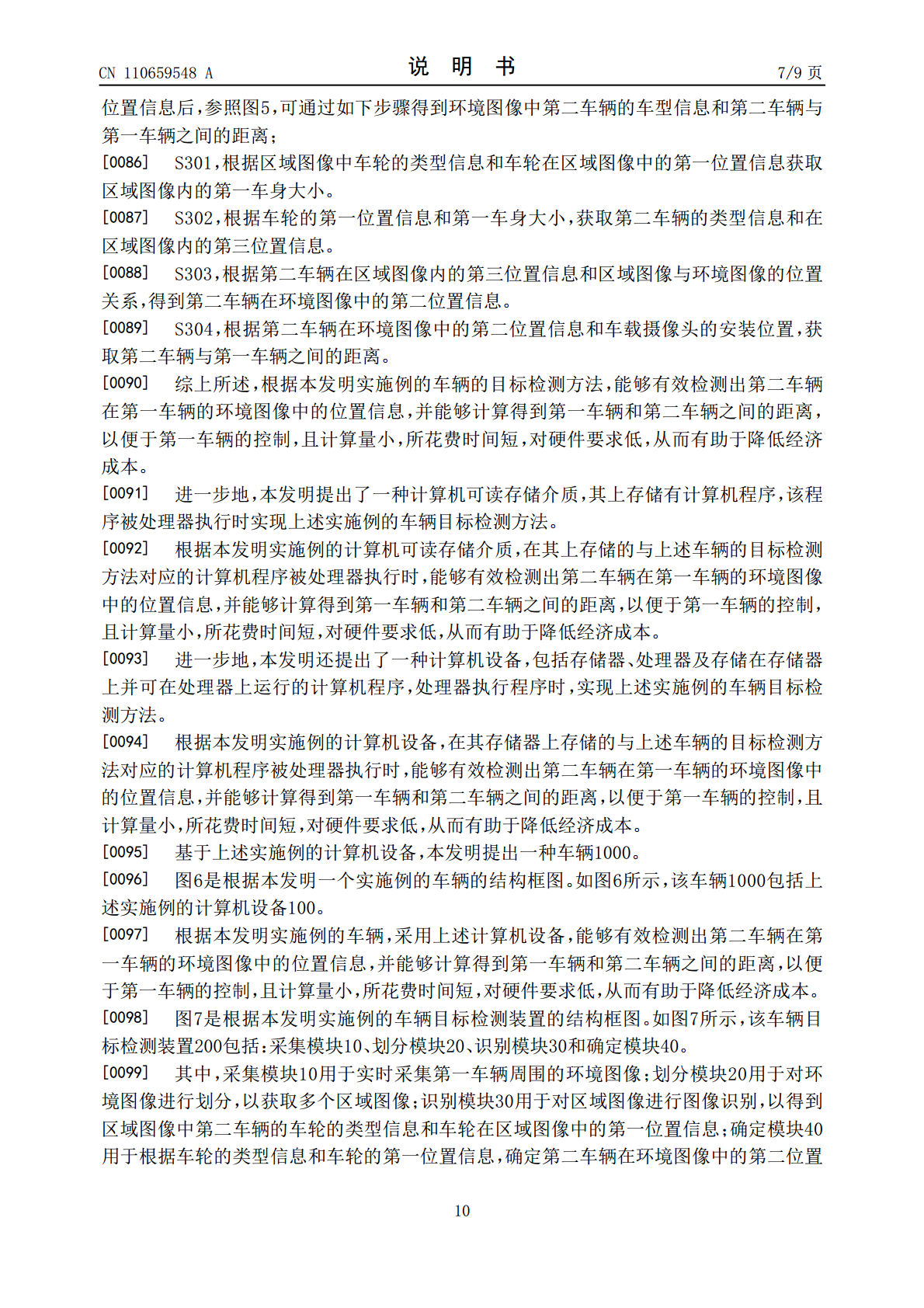
本发明公开了一种车辆及其目标检测方法装置,其中,目标检测方法包括以下步骤:实时采集第一车辆周围的环境图像;对环境图像进行划分,以获取多个区域图像;对区域图像进行图像识别,以得到区域图像中第二车辆的车轮的类型信息和车轮在区域图像中的第一位置信息;根据车轮的类型信息和车轮的第一位置信息,确定第二车辆在环境图像中的第二位置信息。该目标检测方法能够有效检测出第二车辆在第一车辆的环境图像中的位置信息,且检测过程中的计算量小,检测时间短,对硬件要求低,从而有助于降低经济成本。

车辆外轮廓检测方法及其装置.pdf
本发明公开了一种车辆外轮廓检测方法,计算机获取不同分辨率下的无目标车辆的背景图像和有目标车辆的前景图像,然后对所述不同分辨率下的背景图像和前景图像分别差分运算获得不同层的背景差分图,对所述不同层的背景差分图进行阈值分割获得第一分割图像和第二分割图像,所述第一分割图像和第二分割图像进行融合运算获得融合后的图像,最后对所述融合后的图像进行腐蚀处理获得车辆外轮廓;本发明还公开了一种车辆外轮廓检测装置,通过本发明能够大大降低检测成本,提高检测效率,因此能够广泛应用于车辆车型分类、整车尺寸测量等智能交通项目中。

距离测量方法及其装置、目标检测方法及其装置.pdf
本申请提供了一种距离测量方法,用于测量调频连续波雷达和位于调频连续波雷达的信号范围内的待测目标之间的距离,该方法包括:基于雷达回波信号,确定雷达回波信号对应的回波频谱图;基于回波频谱图,确定回波频谱图对应的N个回波反射峰,N为大于或者等于3的正整数;基于N个回波反射峰,确定待测目标与调频连续波雷达之间的距离信息。本申请提供的距离测量方法,能够基于雷达回波信号获得待测目标的实际距离,降低由于雷达信号的多次反射造成的距离误测概率,降低出现雷达测量盲区的概率,提高雷达检测的可靠性。

车辆乘客检测装置、包括该装置的系统及其方法.pdf
提供了车辆乘客检测装置、包括该装置的系统及其方法。车辆乘客检测装置包括处理器和存储装置,该处理器被配置为基于从包括具有不同反射特性的介质的至少一个或多个座椅反射的雷达信号的强度来对至少一个或多个座椅中的每个确定乘客的位置,存储装置存储与每个距离的雷达信号的强度相关联的信息以及与取决于介质的反射特性的雷达信号的强度相关联的信息。

目标检测方法、装置、车辆及存储介质.pdf
本申请涉及自动驾驶技术领域,特别涉及一种目标检测方法、装置、车辆及存储介质,其中,方法包括以下步骤:获取激光雷达的点云检测数据集;将点云检测数据集输入预先构建的稀疏卷积网络模块,输出点云检测数据集的鸟瞰特征图,其中,稀疏卷积网络模块将点云检测数据集中稀疏的三维特征转变为稠密特征图,拼接所有稠密特征图得到鸟瞰特征图;将鸟瞰特征图输入置信度校正模块,输出校正后的三维检测框,利用校正后的三维检测框检测目标。由此,解决了相关技术激光雷达目标检测算法检测精度较低、结构复杂、检测效率较低且检测范围较窄等问题。