
基于微小侧滑的汽车防侧翻控制装置及方法.pdf

志信****pp


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于微小侧滑的汽车防侧翻控制装置及方法.pdf
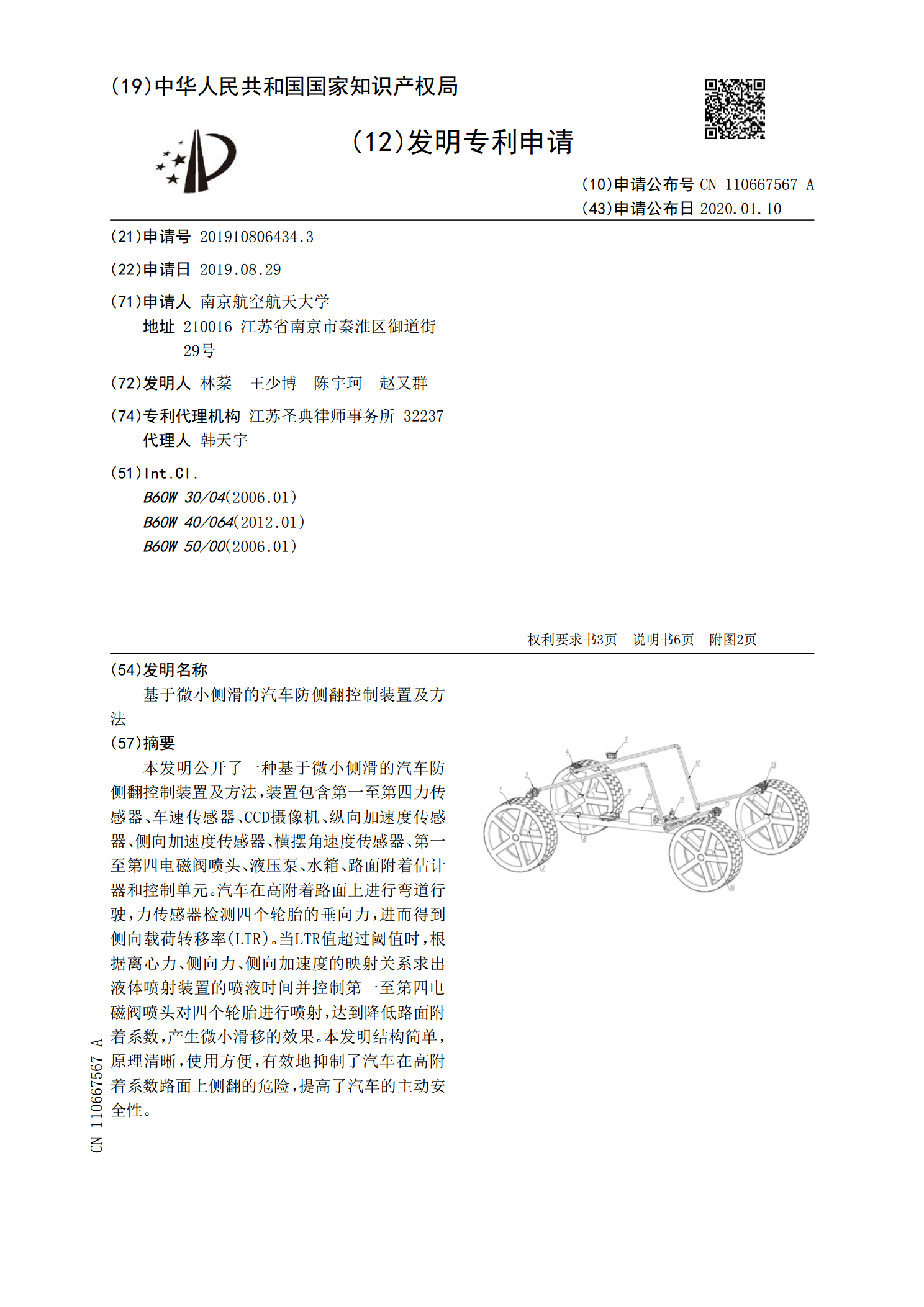
本发明公开了一种基于微小侧滑的汽车防侧翻控制装置及方法,装置包含第一至第四力传感器、车速传感器、CCD摄像机、纵向加速度传感器、侧向加速度传感器、横摆角速度传感器、第一至第四电磁阀喷头、液压泵、水箱、路面附着估计器和控制单元。汽车在高附着路面上进行弯道行驶,力传感器检测四个轮胎的垂向力,进而得到侧向载荷转移率(LTR)。当LTR值超过阈值时,根据离心力、侧向力、侧向加速度的映射关系求出液体喷射装置的喷液时间并控制第一至第四电磁阀喷头对四个轮胎进行喷射,达到降低路面附着系数,产生微小滑移的效果。本发明结构简

汽车防侧翻保护控制方法及装置.pdf
本发明公开一种汽车防侧翻保护控制方法及装置,单片机与安装在汽车四个车轮附近的角度传感器连接实时采集车身的倾斜角度信息,通过T0口与汽车速度传感器连接实时读取当前车辆行驶的速度信息,经软件进行数据分析处理,判定车辆状态并进行实时判断处理:角度传感器采集的数据正常,无爆胎无侧翻危险,不产生任何操作;若角度传感器至少有一个中断报警,同时车辆有一定速度,单片机发出控制信号,操作ABS防抱死制动系统进行减速制动,并发出PWM调速信号和左转右转信号给方向盘辅助电机控制驱动模块及时调整方向盘控制车辆方向避免车辆侧翻;同
基于轮胎侧偏变形的汽车防侧翻预警装置及方法.pdf
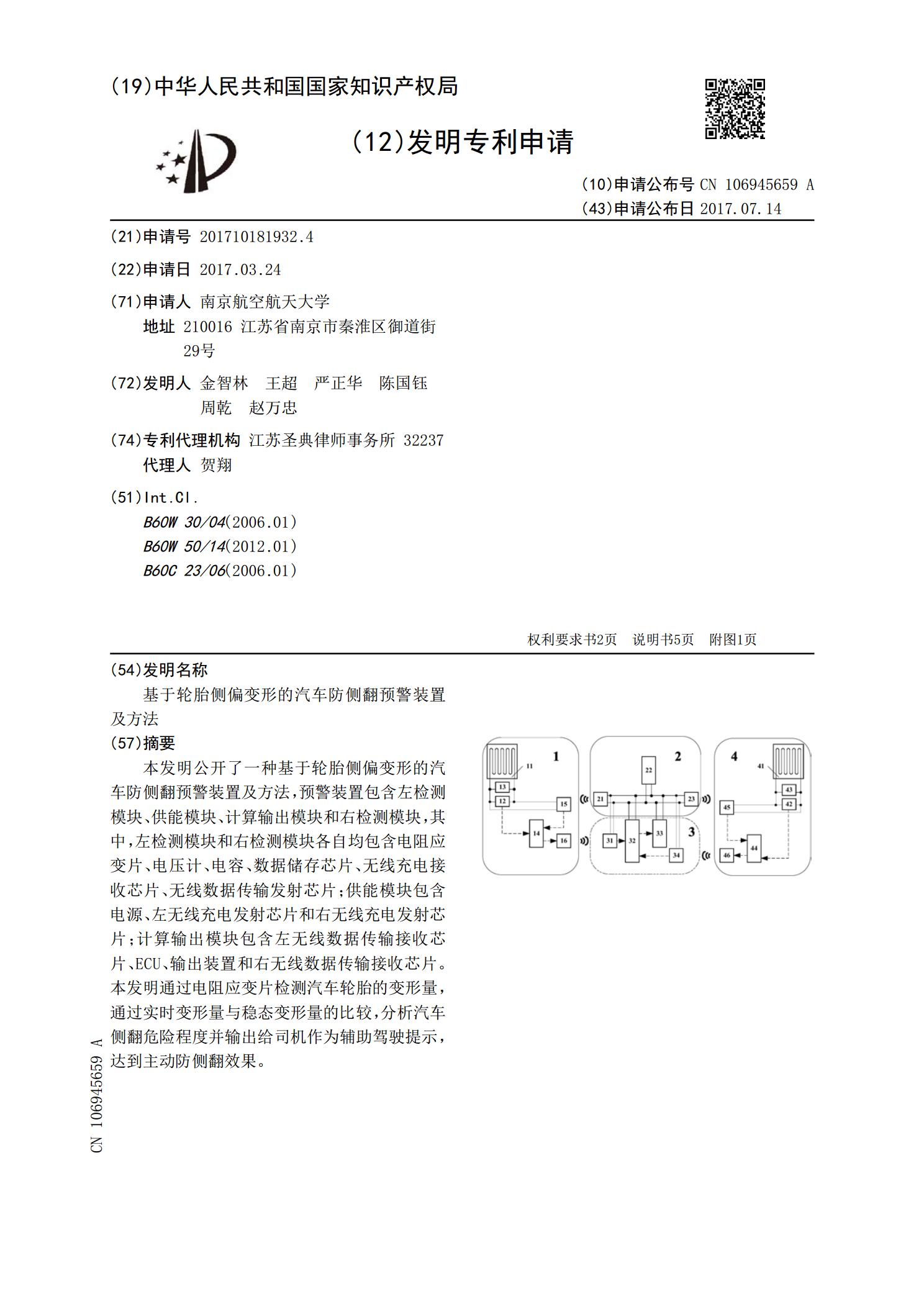
本发明公开了一种基于轮胎侧偏变形的汽车防侧翻预警装置及方法,预警装置包含左检测模块、供能模块、计算输出模块和右检测模块,其中,左检测模块和右检测模块各自均包含电阻应变片、电压计、电容、数据储存芯片、无线充电接收芯片、无线数据传输发射芯片;供能模块包含电源、左无线充电发射芯片和右无线充电发射芯片;计算输出模块包含左无线数据传输接收芯片、ECU、输出装置和右无线数据传输接收芯片。本发明通过电阻应变片检测汽车轮胎的变形量,通过实时变形量与稳态变形量的比较,分析汽车侧翻危险程度并输出给司机作为辅助驾驶提示,达到主
基于双质量飞轮的汽车防侧翻装置及其控制方法.pdf
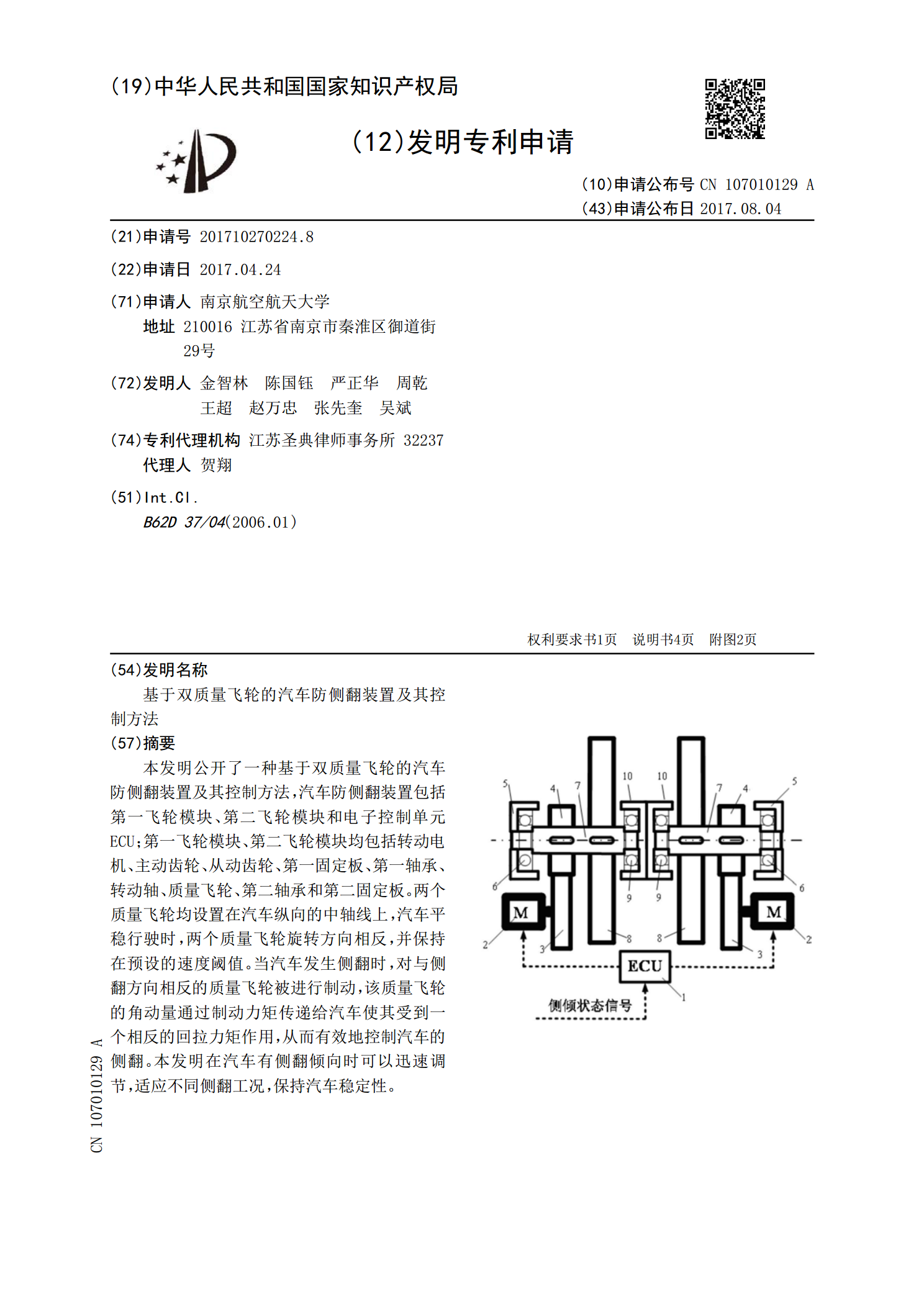
本发明公开了一种基于双质量飞轮的汽车防侧翻装置及其控制方法,汽车防侧翻装置包括第一飞轮模块、第二飞轮模块和电子控制单元ECU;第一飞轮模块、第二飞轮模块均包括转动电机、主动齿轮、从动齿轮、第一固定板、第一轴承、转动轴、质量飞轮、第二轴承和第二固定板。两个质量飞轮均设置在汽车纵向的中轴线上,汽车平稳行驶时,两个质量飞轮旋转方向相反,并保持在预设的速度阈值。当汽车发生侧翻时,对与侧翻方向相反的质量飞轮被进行制动,该质量飞轮的角动量通过制动力矩传递给汽车使其受到一个相反的回拉力矩作用,从而有效地控制汽车的侧翻。
防汽车侧翻装置.pdf
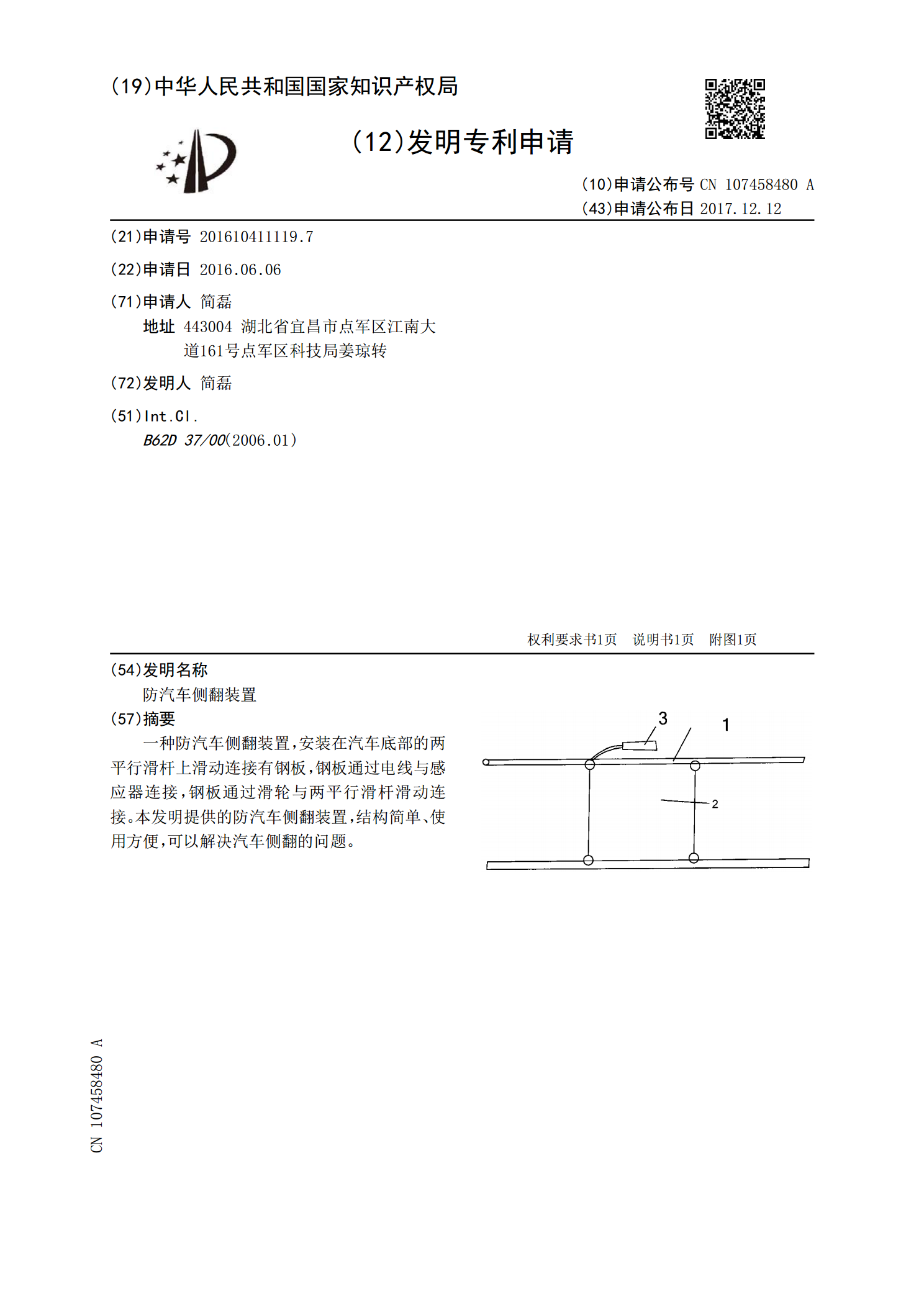
一种防汽车侧翻装置,安装在汽车底部的两平行滑杆上滑动连接有钢板,钢板通过电线与感应器连接,钢板通过滑轮与两平行滑杆滑动连接。本发明提供的防汽车侧翻装置,结构简单、使用方便,可以解决汽车侧翻的问题。