
一种双马八足行走机构防爆机器人.pdf

小寄****淑k


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种双马八足行走机构防爆机器人.pdf
本发明公开了一种双马八足行走机构防爆机器人,涉及机器人领域,其技术要点是:包括机架、所述机架上设有稳步行进装置、传动装置;所述稳步行进装置位于机架两侧平行设有两组,各组稳步行进装置包括八条七连杆机械腿,所述七连杆机械腿可做出抬腿,向前伸腿,向后蹬腿等动作,步进时各组稳步行进装置的八条七连杆机械腿,所述传动装置用于驱动机架单侧的四组七连杆机械腿实现步进运动,所述传动装置对称设有两组,分别位于机架两侧处,各组所述传动装置分别包括一个步进电机、两个主动链轮,两条传动链,两个输出链轮和输出轴,具有能适应落差较大或

一种多足机器人行走机构.pdf
本发明属于移动机器人领域,尤其涉及一种多足机器人行走机构。本发明提供了一种多足机器人行走机构,包括:机器人行走足;机器人行走足姿态控制装置;机器人行走履带;其中,所述机器人行走足包含三个关节,固定在机器人行走履带上,可通过机器人行走足姿态控制装置控制,其作用在于提供对地面及其他支撑物的抓紧力和支撑力;所述机器人行走足姿态控制装置主要用于控制行走足适时张开和抓紧;所述机器人行走履带并不直接接触地面,而是通过固定在其上的行走足接触地面,实现机器人的前进后退。本发明结合了多足行走和履带式行走的特点,既提高越障能

一种含有直线关节的双足机器人行走机构.pdf
本发明公开了一种含有直线关节的双足机器人行走机构,包括腰部机构,所述腰部机构两侧均设置一腿部机构,两个腿部机构均通过髋关节与腰部机构连接,腿部机构底部与足部机构连接;所述腿部机构包括腿部本体,所述腿部本体内配合设置直线关节,所述直线关节包括主动部和从动部,所述从动部通过连接件与横向旋转动力装置连接,所述主动部运作带动从动部上下直线运动进而使腿部本体上下移动抬腿,横向旋转动力装置运转带动腿部本体前后向摆动,两个腿部机构的横向旋转动力装置交替运转带动腿部本体实现交替迈腿动作。将双足机器人的大腿、膝关节、小腿整

二足步行机器人的行走机构.pdf
本发明公开了一种二足步行机器人的行走机构,它包括前腿、后腿、前脚、后脚、一个可双向旋转的驱动电机、凸轮、前单向转轮及后单向转轮。驱动电机安装在机器人的臀部上且位于前腿和后腿之间;凸轮安装在驱动电机的输出轴上且可轮流地驱动前单向转轮和后单向转轮。前单向转轮安装在前腿上,后单向转轮安装在后腿上,前腿和后腿的上端分别可滑动且可转动连接在机器人的臀部的前后端上,前腿和后腿的上端均安装有锁定机构;前脚和后脚上均安装有压力传感器,每个压力传感器均与机器人内部的控制器电连接,控制器均与每个锁定机构电连接。该二足步行机器
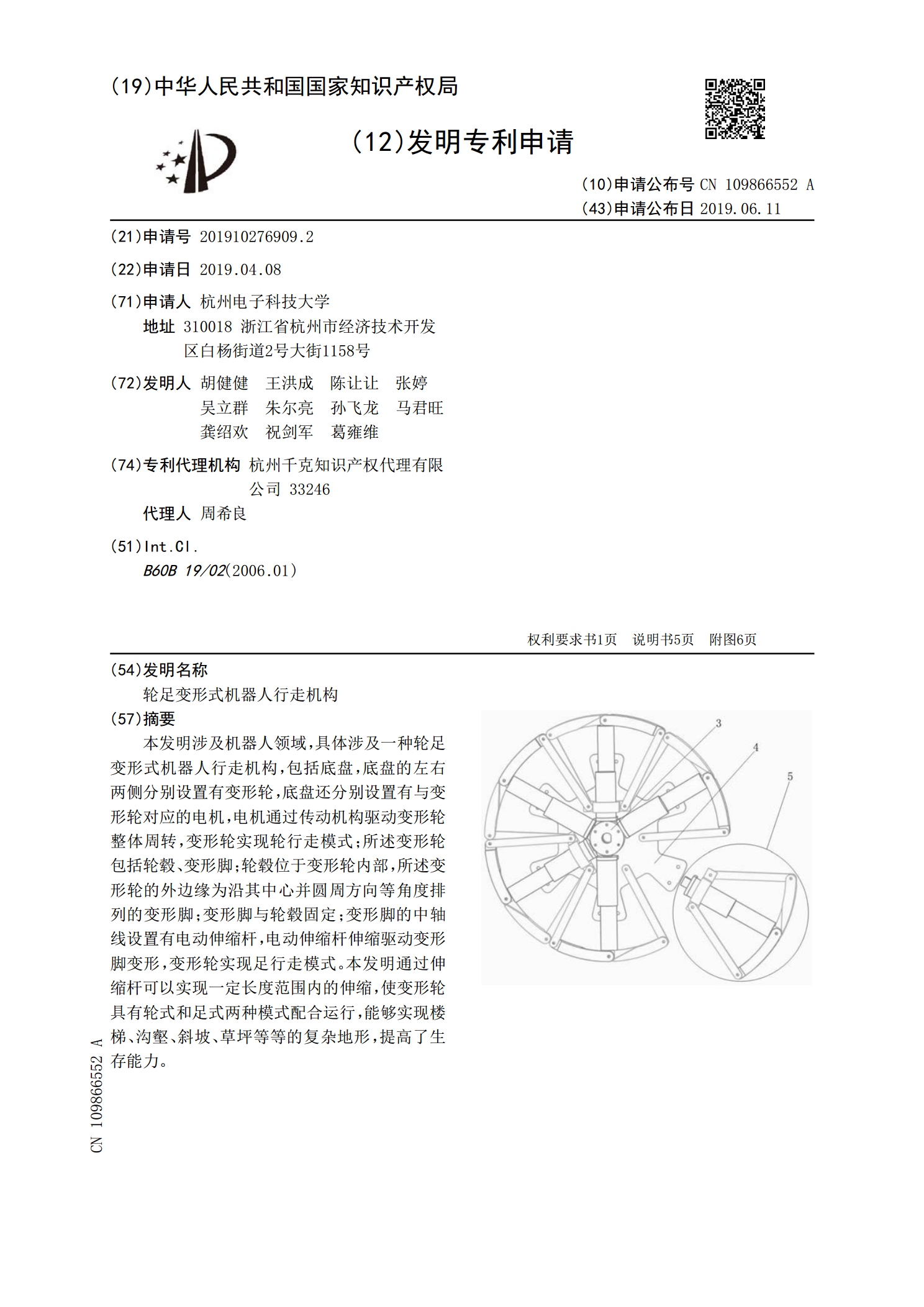
轮足变形式机器人行走机构.pdf
本发明涉及机器人领域,具体涉及一种轮足变形式机器人行走机构,包括底盘,底盘的左右两侧分别设置有变形轮,底盘还分别设置有与变形轮对应的电机,电机通过传动机构驱动变形轮整体周转,变形轮实现轮行走模式;所述变形轮包括轮毂、变形脚;轮毂位于变形轮内部,所述变形轮的外边缘为沿其中心并圆周方向等角度排列的变形脚;变形脚与轮毂固定;变形脚的中轴线设置有电动伸缩杆,电动伸缩杆伸缩驱动变形脚变形,变形轮实现足行走模式。本发明通过伸缩杆可以实现一定长度范围内的伸缩,使变形轮具有轮式和足式两种模式配合运行,能够实现楼梯、沟壑、