
基于轮毂分布式驱动方式的车轮定位参数的确定方法.pdf

一只****爱敏

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于轮毂分布式驱动方式的车轮定位参数的确定方法.pdf
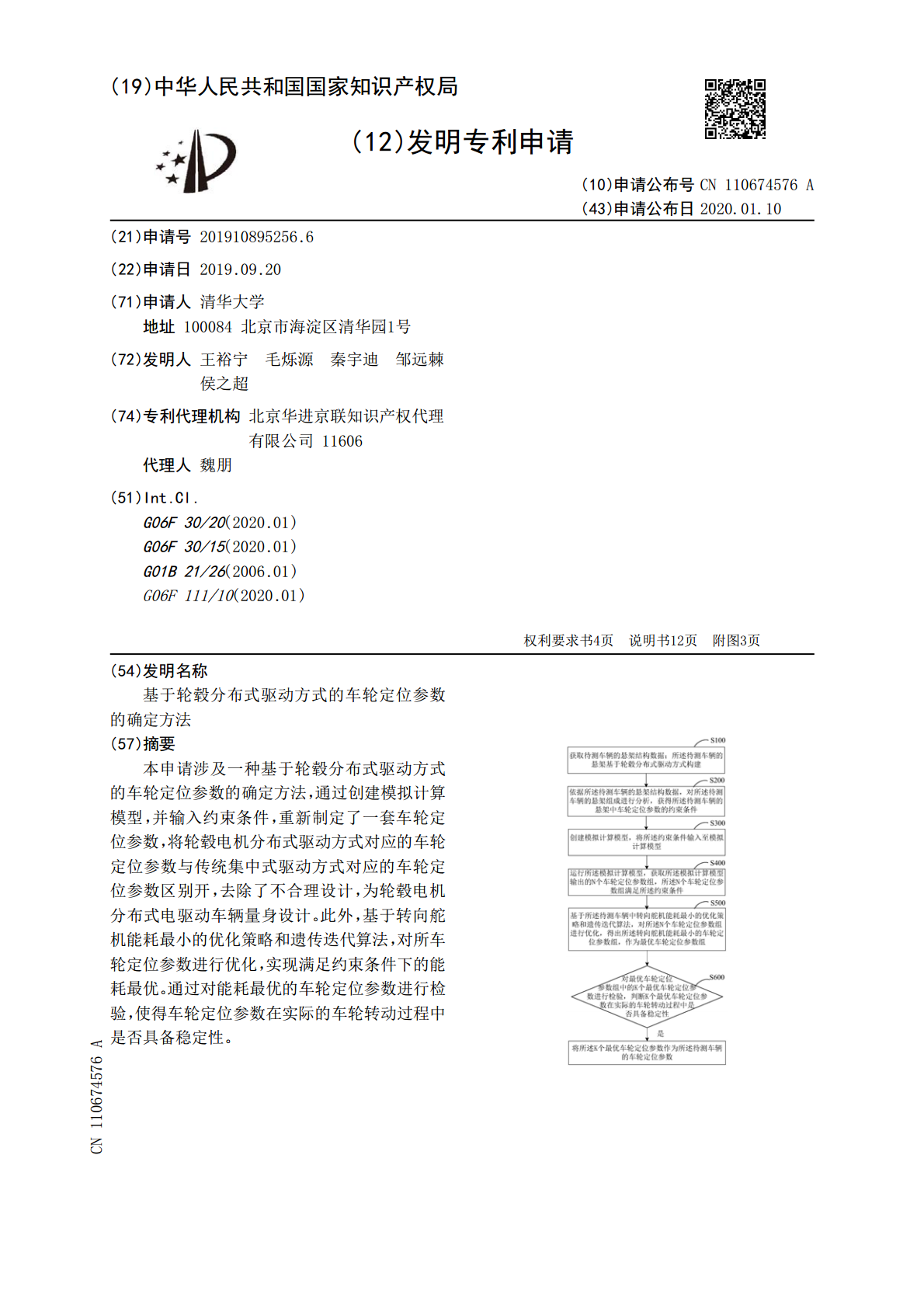
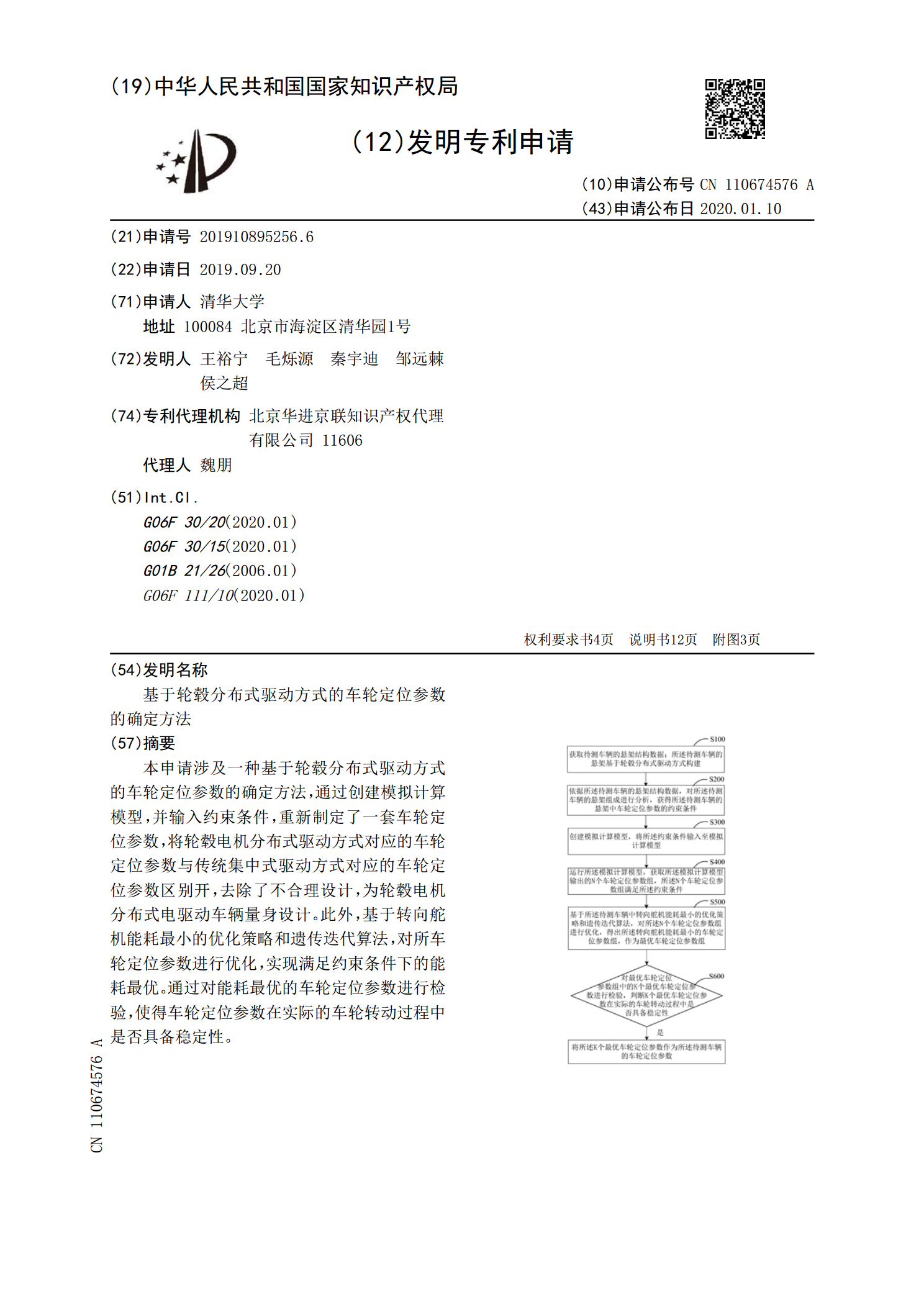
本申请涉及一种基于轮毂分布式驱动方式的车轮定位参数的确定方法,通过创建模拟计算模型,并输入约束条件,重新制定了一套车轮定位参数,将轮毂电机分布式驱动方式对应的车轮定位参数与传统集中式驱动方式对应的车轮定位参数区别开,去除了不合理设计,为轮毂电机分布式电驱动车辆量身设计。此外,基于转向舵机能耗最小的优化策略和遗传迭代算法,对所车轮定位参数进行优化,实现满足约束条件下的能耗最优。通过对能耗最优的车轮定位参数进行检验,使得车轮定位参数在实际的车轮转动过程中是否具备稳定性。
用于确定车轮定位参数的方法.pdf
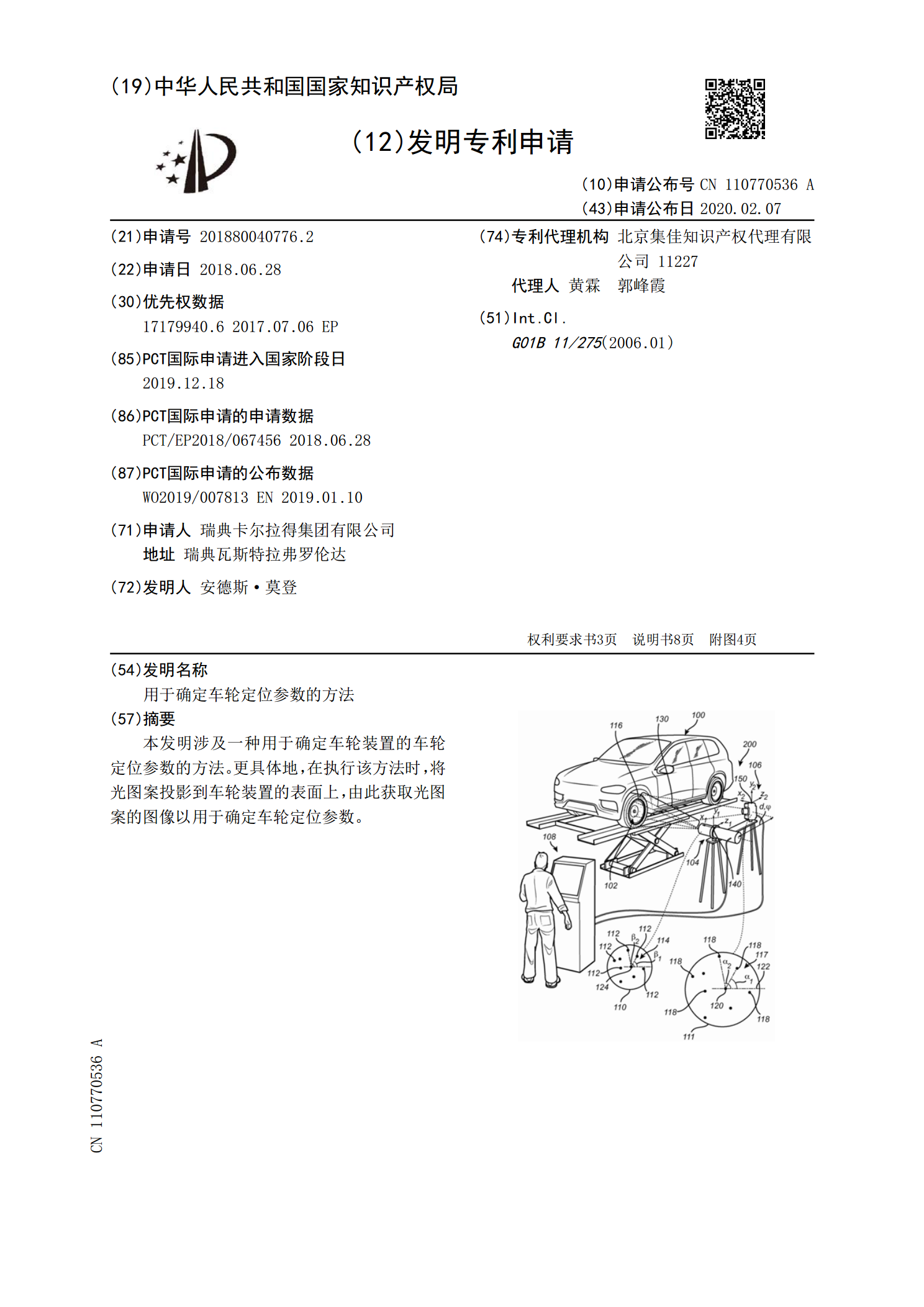
本发明涉及一种用于确定车轮装置的车轮定位参数的方法。更具体地,在执行该方法时,将光图案投影到车轮装置的表面上,由此获取光图案的图像以用于确定车轮定位参数。
一种基于视觉的汽车轮毂定位方法.pdf
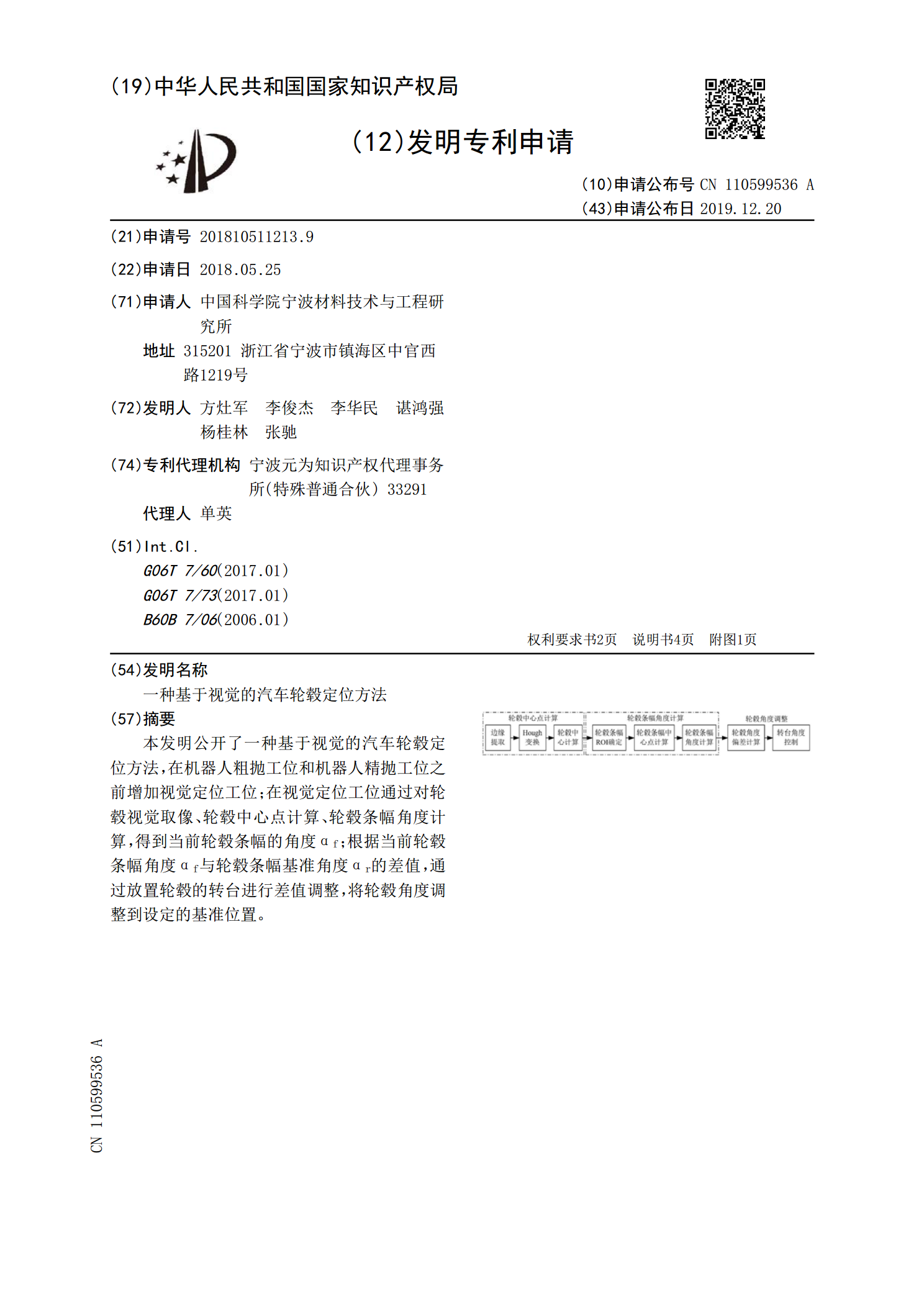
本发明公开了一种基于视觉的汽车轮毂定位方法,在机器人粗抛工位和机器人精抛工位之前增加视觉定位工位;在视觉定位工位通过对轮毂视觉取像、轮毂中心点计算、轮毂条幅角度计算,得到当前轮毂条幅的角度α
基于轮毂电机转速信号的分布式驱动汽车稳定控制方法.pdf
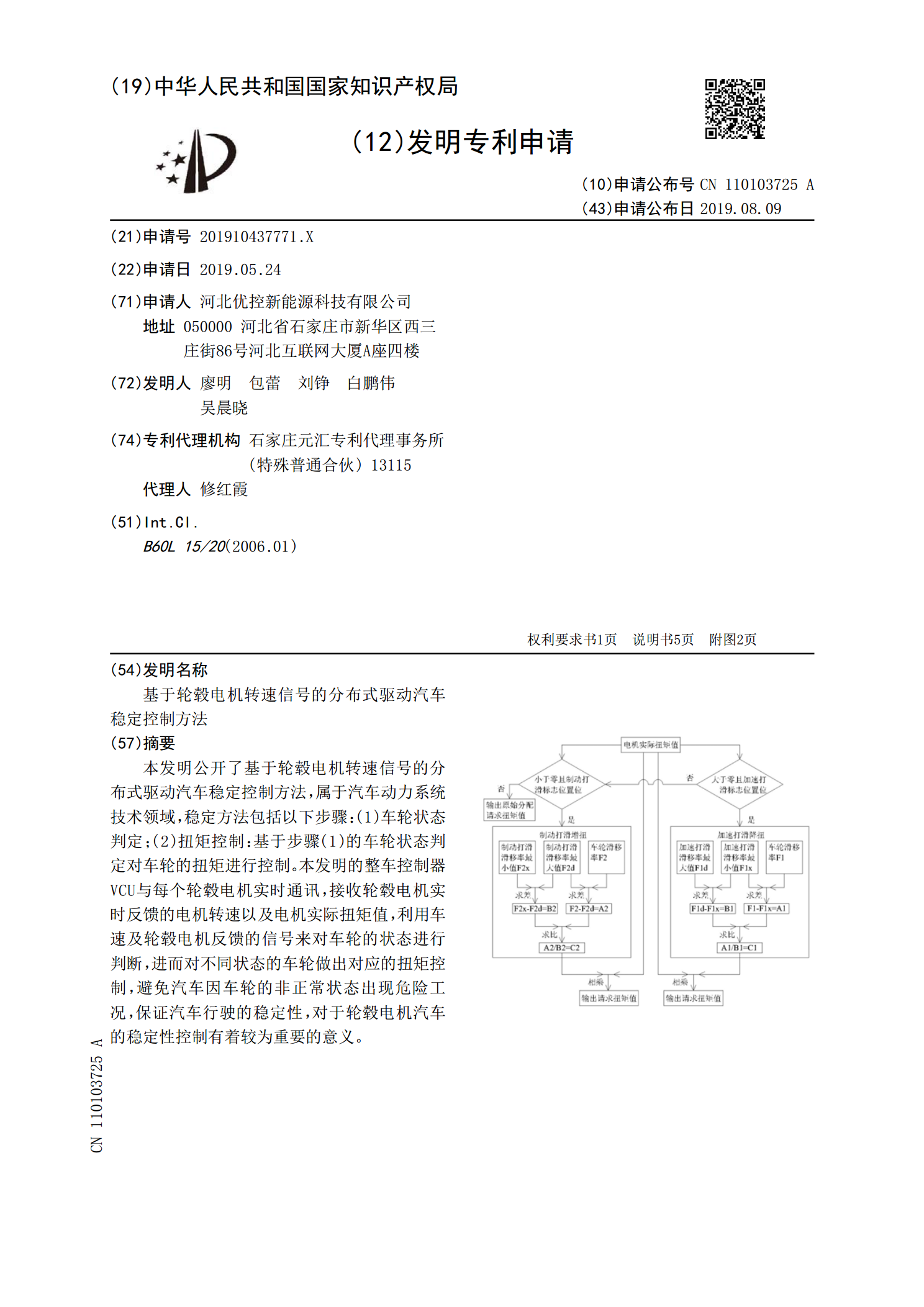
本发明公开了基于轮毂电机转速信号的分布式驱动汽车稳定控制方法,属于汽车动力系统技术领域,稳定方法包括以下步骤:(1)车轮状态判定;(2)扭矩控制:基于步骤(1)的车轮状态判定对车轮的扭矩进行控制。本发明的整车控制器VCU与每个轮毂电机实时通讯,接收轮毂电机实时反馈的电机转速以及电机实际扭矩值,利用车速及轮毂电机反馈的信号来对车轮的状态进行判断,进而对不同状态的车轮做出对应的扭矩控制,避免汽车因车轮的非正常状态出现危险工况,保证汽车行驶的稳定性,对于轮毂电机汽车的稳定性控制有着较为重要的意义。
汽车轮定位参数.ppt
汽车四轮定位参数主销后倾角主销后倾角的调整手段:垫片,偏心凸轮,长孔,支柱杆,偏心球头等。如果外倾角和后倾角同时需要调整,要先调整后倾角再调整外倾角。车轮外倾角外倾角调整手段:垫片,偏心凸轮,长孔,球头旋转,支柱旋转,调整轴承等。主销内倾角前束调整前轮前束时,应先将后轮前束调整好。前轮前束的调整方法:调整可调式拉杆,在调整前先将左右两边球头锁止螺栓松开,夹紧转向盘正中位置。如何确保汽车行驶的稳定性?Conclusion