
姿态测量方法及装置.pdf

努力****元恺

1/10
2/10
3/10
4/10
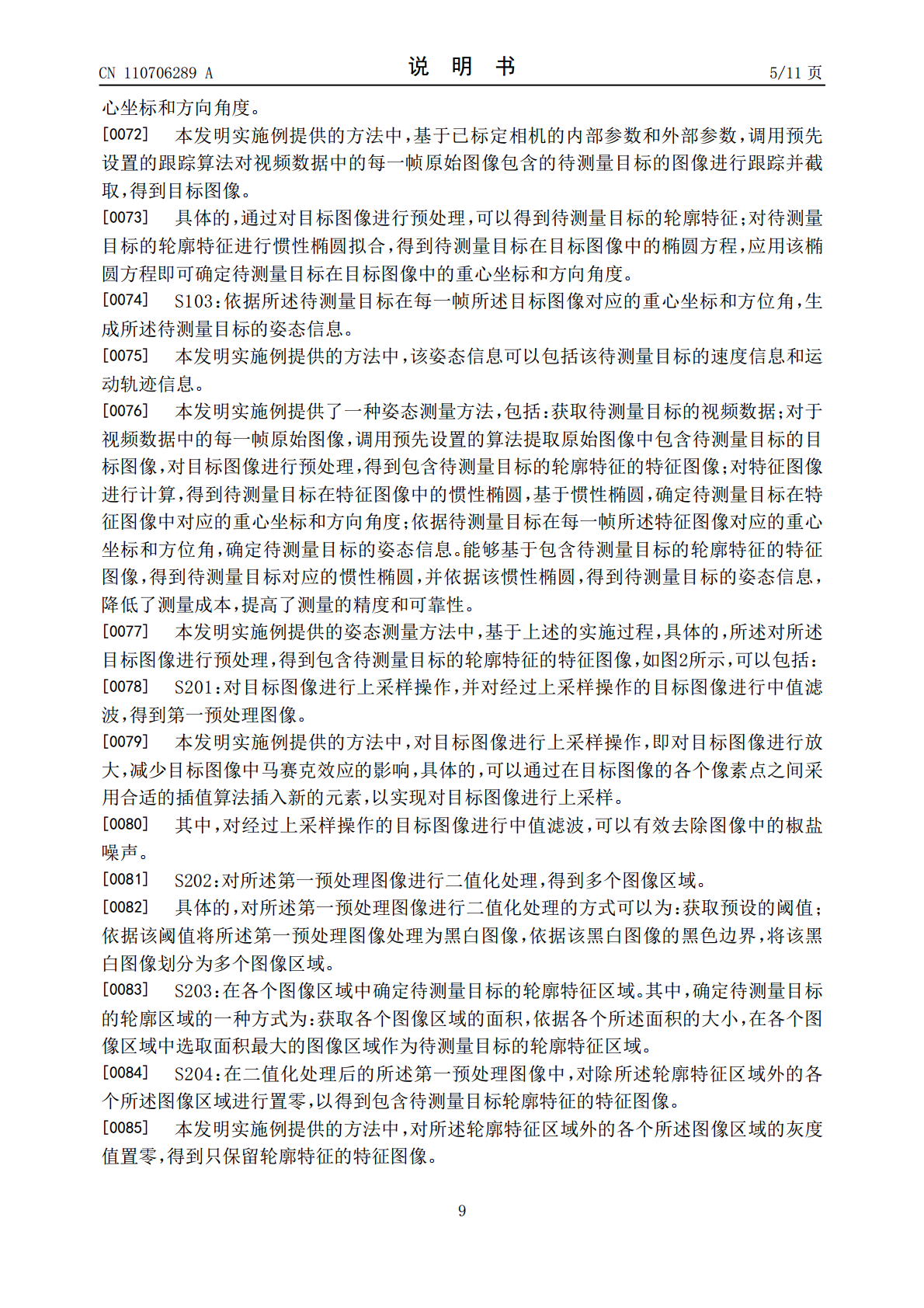
5/10
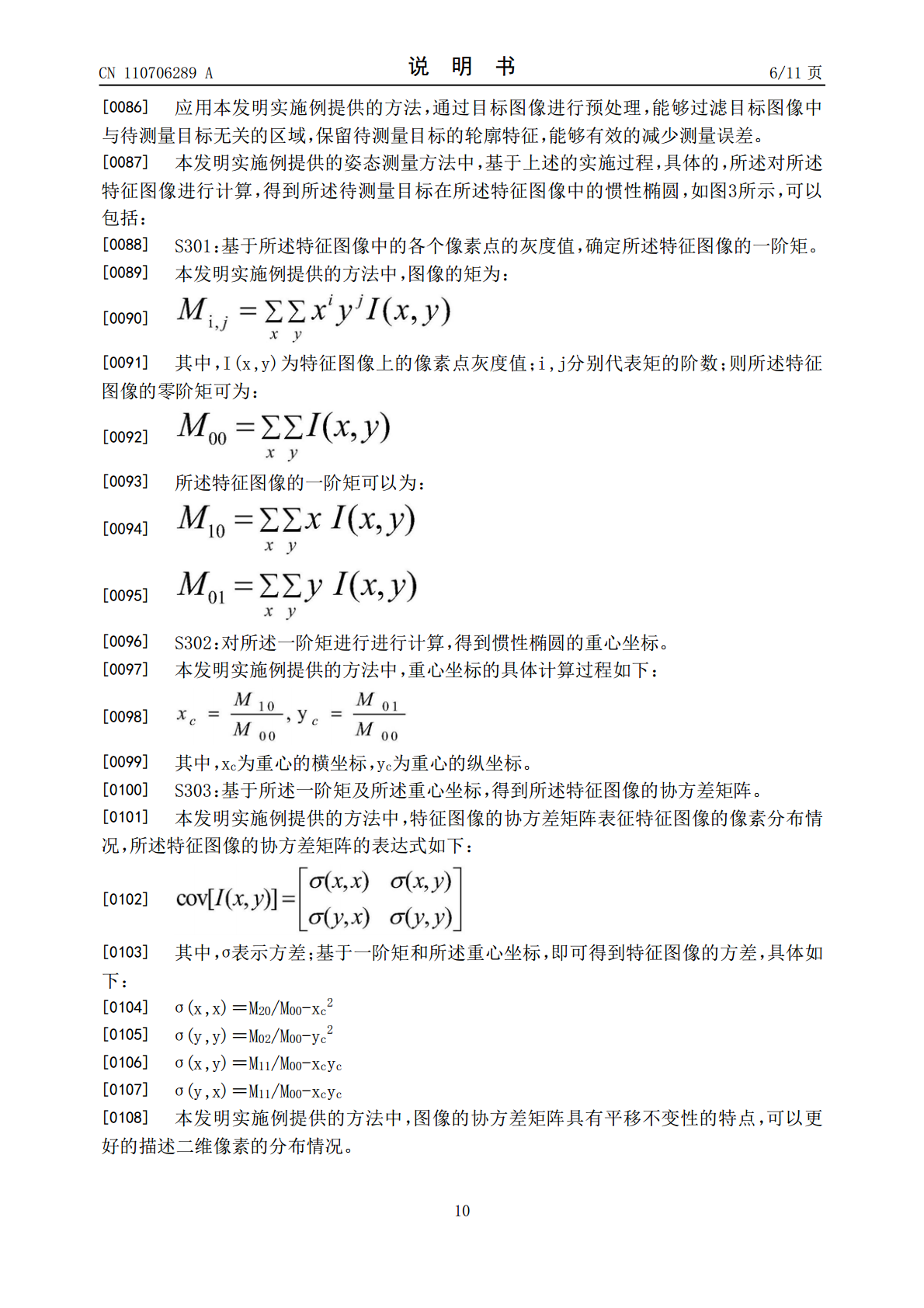
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
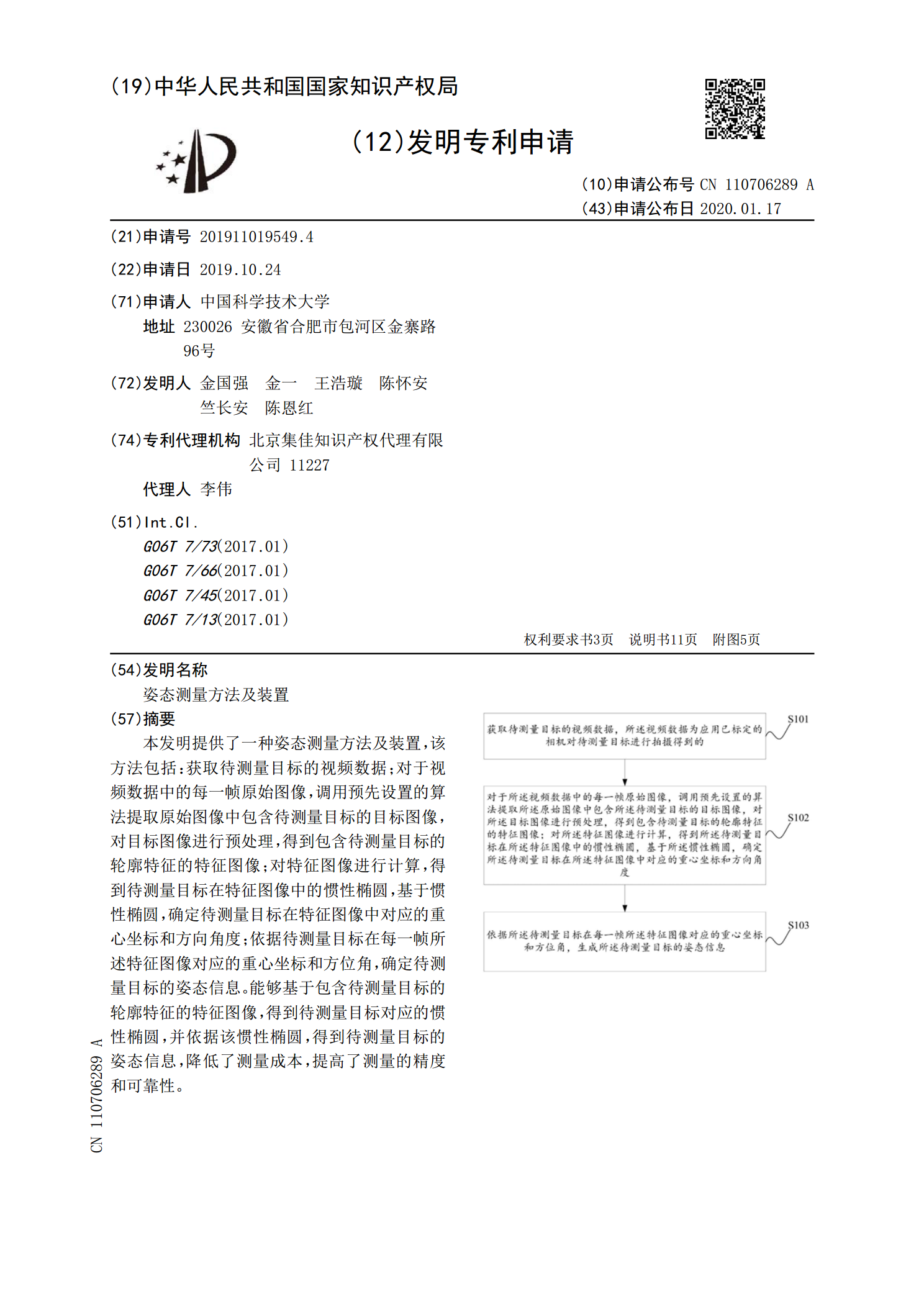
姿态测量方法及装置.pdf
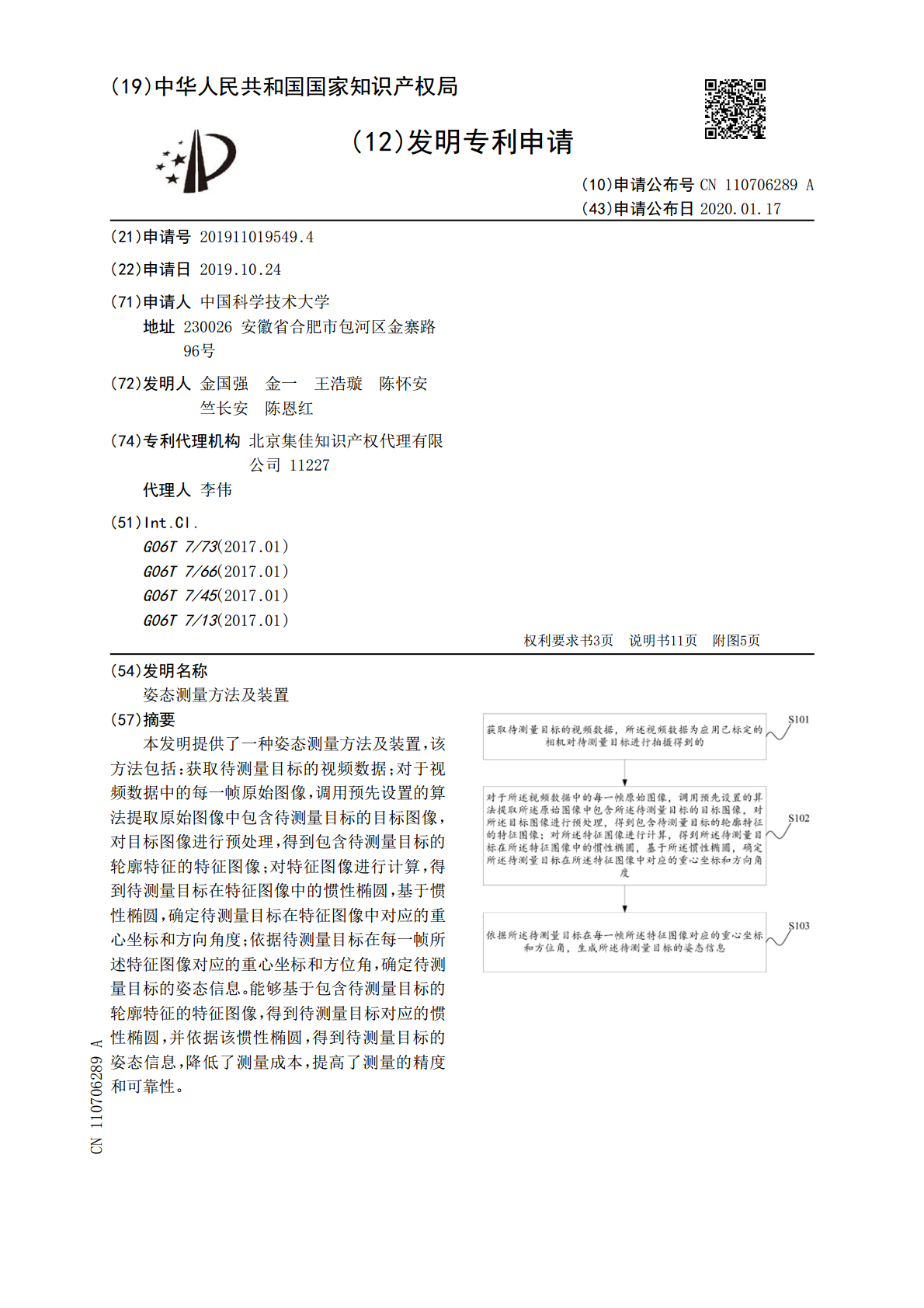
本发明提供了一种姿态测量方法及装置,该方法包括:获取待测量目标的视频数据;对于视频数据中的每一帧原始图像,调用预先设置的算法提取原始图像中包含待测量目标的目标图像,对目标图像进行预处理,得到包含待测量目标的轮廓特征的特征图像;对特征图像进行计算,得到待测量目标在特征图像中的惯性椭圆,基于惯性椭圆,确定待测量目标在特征图像中对应的重心坐标和方向角度;依据待测量目标在每一帧所述特征图像对应的重心坐标和方位角,确定待测量目标的姿态信息。能够基于包含待测量目标的轮廓特征的特征图像,得到待测量目标对应的惯性椭圆,并

一种姿态测量方法和装置.pdf
本发明提供一种姿态测量方法和装置,加载目标模型,还包括:接收至少两帧目标图像,并提取每一帧目标图像中的目标轮廓序列;获取所述目标模型的目标投影图像,并提取所述目标投影图像中的模拟目标轮廓序列;循环执行N1至N3,直至所述每一帧目标图像对应的目标姿态均被确定:N1:将当前模拟目标轮廓序列与当前帧的目标轮廓序列进行匹配;N2:确定匹配后的模拟目标轮廓序列对应的目标模型姿态为目标姿态;N3:判断当前帧是否为最后一帧,如果否,则将当前帧对应的目标姿态作为下一帧的模拟目标轮廓序列的初始姿态,并将下一帧作为当前帧,执

载体姿态数据测量方法、装置以及电子设备.pdf
本发明提供了一种载体姿态数据测量方法、装置以及电子设备,涉及载体姿态测量技术领域,载体姿态测量方法包括:获取目标物体上的主天线信号和副天线信号;对所述主天线信号进行基带处理,得到主天线观测量;基于所述主天线观测量通过拉偏码片、载波相位以及多普勒,对所述副天线信号进行跟踪,得到副天线观测量;对所述主天线观测量和所述副天线观测量进行解算,得到目标物体的姿态数据,解决了现有技术中存在的测姿过程使用资源较多、功耗较高的技术问题,能缩短首次测姿时间、提高测姿精度和可用性。

轨道检测系统所在构架的运动姿态测量方法及装置.pdf
本发明公开了一种轨道检测系统所在构架的运动姿态测量方法及装置,其中该方法包括:获取多个三轴加速度计所采集的构架运动加速度数据;所述多个三轴加速度计,对称安装于轨道检测系统所在轨道检测车辆的构架的左右两侧;所述左右两侧为平行于车辆行进方向的车身两侧;针对每一三轴加速度计,根据该三轴加速度计所采集的加速度数据,计算该三轴加速度计的三轴位移数据;对多个三轴加速度计的三轴位移数据,进行解算处理,得到轨道检测系统所在构架几何中心的运动姿态测量数据;所述构架几何中心的运动姿态测量数据,包括构架几何中心的位移量和转角量
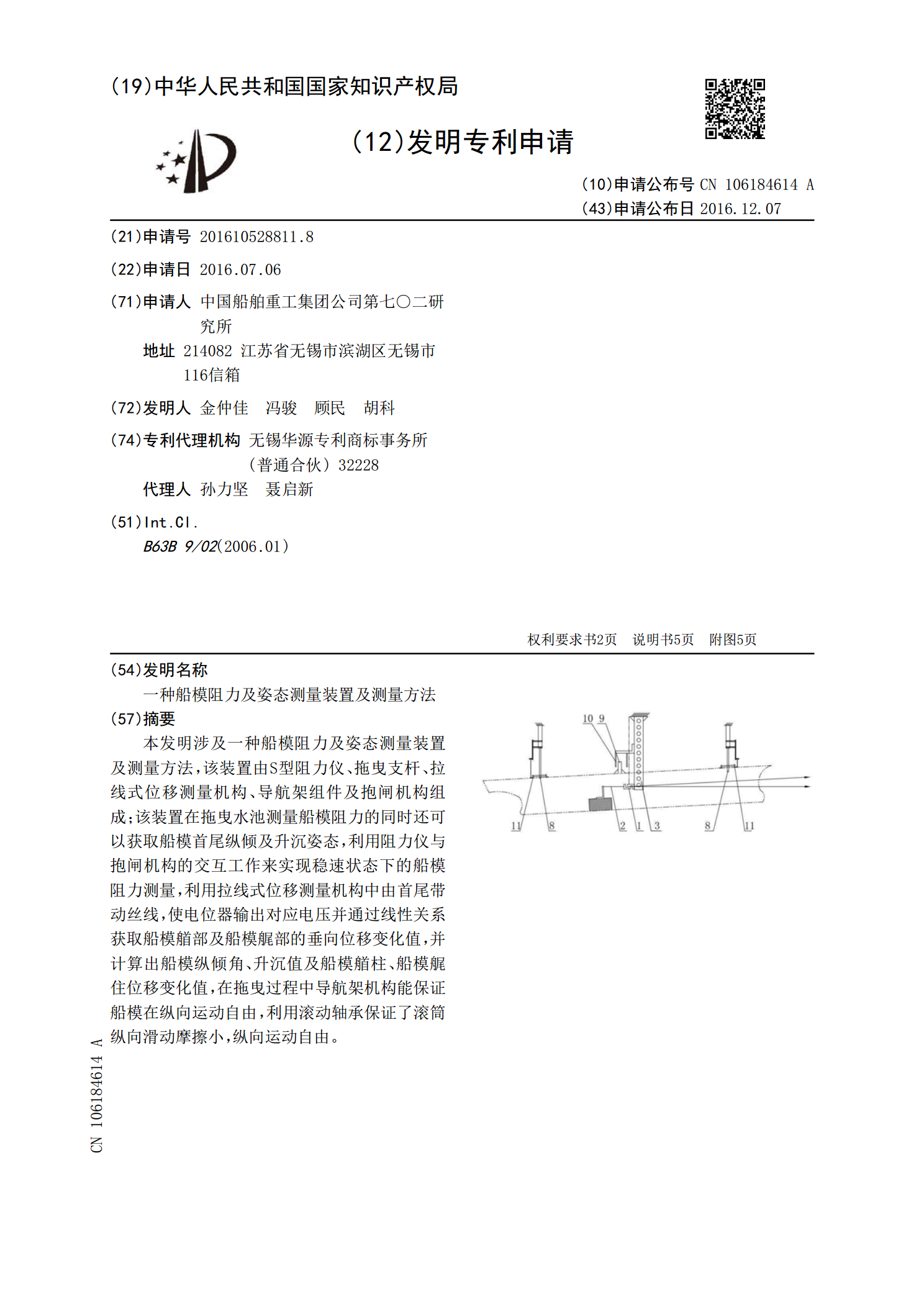
一种船模阻力及姿态测量装置及测量方法.pdf
本发明涉及一种船模阻力及姿态测量装置及测量方法,该装置由S型阻力仪、拖曳支杆、拉线式位移测量机构、导航架组件及抱闸机构组成;该装置在拖曳水池测量船模阻力的同时还可以获取船模首尾纵倾及升沉姿态,利用阻力仪与抱闸机构的交互工作来实现稳速状态下的船模阻力测量,利用拉线式位移测量机构中由首尾带动丝线,使电位器输出对应电压并通过线性关系获取船模艏部及船模艉部的垂向位移变化值,并计算出船模纵倾角、升沉值及船模艏柱、船模艉住位移变化值,在拖曳过程中导航架机构能保证船模在纵向运动自由,利用滚动轴承保证了滚筒纵向滑动摩擦小