
一种展示摆线齿和针齿啮合对数的RV减速器及展示方法.pdf

书錦****by


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种展示摆线齿和针齿啮合对数的RV减速器及展示方法.pdf
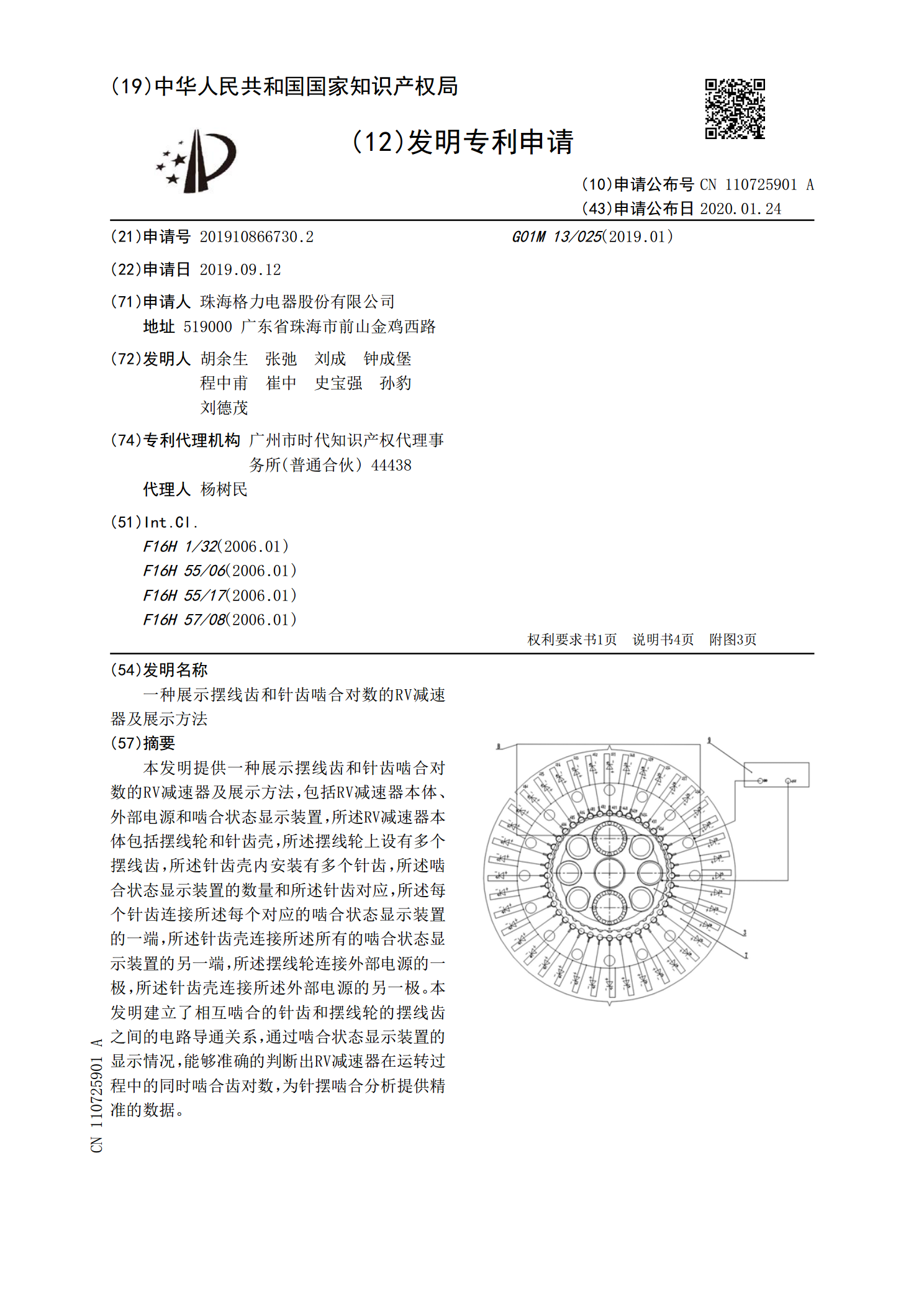
本发明提供一种展示摆线齿和针齿啮合对数的RV减速器及展示方法,包括RV减速器本体、外部电源和啮合状态显示装置,所述RV减速器本体包括摆线轮和针齿壳,所述摆线轮上设有多个摆线齿,所述针齿壳内安装有多个针齿,所述啮合状态显示装置的数量和所述针齿对应,所述每个针齿连接所述每个对应的啮合状态显示装置的一端,所述针齿壳连接所述所有的啮合状态显示装置的另一端,所述摆线轮连接外部电源的一极,所述针齿壳连接所述外部电源的另一极。本发明建立了相互啮合的针齿和摆线轮的摆线齿之间的电路导通关系,通过啮合状态显示装置的显示情况,

一种展示摆线齿和针齿润滑状态的RV减速器及展示方法.pdf
本发明提供一种展示摆线齿和针齿润滑状态的RV减速器及展示方法,包括RV减速器本体和多个振荡电路,所述RV减速器本体包括摆线轮和针齿壳,所述摆线轮上设有多个摆线齿,所述针齿壳内安装有多个针齿,所述振荡电路和所述针齿数量一致,所述针齿的一端与所述振荡电路的一端一一对应连接,所有的所述振荡电路的另一端连接至所述摆线轮,所述振荡电路包括有显示装置,根据所述显示装置的显示状况判断所述针齿和所述摆线齿之间的润滑状态。本发明通过电路振荡的方式判断摆线齿和针齿间润滑油膜的存在状态,通过显示装置能够直接表达出RV减速器摆线

一种行星摆线减速器针齿壳内齿加工方法.pdf
本发明涉及一种行星摆线减速器针齿壳内齿加工方法,包括以下步骤:⑴.准备好一个已成环形的针齿壳坯体,采用插齿方法加工出一圈均布分布的半圆,单边留0.2‑0.3mm加工余量;⑵.采用内齿磨削方法,磨削半圆孔,单边留0.01‑0.02mm加工余量;⑶.采用豪克能专用加工刀具,进行超声强化半圆孔内表面,采用粗强化‑半精强化‑精强化的方式,达到尺寸要求。本发明提供了一种成型简便、精度更高、表面硬度更高、使用寿命更长的三步法内齿加工方法。解决了现有行星摆线减速器针齿壳内齿加工方法的问题,尤其适合加工行星摆线减速器壳体

RV传动中摆线轮啮合齿数分析.docx
RV传动中摆线轮啮合齿数分析摆线轮传动是一种用于转矩传递的传动装置,其主要特点是精度高、可靠性好、噪声低等特点,因此被广泛应用于机床、轮船、汽车等领域。在摆线轮传动中,摆线轮啮合齿数是一个非常关键的参数,其大小直接影响传动的性能和使用寿命。一、摆线轮传动的工作原理摆线轮传动是一种齿轮传动,其主要由摆线轮和端铣器两部分组成。端铣器为一个直杆,一端固定在机座上,另一端在摆动轮的作用下沿着周期性直线运动,并通过齿轮传递力矩。摆动轮为一种带有摆动机构和啮合齿轮的齿轮,其形状呈椭圆形或心形,特点是啮合齿轮数量少、形
一种摆线针齿谐波减速器.pdf
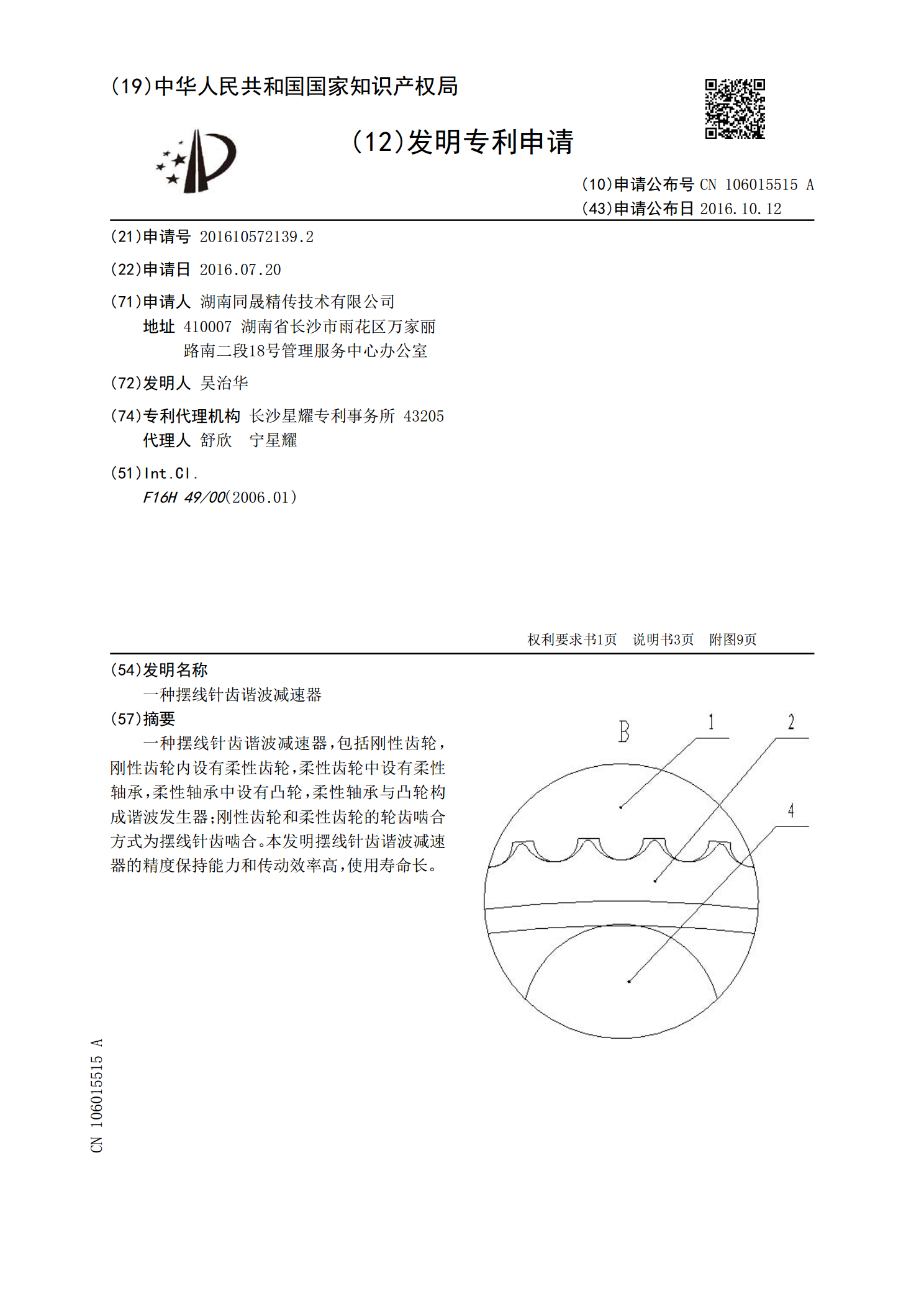
一种摆线针齿谐波减速器,包括刚性齿轮,刚性齿轮内设有柔性齿轮,柔性齿轮中设有柔性轴承,柔性轴承中设有凸轮,柔性轴承与凸轮构成谐波发生器;刚性齿轮和柔性齿轮的轮齿啮合方式为摆线针齿啮合。本发明摆线针齿谐波减速器的精度保持能力和传动效率高,使用寿命长。