
用于为主车辆提供干预转向动作以避免碰撞的方法和系统.pdf

论文****可爱

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于为主车辆提供干预转向动作以避免碰撞的方法和系统.pdf
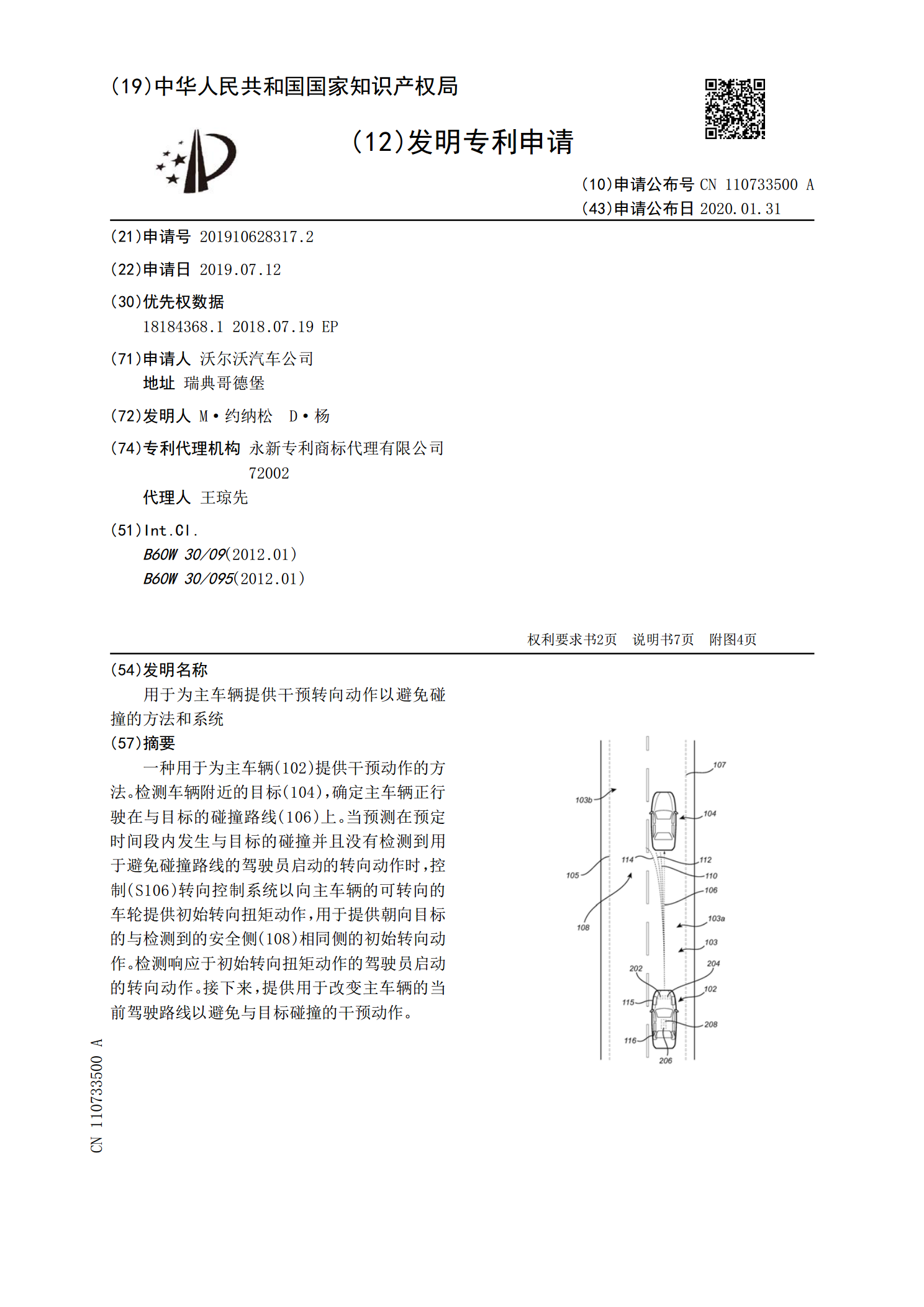
一种用于为主车辆(102)提供干预动作的方法。检测车辆附近的目标(104),确定主车辆正行驶在与目标的碰撞路线(106)上。当预测在预定时间段内发生与目标的碰撞并且没有检测到用于避免碰撞路线的驾驶员启动的转向动作时,控制(S106)转向控制系统以向主车辆的可转向的车轮提供初始转向扭矩动作,用于提供朝向目标的与检测到的安全侧(108)相同侧的初始转向动作。检测响应于初始转向扭矩动作的驾驶员启动的转向动作。接下来,提供用于改变主车辆的当前驾驶路线以避免与目标碰撞的干预动作。
用于车辆的碰撞避免方法及系统.pdf
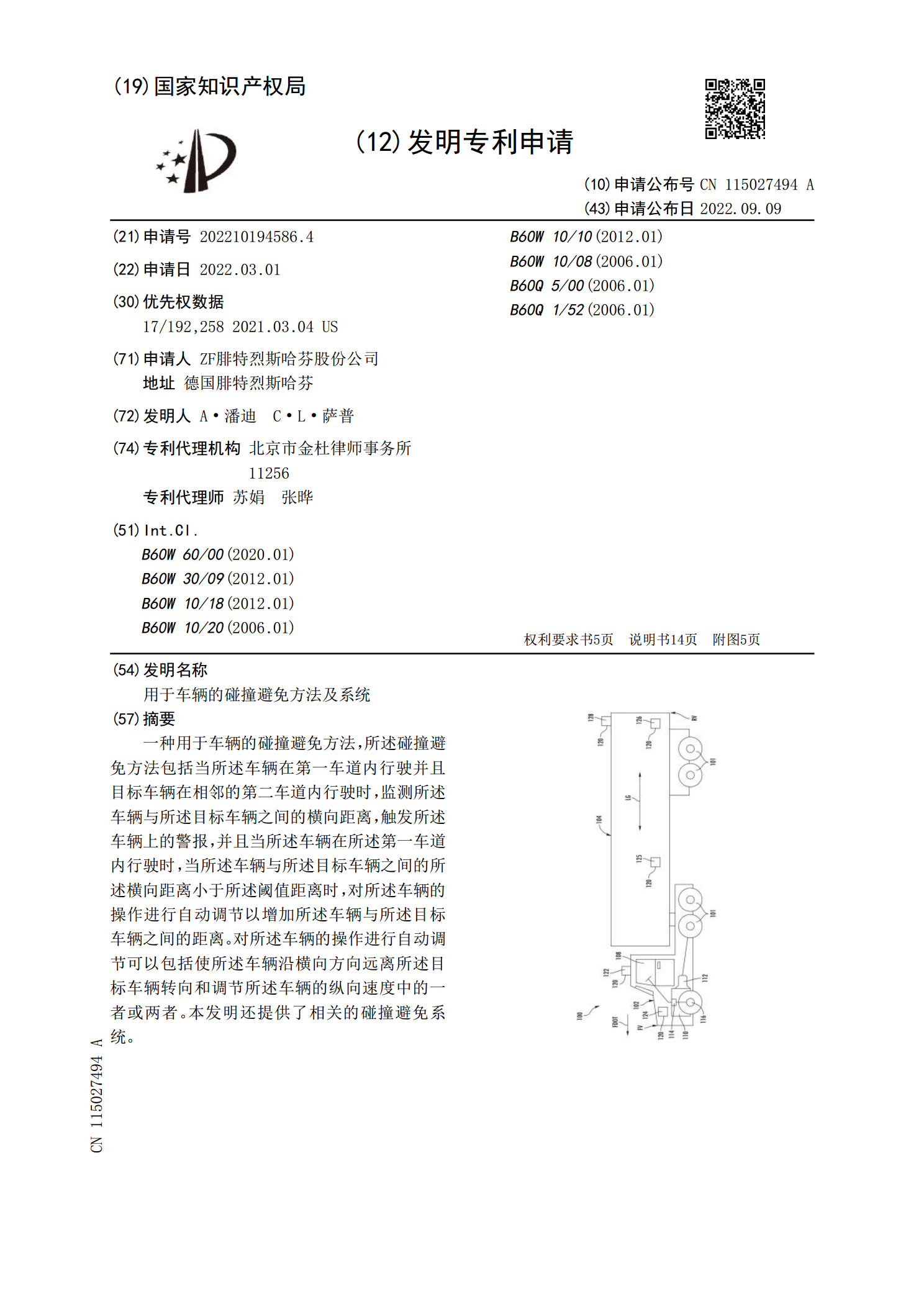
一种用于车辆的碰撞避免方法,所述碰撞避免方法包括当所述车辆在第一车道内行驶并且目标车辆在相邻的第二车道内行驶时,监测所述车辆与所述目标车辆之间的横向距离,触发所述车辆上的警报,并且当所述车辆在所述第一车道内行驶时,当所述车辆与所述目标车辆之间的所述横向距离小于所述阈值距离时,对所述车辆的操作进行自动调节以增加所述车辆与所述目标车辆之间的距离。对所述车辆的操作进行自动调节可以包括使所述车辆沿横向方向远离所述目标车辆转向和调节所述车辆的纵向速度中的一者或两者。本发明还提供了相关的碰撞避免系统。
车辆与行人碰撞避免的方法和系统.pdf
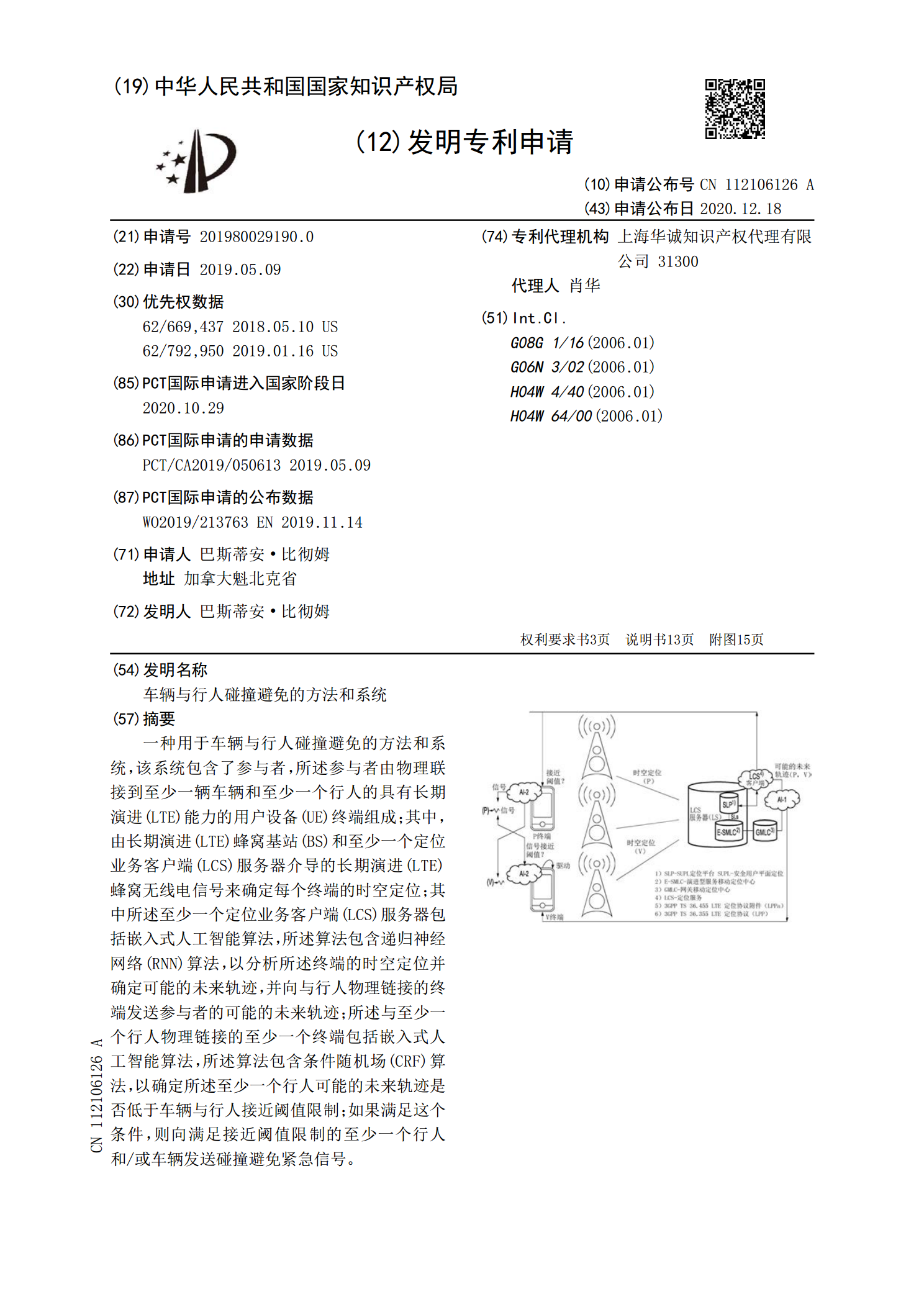
一种用于车辆与行人碰撞避免的方法和系统,该系统包含了参与者,所述参与者由物理联接到至少一辆车辆和至少一个行人的具有长期演进(LTE)能力的用户设备(UE)终端组成;其中,由长期演进(LTE)蜂窝基站(BS)和至少一个定位业务客户端(LCS)服务器介导的长期演进(LTE)蜂窝无线电信号来确定每个终端的时空定位;其中所述至少一个定位业务客户端(LCS)服务器包括嵌入式人工智能算法,所述算法包含递归神经网络(RNN)算法,以分析所述终端的时空定位并确定可能的未来轨迹,并向与行人物理链接的终端发送参与者的可能的未

用于使车辆转向的转向系统和方法.pdf
一种在驾驶车辆时响应于一个事件而脱开车辆的车轮组件的转向系统。该转向系统包括悬架节、转向横拉杆和拉出器。该拉出器包括连接器,该连接器将悬架节与转向横拉杆可拆卸地接合以使该悬架节与该转向横拉杆互连。该拉出器能够响应于该事件而移动连接器以使该连接器从悬架节和转向横拉杆中的至少一个脱开。当驾驶车辆时车辆沿纵向轴线运行并且感测到绕纵向轴线的车辆力矩。如果该力矩超过一定阈值,则拉出器被激励以使悬架节从转向横拉杆脱开。
用于提供触觉反馈的车辆和车辆转向系统.pdf
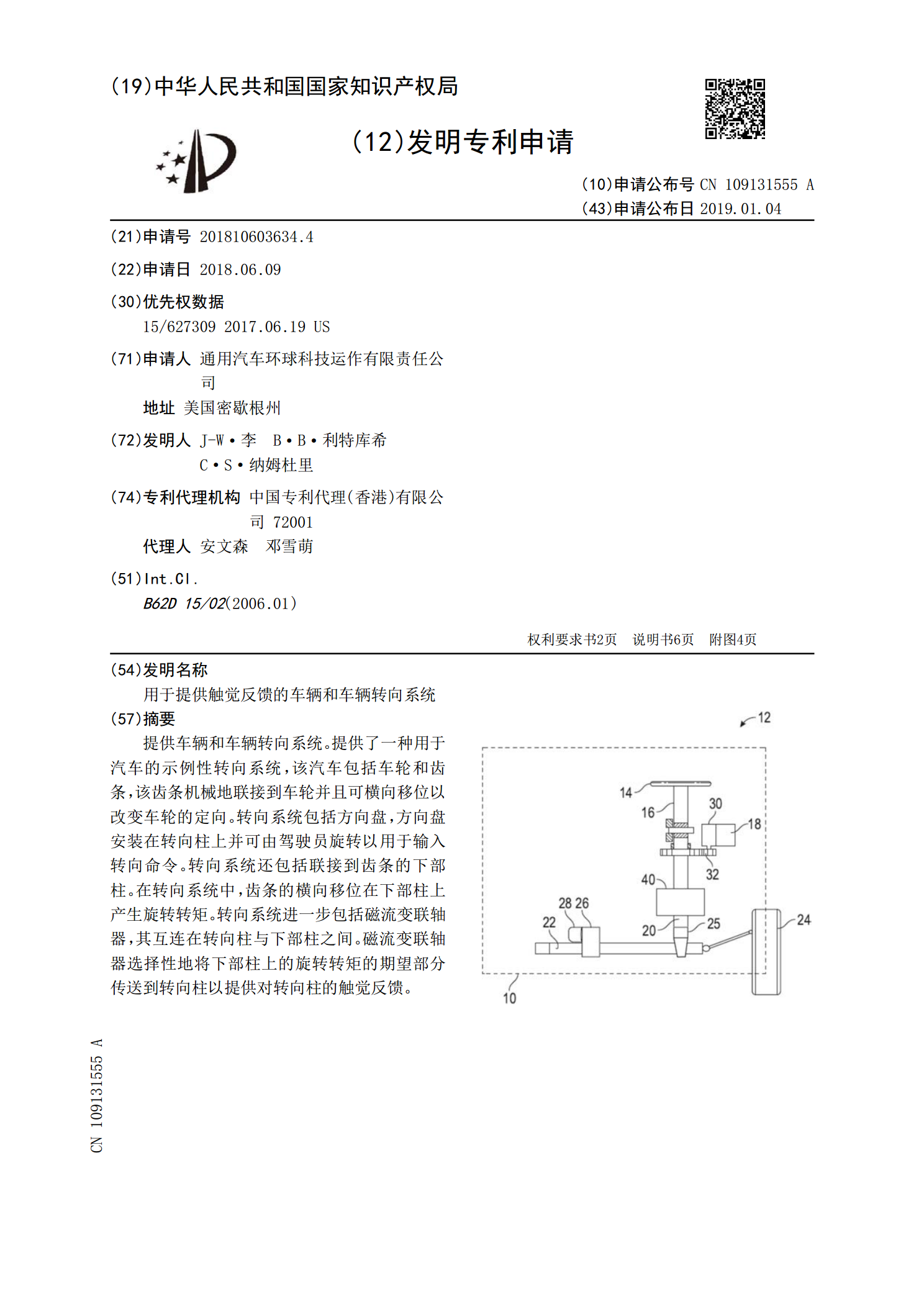
提供车辆和车辆转向系统。提供了一种用于汽车的示例性转向系统,该汽车包括车轮和齿条,该齿条机械地联接到车轮并且可横向移位以改变车轮的定向。转向系统包括方向盘,方向盘安装在转向柱上并可由驾驶员旋转以用于输入转向命令。转向系统还包括联接到齿条的下部柱。在转向系统中,齿条的横向移位在下部柱上产生旋转转矩。转向系统进一步包括磁流变联轴器,其互连在转向柱与下部柱之间。磁流变联轴器选择性地将下部柱上的旋转转矩的期望部分传送到转向柱以提供对转向柱的触觉反馈。