
用于车辆的碰撞避免方法及系统.pdf

茂学****23

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于车辆的碰撞避免方法及系统.pdf
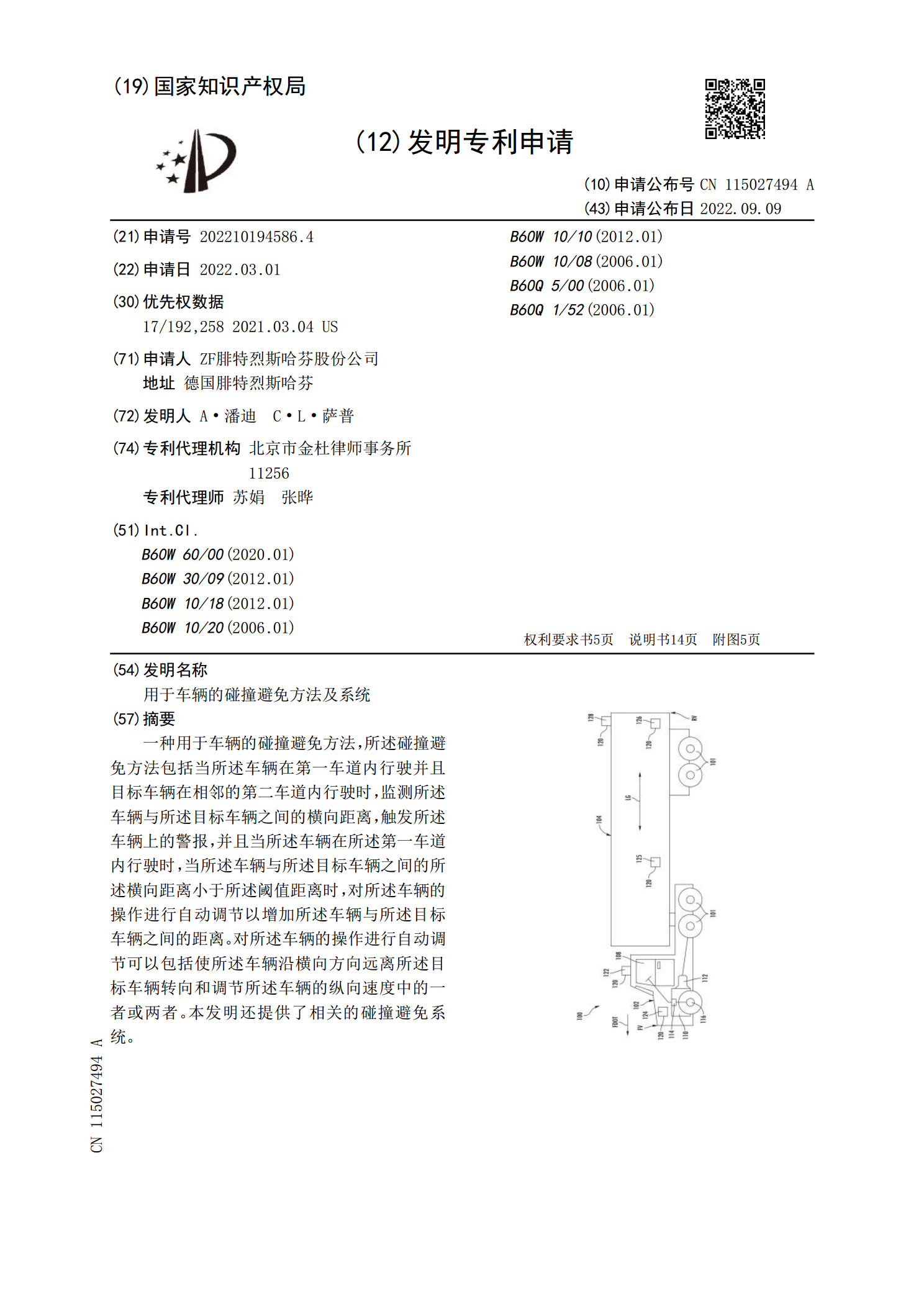
一种用于车辆的碰撞避免方法,所述碰撞避免方法包括当所述车辆在第一车道内行驶并且目标车辆在相邻的第二车道内行驶时,监测所述车辆与所述目标车辆之间的横向距离,触发所述车辆上的警报,并且当所述车辆在所述第一车道内行驶时,当所述车辆与所述目标车辆之间的所述横向距离小于所述阈值距离时,对所述车辆的操作进行自动调节以增加所述车辆与所述目标车辆之间的距离。对所述车辆的操作进行自动调节可以包括使所述车辆沿横向方向远离所述目标车辆转向和调节所述车辆的纵向速度中的一者或两者。本发明还提供了相关的碰撞避免系统。
车辆与行人碰撞避免的方法和系统.pdf
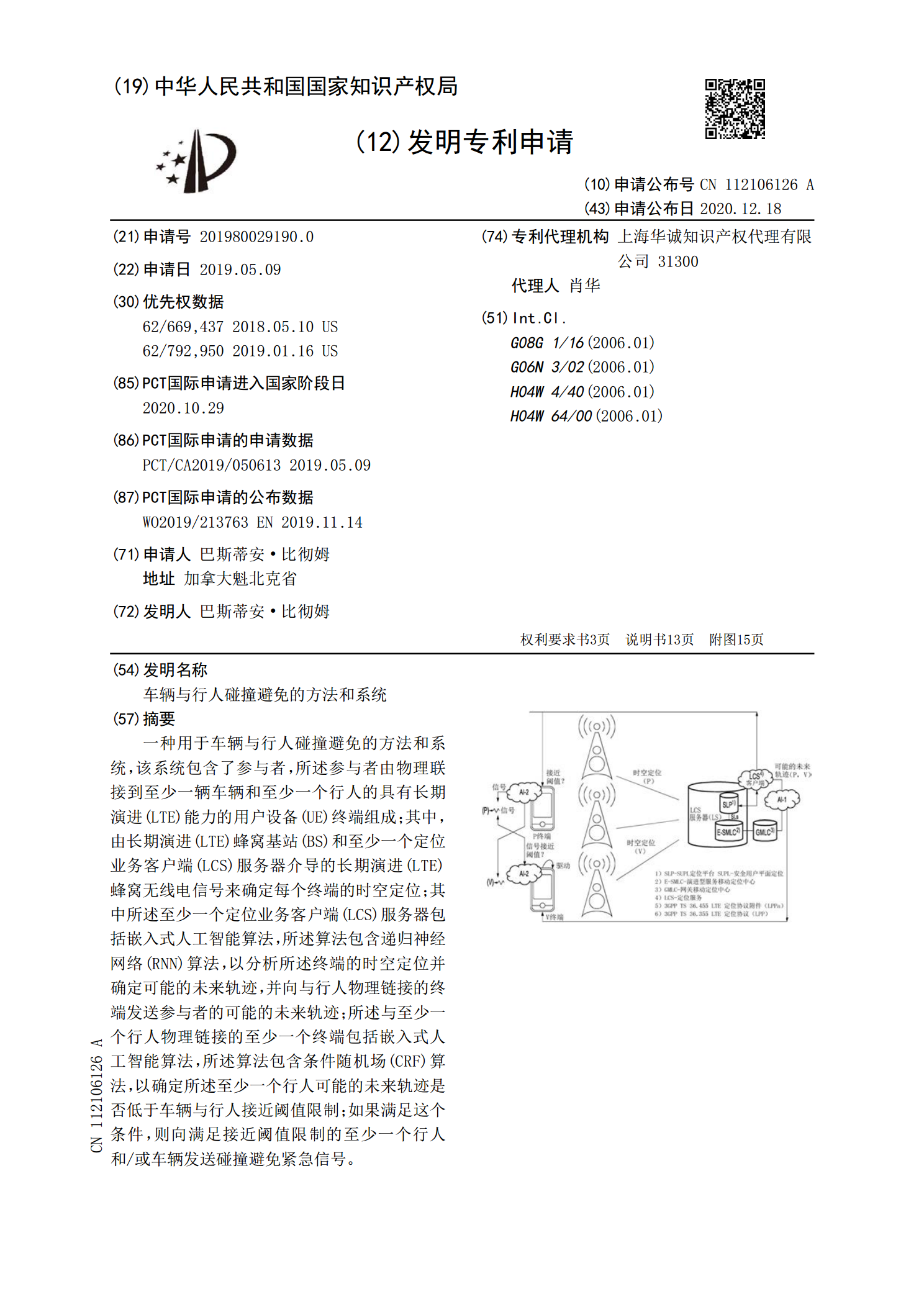
一种用于车辆与行人碰撞避免的方法和系统,该系统包含了参与者,所述参与者由物理联接到至少一辆车辆和至少一个行人的具有长期演进(LTE)能力的用户设备(UE)终端组成;其中,由长期演进(LTE)蜂窝基站(BS)和至少一个定位业务客户端(LCS)服务器介导的长期演进(LTE)蜂窝无线电信号来确定每个终端的时空定位;其中所述至少一个定位业务客户端(LCS)服务器包括嵌入式人工智能算法,所述算法包含递归神经网络(RNN)算法,以分析所述终端的时空定位并确定可能的未来轨迹,并向与行人物理链接的终端发送参与者的可能的未

用于避免横向碰撞的方法和系统.pdf
本发明涉及一种用于避免本车横向碰撞(1)的方法,该方法具有以下步骤:‑监测本车(1)的横向区域,将所监测的区域分成至少两个子区域,所述子区域至少包括一预警区域(V1‑V3)和一触发区域(T),‑识别出在预警区域(V1‑V3)和触发区域(T)中的目标车辆(2),‑确定本车(1)和目标车辆(2)的运动参数,‑控制本车(1)以使之与目标车辆(2)的距离增大,其特征在于,根据目标车辆(2)在预警区域(V1‑V3)中以及在触发区域(T)中的停留时间(t
用于为主车辆提供干预转向动作以避免碰撞的方法和系统.pdf
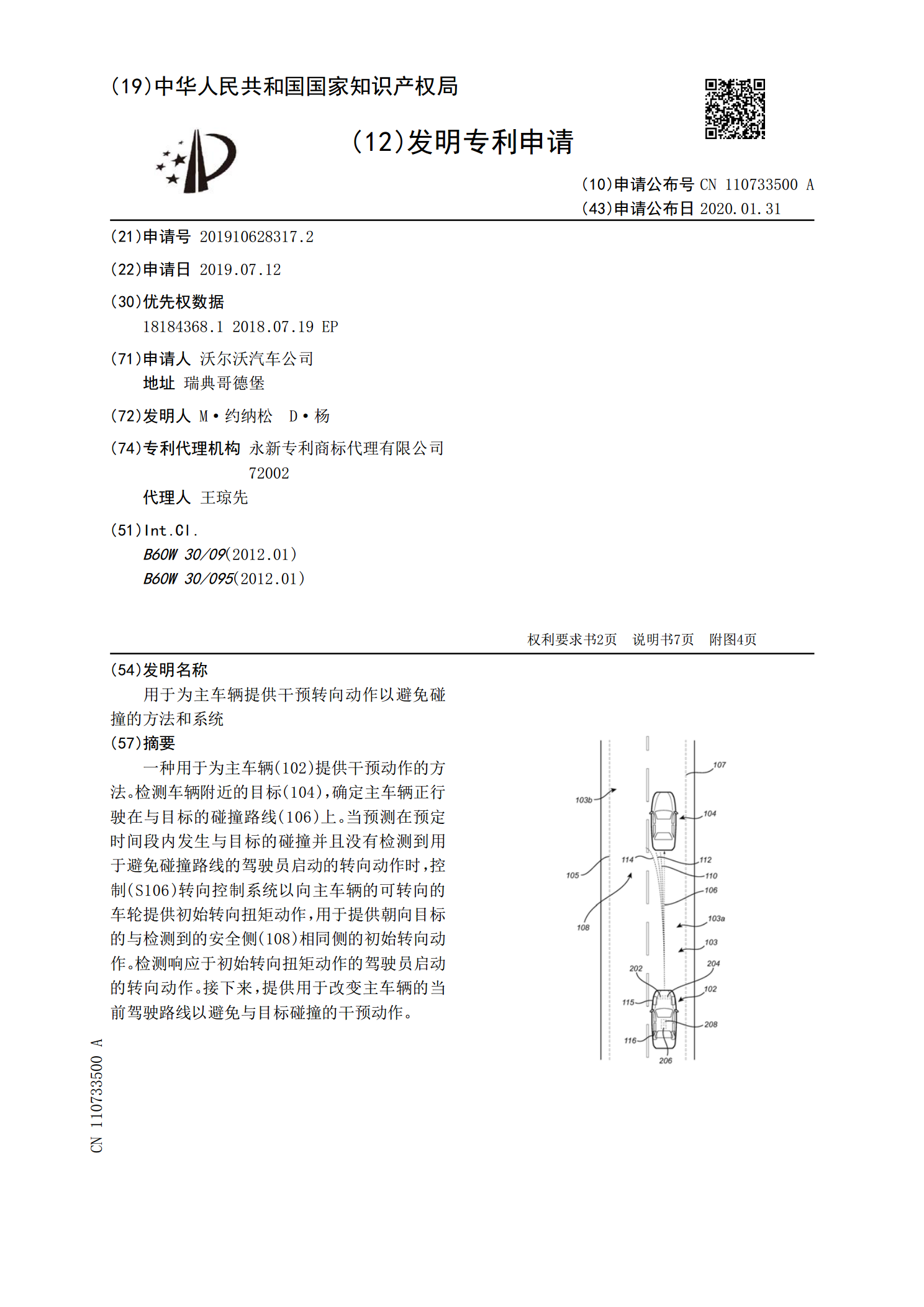
一种用于为主车辆(102)提供干预动作的方法。检测车辆附近的目标(104),确定主车辆正行驶在与目标的碰撞路线(106)上。当预测在预定时间段内发生与目标的碰撞并且没有检测到用于避免碰撞路线的驾驶员启动的转向动作时,控制(S106)转向控制系统以向主车辆的可转向的车轮提供初始转向扭矩动作,用于提供朝向目标的与检测到的安全侧(108)相同侧的初始转向动作。检测响应于初始转向扭矩动作的驾驶员启动的转向动作。接下来,提供用于改变主车辆的当前驾驶路线以避免与目标碰撞的干预动作。

避免车辆间碰撞的系统.pdf
本发明提供一种车辆防撞方法和系统,在一个实施方式中,本车的控制器接收来自周边车辆的数据,其指示周边车辆的位置和行进方向。控制器使用地图数据和从周边车辆接收的数据确定周边车辆行进的道路路径。控制器使用地图数据和指示本车的位置和行进方向的数据确定本车行进的道路路径。控制器还确定本车行进的道路路径与周边车辆行进的道路路径是否相交。响应于确定本车行进的道路路径与周边车辆行进的道路路径相交,控制器进一步提供警报。