
一种管道智能巡检系统.pdf

盼易****君a


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种管道智能巡检系统.pdf
一种管道智能巡检系统,其包括管道巡检机器人、检测单元、图像显示单元、通信单元、远程控制单元等。本发明系统根据检测单元传递的管道内径信息,控制所述滚轮抵接管道的内壁,然后驱动所述行走电机运转,带动所述管道巡检机器人在管道内行走,同时驱动所述清理头旋转刮去管道内壁表面的污物。本发明能够根据管道尺寸相应的控制支撑臂端部的滚轮,使其保持与管道内壁的紧密抵接,使其能够通过滚轮的抵接作用维持管道巡检机器人在管道中的位置,实现对管道巡检机器人上下运行的驱动和控制。由此,本发明使得管道巡检机器人即保持了一定管道通过性也能
一种智能巡检系统及其巡检方法.pdf
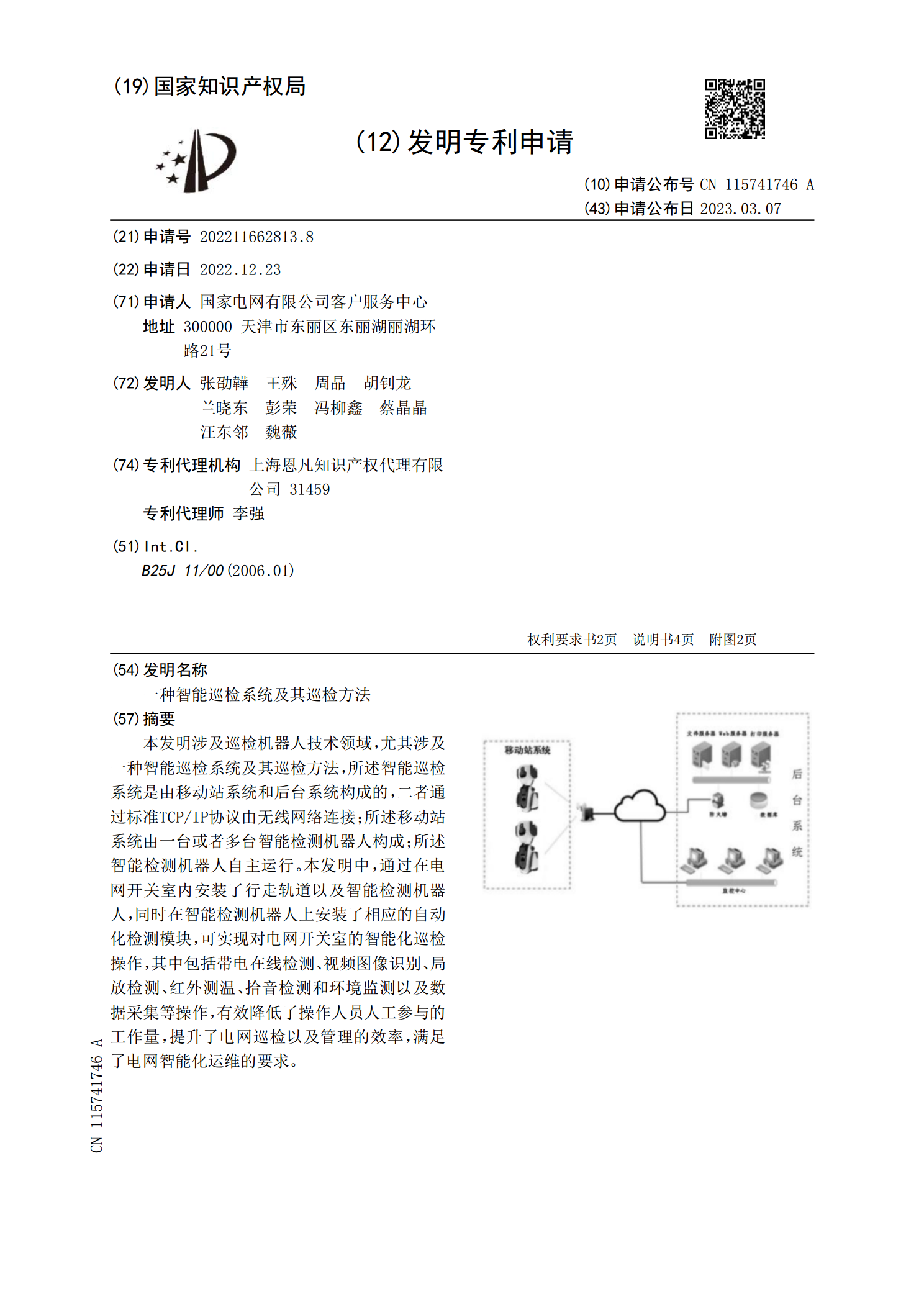
本发明涉及巡检机器人技术领域,尤其涉及一种智能巡检系统及其巡检方法,所述智能巡检系统是由移动站系统和后台系统构成的,二者通过标准TCP/IP协议由无线网络连接;所述移动站系统由一台或者多台智能检测机器人构成;所述智能检测机器人自主运行。本发明中,通过在电网开关室内安装了行走轨道以及智能检测机器人,同时在智能检测机器人上安装了相应的自动化检测模块,可实现对电网开关室的智能化巡检操作,其中包括带电在线检测、视频图像识别、局放检测、红外测温、拾音检测和环境监测以及数据采集等操作,有效降低了操作人员人工参与的工作
一种智能电力巡检设备及电力巡检系统.pdf
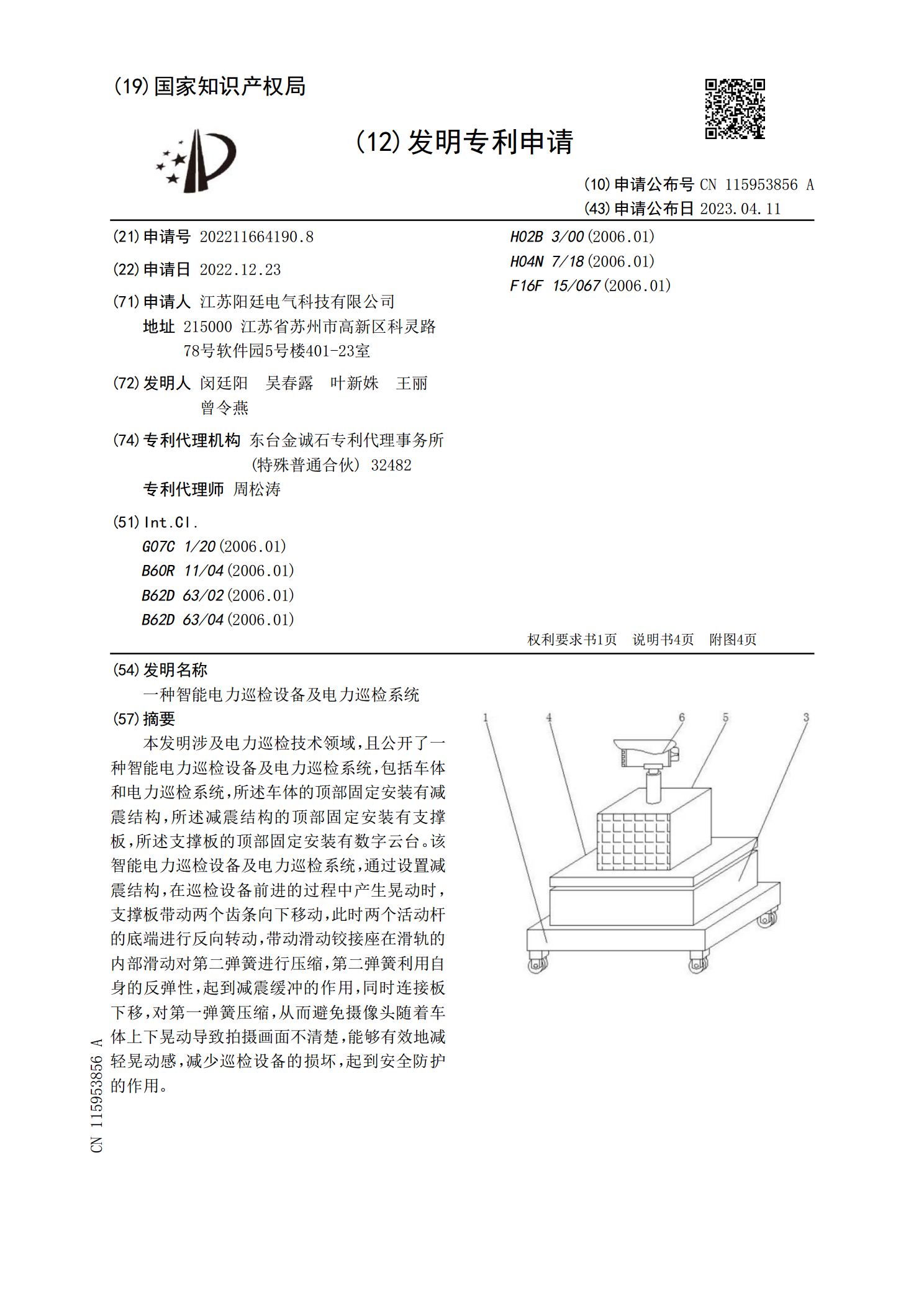
本发明涉及电力巡检技术领域,且公开了一种智能电力巡检设备及电力巡检系统,包括车体和电力巡检系统,所述车体的顶部固定安装有减震结构,所述减震结构的顶部固定安装有支撑板,所述支撑板的顶部固定安装有数字云台。该智能电力巡检设备及电力巡检系统,通过设置减震结构,在巡检设备前进的过程中产生晃动时,支撑板带动两个齿条向下移动,此时两个活动杆的底端进行反向转动,带动滑动铰接座在滑轨的内部滑动对第二弹簧进行压缩,第二弹簧利用自身的反弹性,起到减震缓冲的作用,同时连接板下移,对第一弹簧压缩,从而避免摄像头随着车体上下晃动导

一种智能巡检方法及系统.pdf
本发明涉及一种智能巡检方法及系统,通过对巡检区域内区域信息及巡检目标,通信方式及设备的识别,确定巡检方案,构建组网策略,确定数据传输方式;通过对区域内的移动巡检仪进行实时监控,根据移动巡检仪的状态进行巡检方案的自适应调整,由此实现能够针对各个项目的特点个性化的制定巡检方案,数据传输策略,并结合实际的项目进程等进行自适应调整,由此不仅提高了项目的个性化需求,也保证了数据传输的可靠性,大大降低了人力成本,提高了巡检的智能化。

油气管道智能巡检系统的设计与实现综述报告.docx
油气管道智能巡检系统的设计与实现综述报告随着油气工业的发展,越来越多的油气管道被建设并运营,如何保障它们的安全稳定运行成为一项重要任务。传统的管道巡检需要耗费大量的时间和人力,而且还存在一定的安全风险。因此,油气管道智能巡检系统应运而生,它可以通过各种现代科技手段来实现自动化、快速高效的巡检,保障管道的安全运营。本篇报告将对油气管道智能巡检系统的设计与实现进行综述。一、智能巡检系统的设计原理智能巡检系统的设计原理包括数据采集、数据传输、数据处理和数据分析等四个环节。数据采集:智能巡检系统主要通过传感器来采