
负弯度翼型机身制动诱导差速式多旋翼直升机.pdf

一条****彩妍


1/10
2/10

3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共31页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
负弯度翼型机身制动诱导差速式多旋翼直升机.pdf
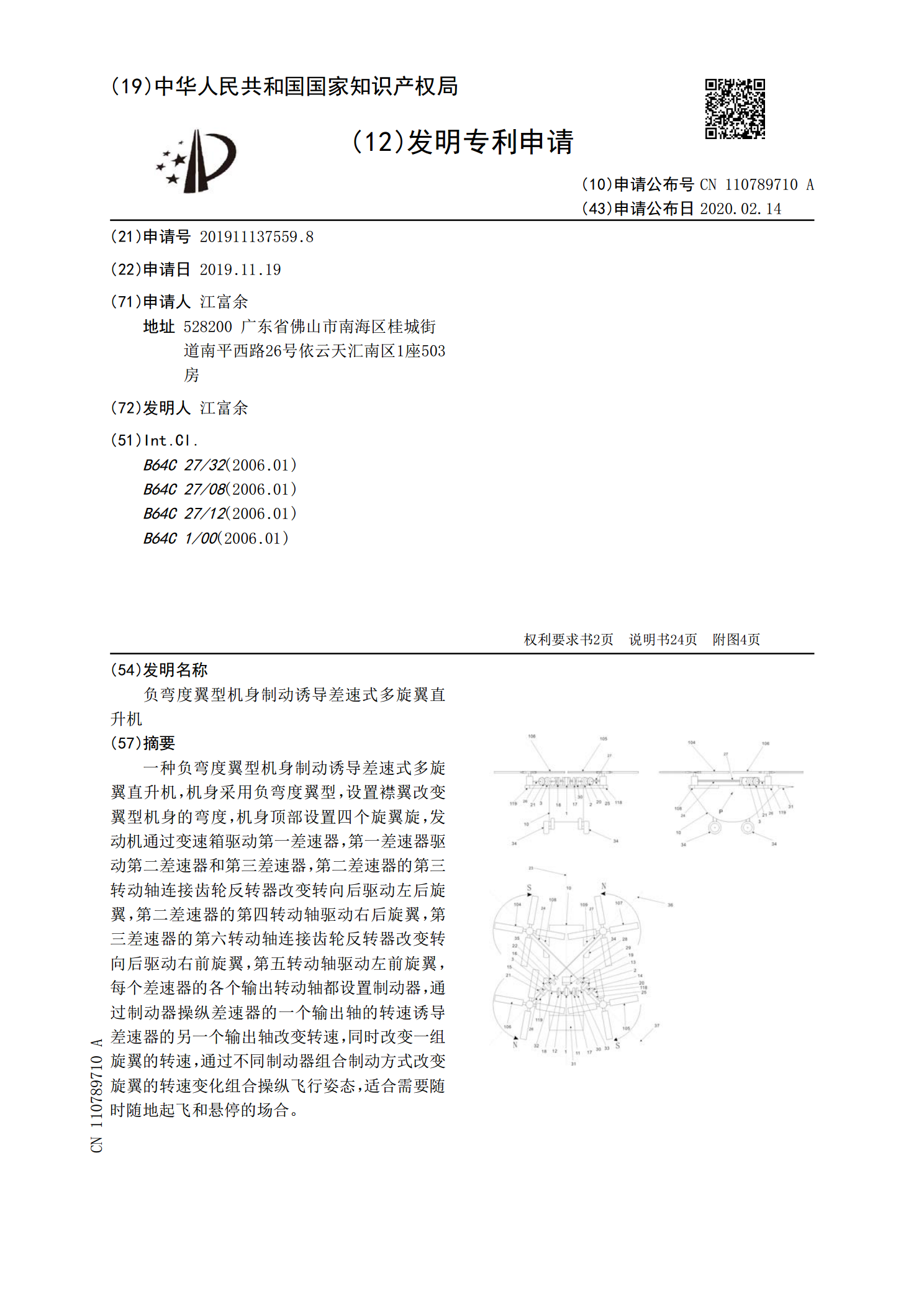
一种负弯度翼型机身制动诱导差速式多旋翼直升机,机身采用负弯度翼型,设置襟翼改变翼型机身的弯度,机身顶部设置四个旋翼旋,发动机通过变速箱驱动第一差速器,第一差速器驱动第二差速器和第三差速器,第二差速器的第三转动轴连接齿轮反转器改变转向后驱动左后旋翼,第二差速器的第四转动轴驱动右后旋翼,第三差速器的第六转动轴连接齿轮反转器改变转向后驱动右前旋翼,第五转动轴驱动左前旋翼,每个差速器的各个输出转动轴都设置制动器,通过制动器操纵差速器的一个输出轴的转速诱导差速器的另一个输出轴改变转速,同时改变一组旋翼的转速,通过不
多旋翼直升机.pdf
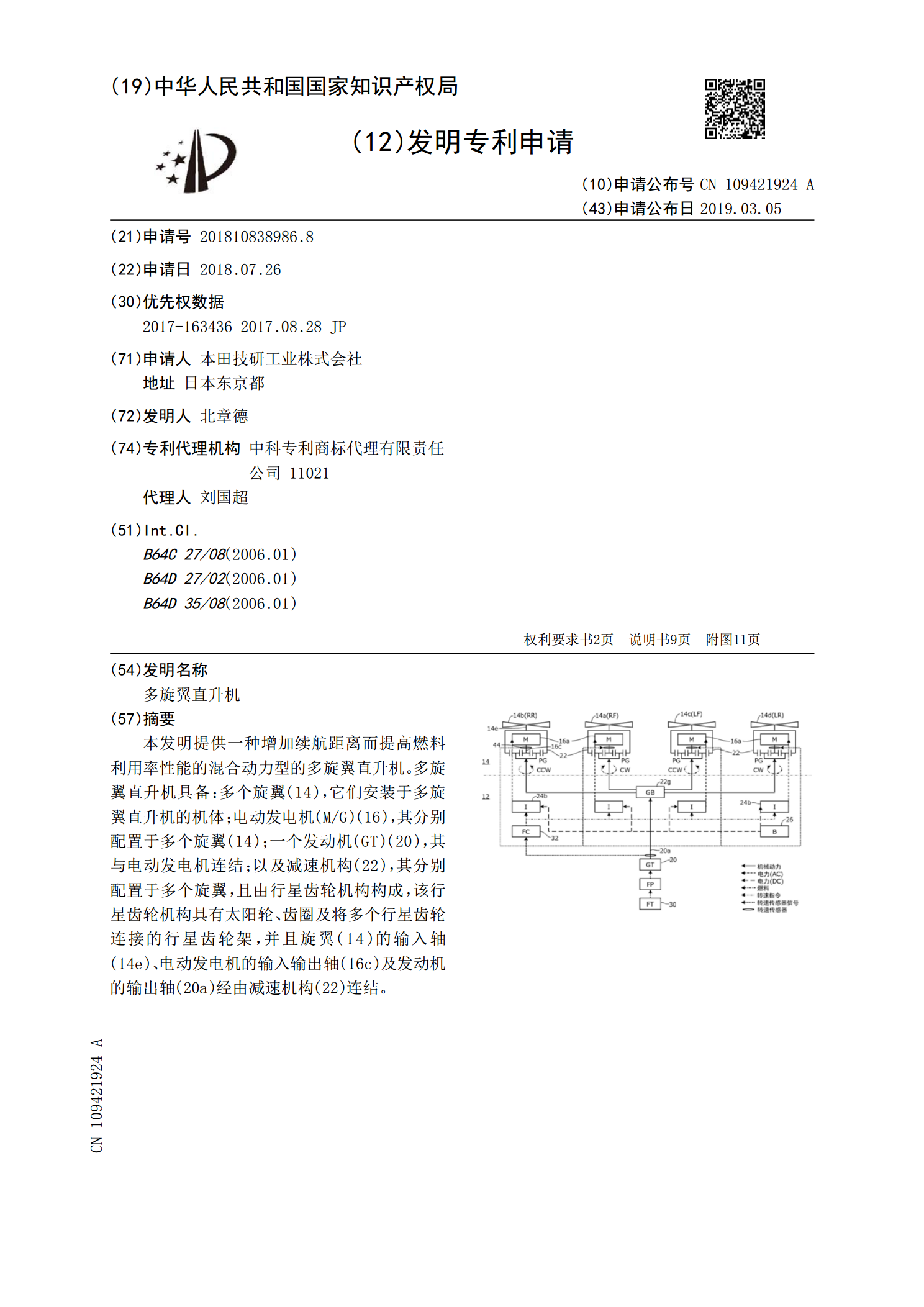
本发明提供一种增加续航距离而提高燃料利用率性能的混合动力型的多旋翼直升机。多旋翼直升机具备:多个旋翼(14),它们安装于多旋翼直升机的机体;电动发电机(M/G)(16),其分别配置于多个旋翼(14);一个发动机(GT)(20),其与电动发电机连结;以及减速机构(22),其分别配置于多个旋翼,且由行星齿轮机构构成,该行星齿轮机构具有太阳轮、齿圈及将多个行星齿轮连接的行星齿轮架,并且旋翼(14)的输入轴(14e)、电动发电机的输入输出轴(16c)及发动机的输出轴(20a)经由减速机构(22)连结。
用于直升机旋翼的恒速接头.pdf
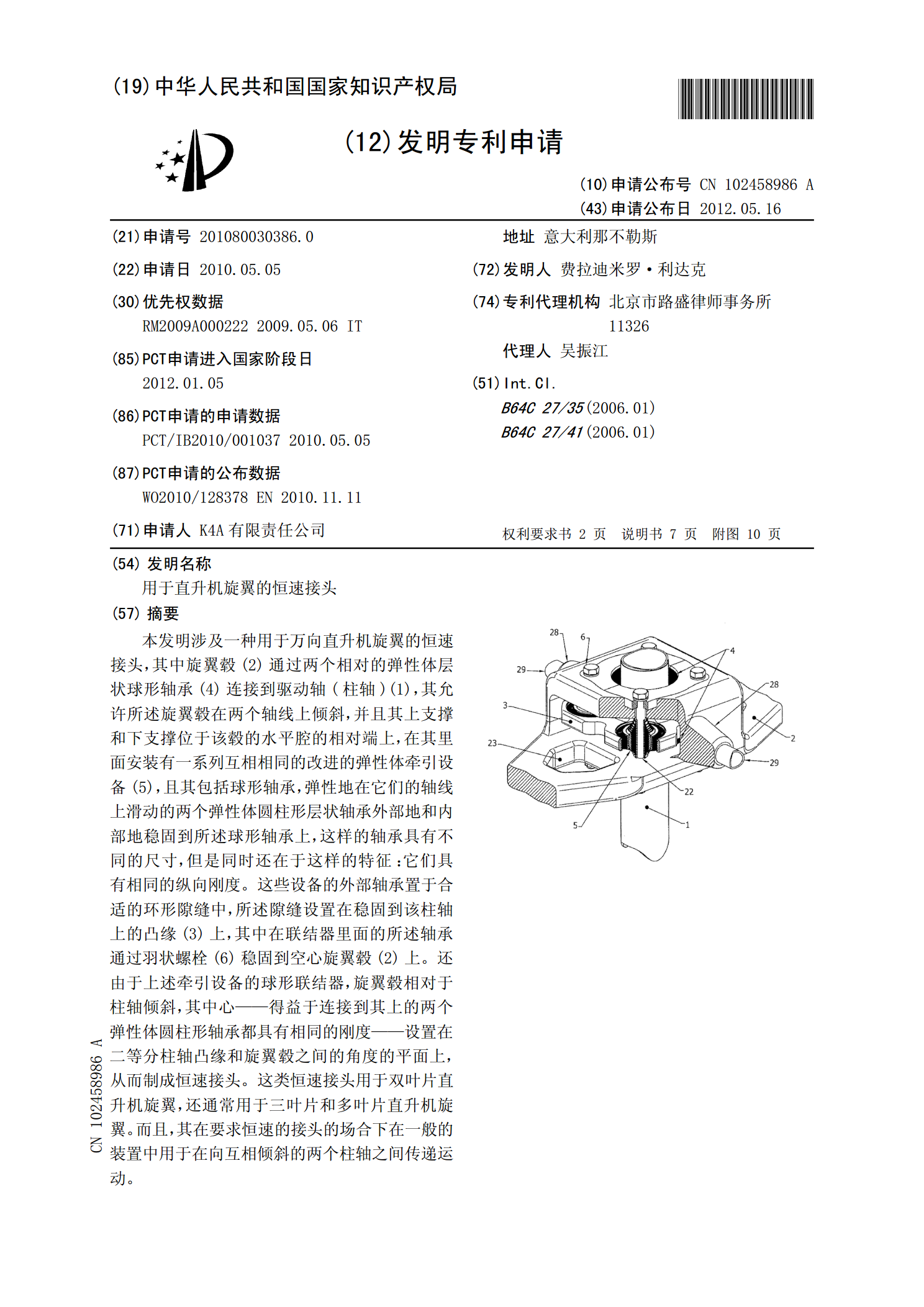
本发明涉及一种用于万向直升机旋翼的恒速接头,其中旋翼毂(2)通过两个相对的弹性体层状球形轴承(4)连接到驱动轴(柱轴)(1),其允许所述旋翼毂在两个轴线上倾斜,并且其上支撑和下支撑位于该毂的水平腔的相对端上,在其里面安装有一系列互相相同的改进的弹性体牵引设备(5),且其包括球形轴承,弹性地在它们的轴线上滑动的两个弹性体圆柱形层状轴承外部地和内部地稳固到所述球形轴承上,这样的轴承具有不同的尺寸,但是同时还在于这样的特征:它们具有相同的纵向刚度。这些设备的外部轴承置于合适的环形隙缝中,所述隙缝设置在稳固到该柱
旋翼轴可控倾转式共轴旋翼直升机.pdf
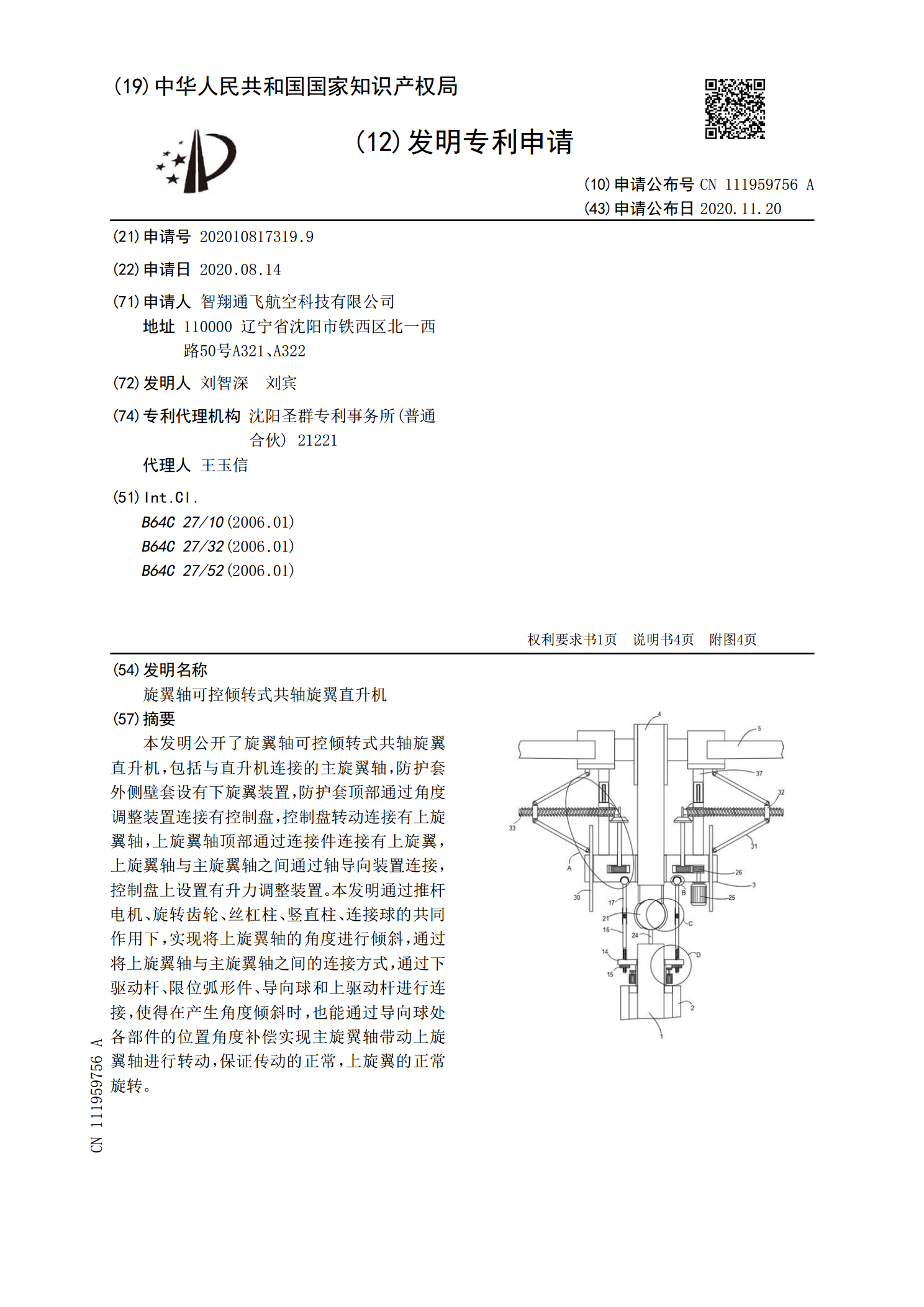
本发明公开了旋翼轴可控倾转式共轴旋翼直升机,包括与直升机连接的主旋翼轴,防护套外侧壁套设有下旋翼装置,防护套顶部通过角度调整装置连接有控制盘,控制盘转动连接有上旋翼轴,上旋翼轴顶部通过连接件连接有上旋翼,上旋翼轴与主旋翼轴之间通过轴导向装置连接,控制盘上设置有升力调整装置。本发明通过推杆电机、旋转齿轮、丝杠柱、竖直柱、连接球的共同作用下,实现将上旋翼轴的角度进行倾斜,通过将上旋翼轴与主旋翼轴之间的连接方式,通过下驱动杆、限位弧形件、导向球和上驱动杆进行连接,使得在产生角度倾斜时,也能通过导向球处各部件的位

喷气式旋翼直升机.pdf
本发明涉及一种喷气式旋翼直升机,包括旋翼、机身、起落架以及滚轮,所述机身下端安装有起落架,起落架下端安装有多个用于起落滑行的滚轮;机身上端通过一旋翼轴铰装有一水平设置的旋翼,该旋翼由多支径向均布的旋翼翼片组成,所述旋翼翼片均安装/制有喷气翼尖,其具体结构为在旋翼翼片的尖端的一侧均安装有一喷头,该多个喷头均通过管路连接一安装在机身内的发动机而且,所述机身尾部安装有一垂直的推进螺旋桨,该推进螺旋桨由单独的发动机驱动。本发明结构简单、运行稳定、故障率低、控制效果好,能够实现无滑跑倾斜起飞和准垂直降落,并且可以大