
一种用于烧结机车维修的回转装置及其位置补偿方法.pdf

是浩****32


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于烧结机车维修的回转装置及其位置补偿方法.pdf
本发明提供了一种用于烧结机车维修的回转装置及其位置补偿方法,该用于烧结机车维修的回转装置及其位置补偿方法通过在回转装置上设置测距模组来实时获取该回转装置上承载的烧结机车与回转台两者之间的位置偏差数据,再根据该位置偏差数据自动控制该回转台进行适应性的旋转动作,从而使得该烧结机车的中心线与该回转台的中心线相互之间保持平行,以便于在维修过程中机器人准确地对烧结机车的车轮进行定位抓取操作。

环轧件加工中的位置补偿装置及其位置补偿方法.pdf
本发明提供一种环轧件加工中的位置补偿装置,其使用激光在线检测环轧件的尺寸,该位置补偿装置包括:激光扫描单元、激光散斑成像单元和控制单元。激光扫描单元对环轧件在轧制过程中的数据进行采集,激光散斑成像单元与激光扫描单元同步,对环轧件的表面形成散斑图像,控制单元控制激光扫描单元以及激光散斑成像单元,基于由激光扫描单元采集得到的数据和由激光散斑成像单元形成的散斑图像,来计算环轧件的位置补偿量。本发明还提供一种环轧件加工中的位置补偿方法,其可以对正在碾扩的环轧件进行尺寸测量并对环轧件半径变化的差值进行补偿,进而实现
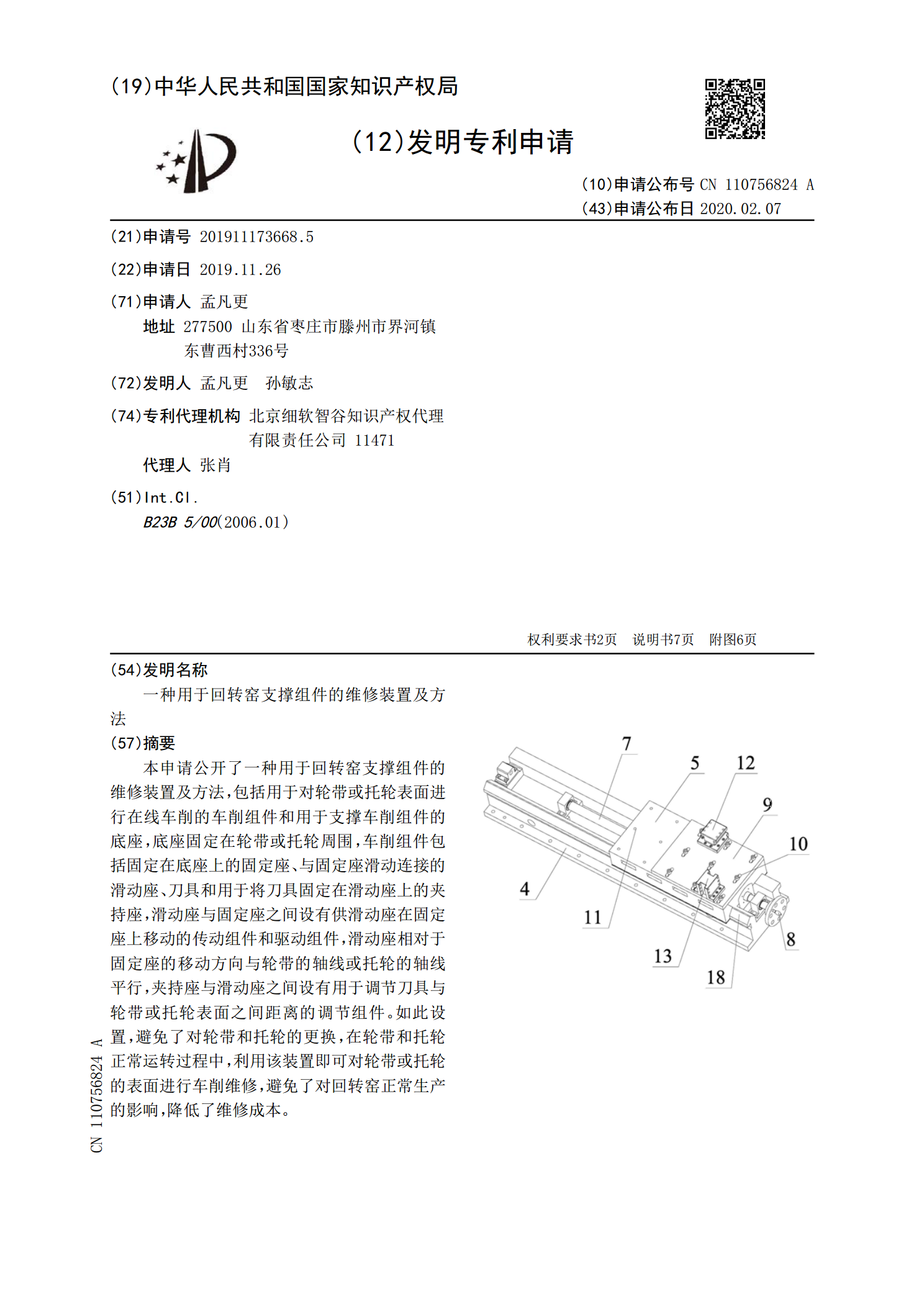
一种用于回转窑支撑组件的维修装置及方法.pdf
本申请公开了一种用于回转窑支撑组件的维修装置及方法,包括用于对轮带或托轮表面进行在线车削的车削组件和用于支撑车削组件的底座,底座固定在轮带或托轮周围,车削组件包括固定在底座上的固定座、与固定座滑动连接的滑动座、刀具和用于将刀具固定在滑动座上的夹持座,滑动座与固定座之间设有供滑动座在固定座上移动的传动组件和驱动组件,滑动座相对于固定座的移动方向与轮带的轴线或托轮的轴线平行,夹持座与滑动座之间设有用于调节刀具与轮带或托轮表面之间距离的调节组件。如此设置,避免了对轮带和托轮的更换,在轮带和托轮正常运转过程中,利
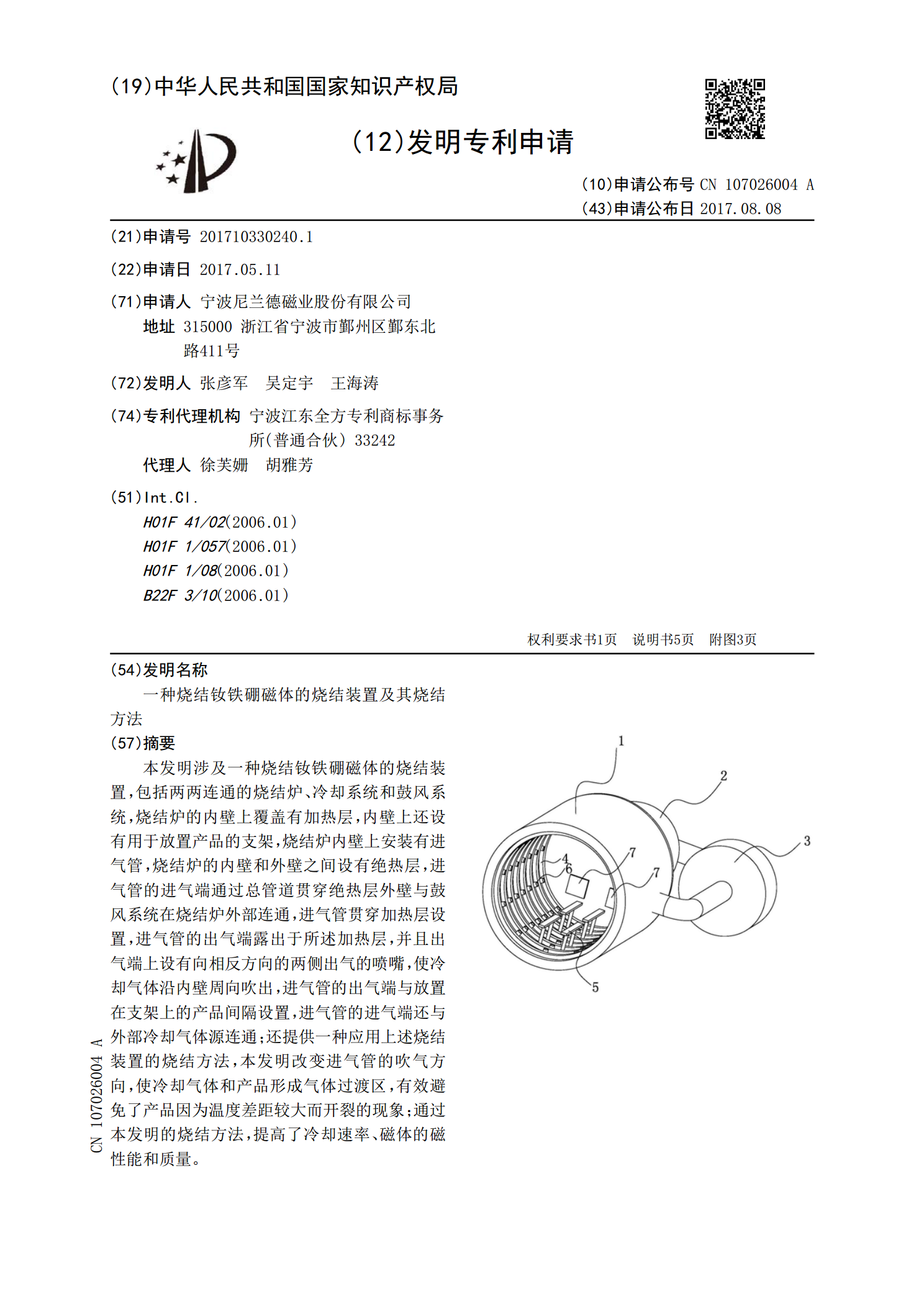
一种烧结钕铁硼磁体的烧结装置及其烧结方法.pdf
本发明涉及一种烧结钕铁硼磁体的烧结装置,包括两两连通的烧结炉、冷却系统和鼓风系统,烧结炉的内壁上覆盖有加热层,内壁上还设有用于放置产品的支架,烧结炉内壁上安装有进气管,烧结炉的内壁和外壁之间设有绝热层,进气管的进气端通过总管道贯穿绝热层外壁与鼓风系统在烧结炉外部连通,进气管贯穿加热层设置,进气管的出气端露出于所述加热层,并且出气端上设有向相反方向的两侧出气的喷嘴,使冷却气体沿内壁周向吹出,进气管的出气端与放置在支架上的产品间隔设置,进气管的进气端还与外部冷却气体源连通;还提供一种应用上述烧结装置的烧结方法
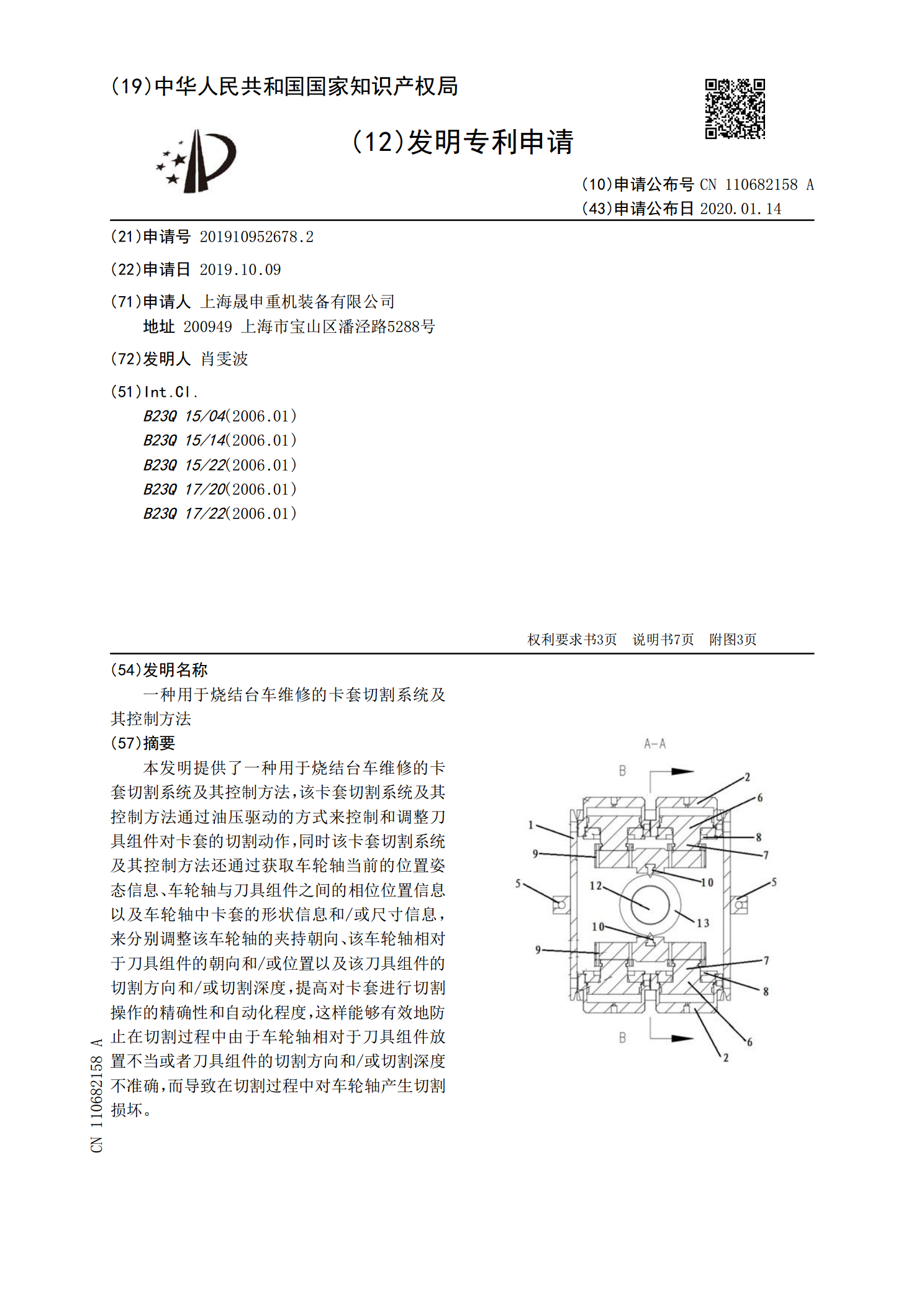
一种用于烧结台车维修的卡套切割系统及其控制方法.pdf
本发明提供了一种用于烧结台车维修的卡套切割系统及其控制方法,该卡套切割系统及其控制方法通过油压驱动的方式来控制和调整刀具组件对卡套的切割动作,同时该卡套切割系统及其控制方法还通过获取车轮轴当前的位置姿态信息、车轮轴与刀具组件之间的相位位置信息以及车轮轴中卡套的形状信息和/或尺寸信息,来分别调整该车轮轴的夹持朝向、该车轮轴相对于刀具组件的朝向和/或位置以及该刀具组件的切割方向和/或切割深度,提高对卡套进行切割操作的精确性和自动化程度,这样能够有效地防止在切割过程中由于车轮轴相对于刀具组件放置不当或者刀具组件