
一种餐厅送餐机器人.pdf

书生****写意


1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种餐厅送餐机器人.pdf
本发明公开了一种餐厅送餐机器人。包括导轨和运送机器人,导轨分为直线导轨、转弯圆盘和卸料梳齿,直线导轨铺设在运输地面上,直线导轨间设有转弯圆盘,直线导轨是由条形底板和布置在条形底板上的两条平行布置的条状导轨构成,转弯圆盘是由圆形底板和布置在圆形底板上的两条同心圆布置的圆弧导轨构成,通过转弯圆盘和运送机器人的配合进行路口拐弯实现不同直线导轨间的运输;直线导轨上布置有卸料架,卸料架上安装卸料梳齿。本发明结构简单有效,机器人不需要考虑转向问题,有效减少运送的时间,降低了由于轮子的差速造成的侧翻率,实用性高,能够适
一种餐厅送餐服务机器人.pdf
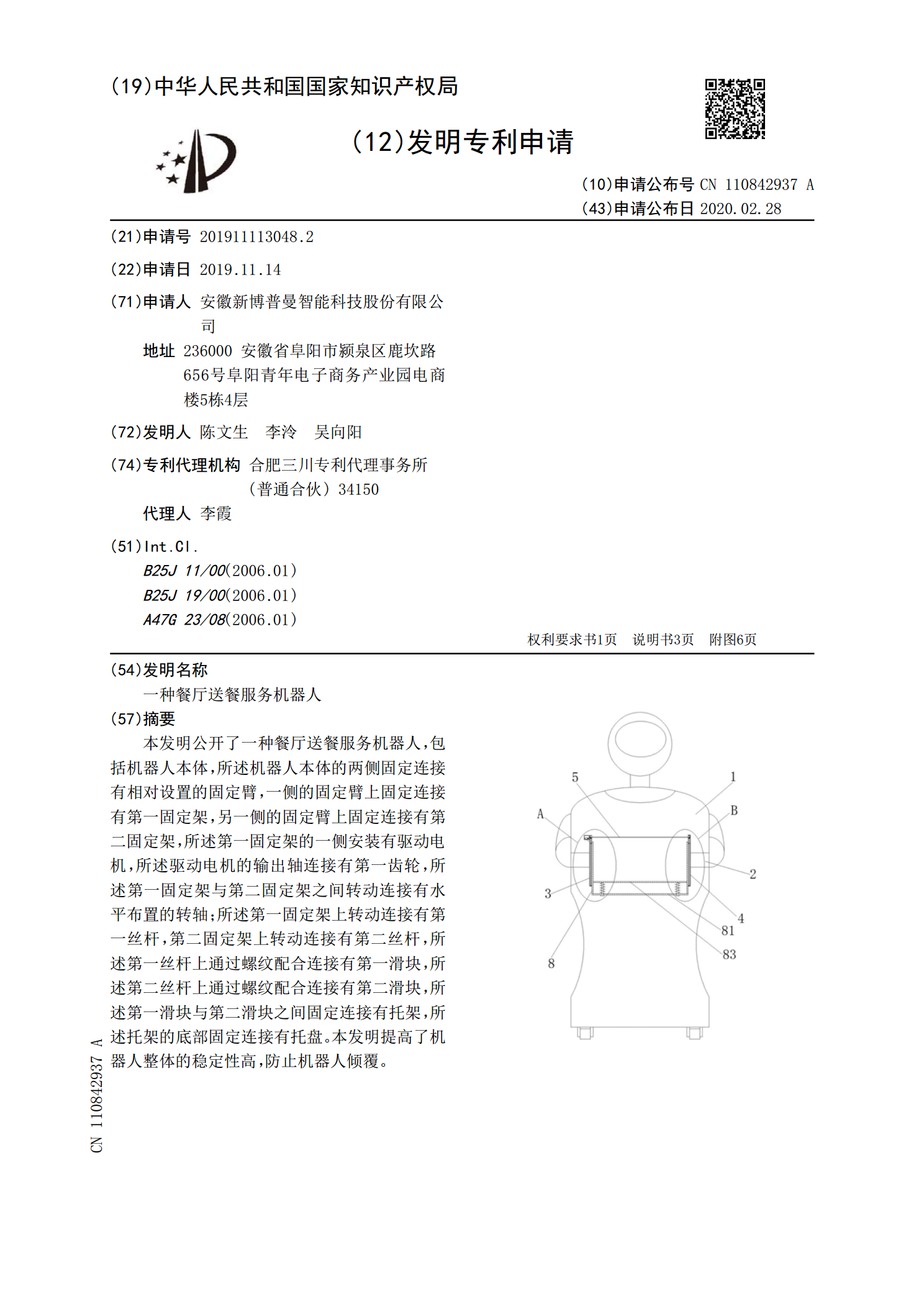
本发明公开了一种餐厅送餐服务机器人,包括机器人本体,所述机器人本体的两侧固定连接有相对设置的固定臂,一侧的固定臂上固定连接有第一固定架,另一侧的固定臂上固定连接有第二固定架,所述第一固定架的一侧安装有驱动电机,所述驱动电机的输出轴连接有第一齿轮,所述第一固定架与第二固定架之间转动连接有水平布置的转轴;所述第一固定架上转动连接有第一丝杆,第二固定架上转动连接有第二丝杆,所述第一丝杆上通过螺纹配合连接有第一滑块,所述第二丝杆上通过螺纹配合连接有第二滑块,所述第一滑块与第二滑块之间固定连接有托架,所述托架的底部

一种无人餐厅智能点餐送餐机器人.pdf
本发明公开了一种无人餐厅智能点餐送餐机器人,客户通过自助点餐模块自助点餐,智能机器人对用户的点餐菜单进行语音播放确认,并打印点餐菜单,生成付款二维码,客户根据机器人展示的付款二维码通过微信或支付宝扫码完成付款,在用户付款后将机器人将打印出的点餐菜单送到后厨,并在接收到后厨的呼叫信息后从后厨将菜品送往餐桌,完成点餐或送餐工作,本发明通过智能机器人全部完成餐厅的点餐和送餐工作,实现了餐厅的无人管理化,不仅极大的节约了餐厅的人力成本,而且能够提供比服务更为准确高效的服务,减少了服务员与客户发生冲突的风险。
一种餐厅自动烹饪送餐机器人.pdf
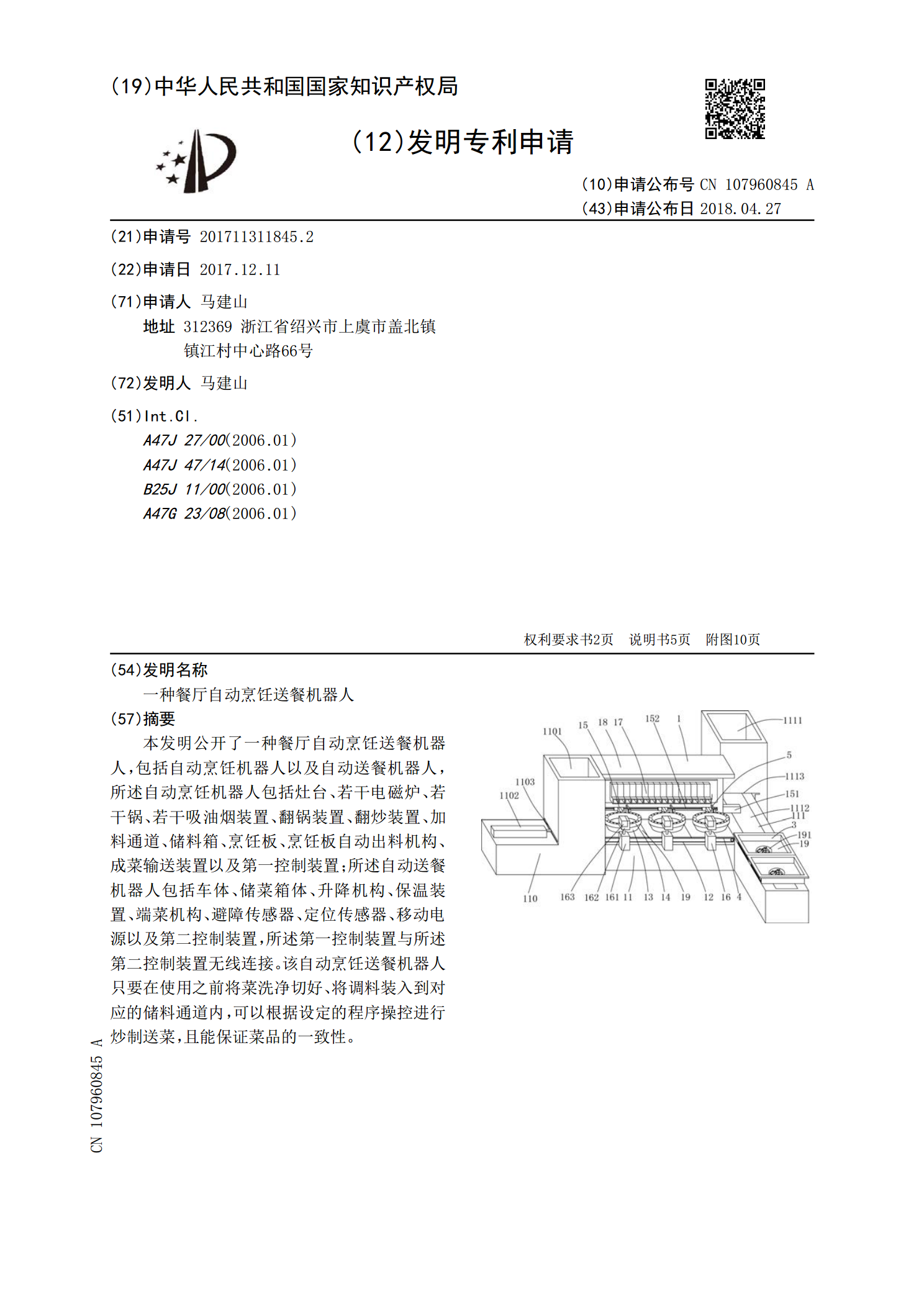
本发明公开了一种餐厅自动烹饪送餐机器人,包括自动烹饪机器人以及自动送餐机器人,所述自动烹饪机器人包括灶台、若干电磁炉、若干锅、若干吸油烟装置、翻锅装置、翻炒装置、加料通道、储料箱、烹饪板、烹饪板自动出料机构、成菜输送装置以及第一控制装置;所述自动送餐机器人包括车体、储菜箱体、升降机构、保温装置、端菜机构、避障传感器、定位传感器、移动电源以及第二控制装置,所述第一控制装置与所述第二控制装置无线连接。该自动烹饪送餐机器人只要在使用之前将菜洗净切好、将调料装入到对应的储料通道内,可以根据设定的程序操控进行炒制送
餐厅智能送餐机器人.pdf
本发明公开了一种餐厅智能送餐机器人,采用三轮车智能小车底盘为载体,三轮小车由电机驱动,在单片机控制下沿着送餐预定线路轨道行驶,机器人初始化后将确认是否检测到送餐预定线路轨道,如果检测到,机器人将根据光电传感器的信息来确认机器人当前的位置信息,如果机器人没有检测到,则会持续进行轨道的行为,以便确认机器人的位置;机器人位置确认好后,会利用传感器来实现障碍物的检测,如果检测到障碍物,机器人则启动声光系统来与人类交互,以提醒人类主动避让,若没有检测到障碍物,则机器人会根据当前位置信息和目标位置信息来实现下一步运动