
管道裂纹检测机器人.pdf

努力****梓颖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

管道裂纹检测机器人.pdf
本发明公开了一种管道裂纹检测机器人,包括:涡流传感器安装架、两个主动轮装置、平移、旋转运动辅助装置均设在主机架上;两个主动轮装置在机架上与被测管道轴线呈空间45度角对称布置,它们前端均设有贴紧被测管道外壁的主动轮轴;平移运动辅助装置处于两个主动轮装置之间与管道轴线垂直的中间位置,它的前端设有能夹紧管道并沿管道轴向移动的两个单向从动轮;旋转运动辅助装置处在平行于平移运动辅助装置的一侧,它的前端设有能贴紧管道并沿管道周向移动的从动履带。该检测机器人能实现沿管道平移和旋转,成本低,重量轻,调节辅助运动夹紧装置,

一种管道裂纹检测机器人及其控制方法.pdf
本发明公开了一种管道裂纹检测机器人及其控制方法,机器人包括透明的球形外壳;外壳内设置有两侧带轮子的移动平台;移动平台上设置有开关,开关与电源电性连接;电源分别与电机、控制器、微处理器电性连接;控制器与电机电性连接;控制器与微处理器双向连接,微处理器与摄像头双向连接,且微处理器与物联网云平台OneNET通信连接,物联网云平台OneNET与移动终端通信连接;控制器与加速度传感器双向连接;电机的输出轴与轮子的中心轴固接。机器人结构简单、体积较小、易于操作。
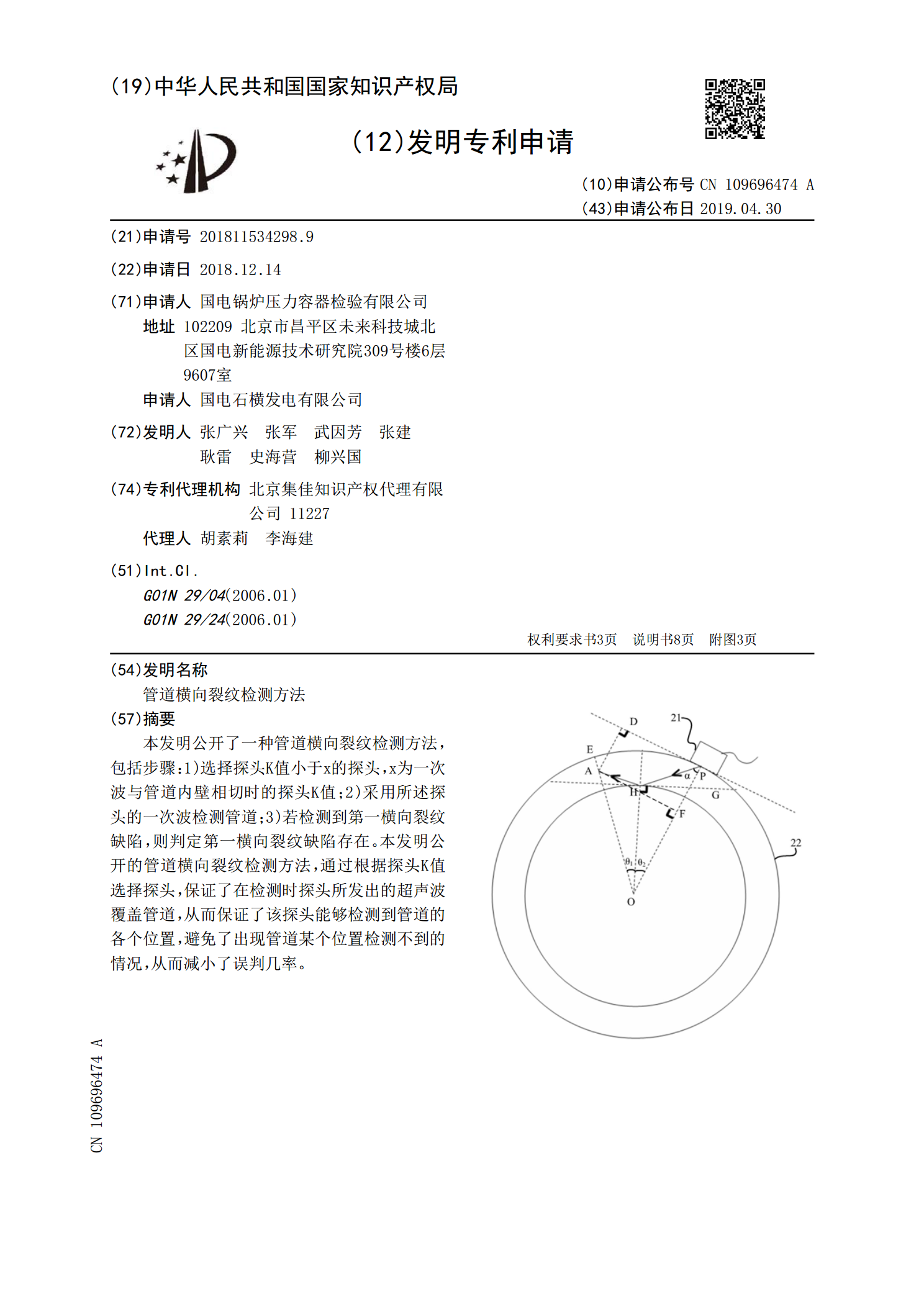
管道横向裂纹检测方法.pdf
本发明公开了一种管道横向裂纹检测方法,包括步骤:1)选择探头K值小于x的探头,x为一次波与管道内壁相切时的探头K值;2)采用所述探头的一次波检测管道;3)若检测到第一横向裂纹缺陷,则判定第一横向裂纹缺陷存在。本发明公开的管道横向裂纹检测方法,通过根据探头K值选择探头,保证了在检测时探头所发出的超声波覆盖管道,从而保证了该探头能够检测到管道的各个位置,避免了出现管道某个位置检测不到的情况,从而减小了误判几率。
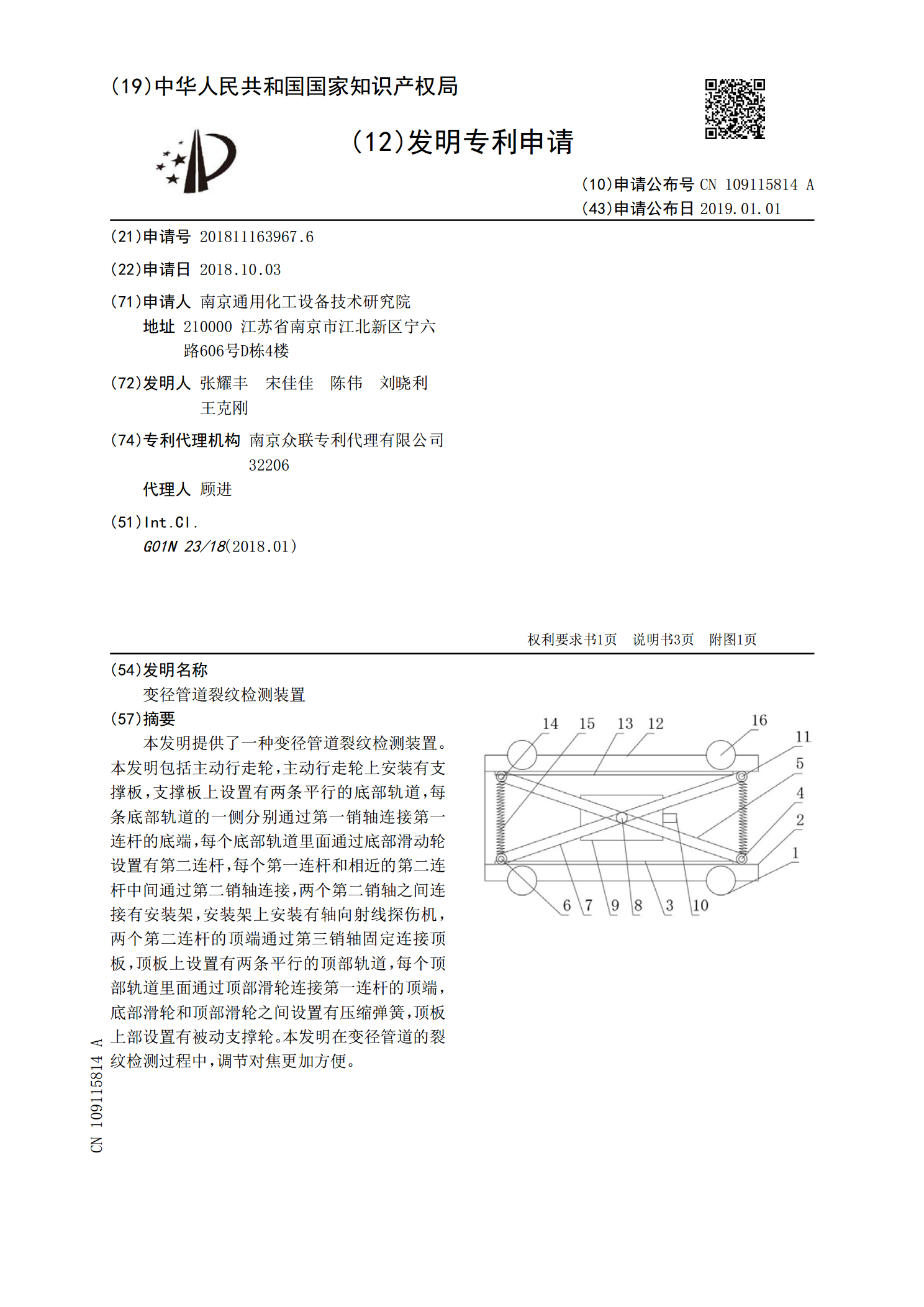
变径管道裂纹检测装置.pdf
本发明提供了一种变径管道裂纹检测装置。本发明包括主动行走轮,主动行走轮上安装有支撑板,支撑板上设置有两条平行的底部轨道,每条底部轨道的一侧分别通过第一销轴连接第一连杆的底端,每个底部轨道里面通过底部滑动轮设置有第二连杆,每个第一连杆和相近的第二连杆中间通过第二销轴连接,两个第二销轴之间连接有安装架,安装架上安装有轴向射线探伤机,两个第二连杆的顶端通过第三销轴固定连接顶板,顶板上设置有两条平行的顶部轨道,每个顶部轨道里面通过顶部滑轮连接第一连杆的顶端,底部滑轮和顶部滑轮之间设置有压缩弹簧,顶板上部设置有被动

管道检测机器人的驱动轮及管道检测机器人.pdf
本发明公开管道检测机器人的驱动轮,包括轮毂、骨架、叶片、接地凸起花纹,所述骨架为内部为空的扁状结构,所述骨架连接所述轮毂外圈,所述骨架的内表面与所述轮毂的内表面形成封闭腔体,所述骨架与所述轮毂同轴,所述叶片均匀连接所述骨架的外部,所述接地凸起花纹均匀间隔的连接所述骨架的外圈,并公开管道检测机器人的驱动轮的管道检测机器人。本发明的有益效果:本发明能够满足软泥、无水、少水、非满水、满水等多种工况的行驶,适应性强。