
一种车载全景影像标定方法及系统.pdf

子安****吖吖


1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车载全景影像标定方法及系统.pdf
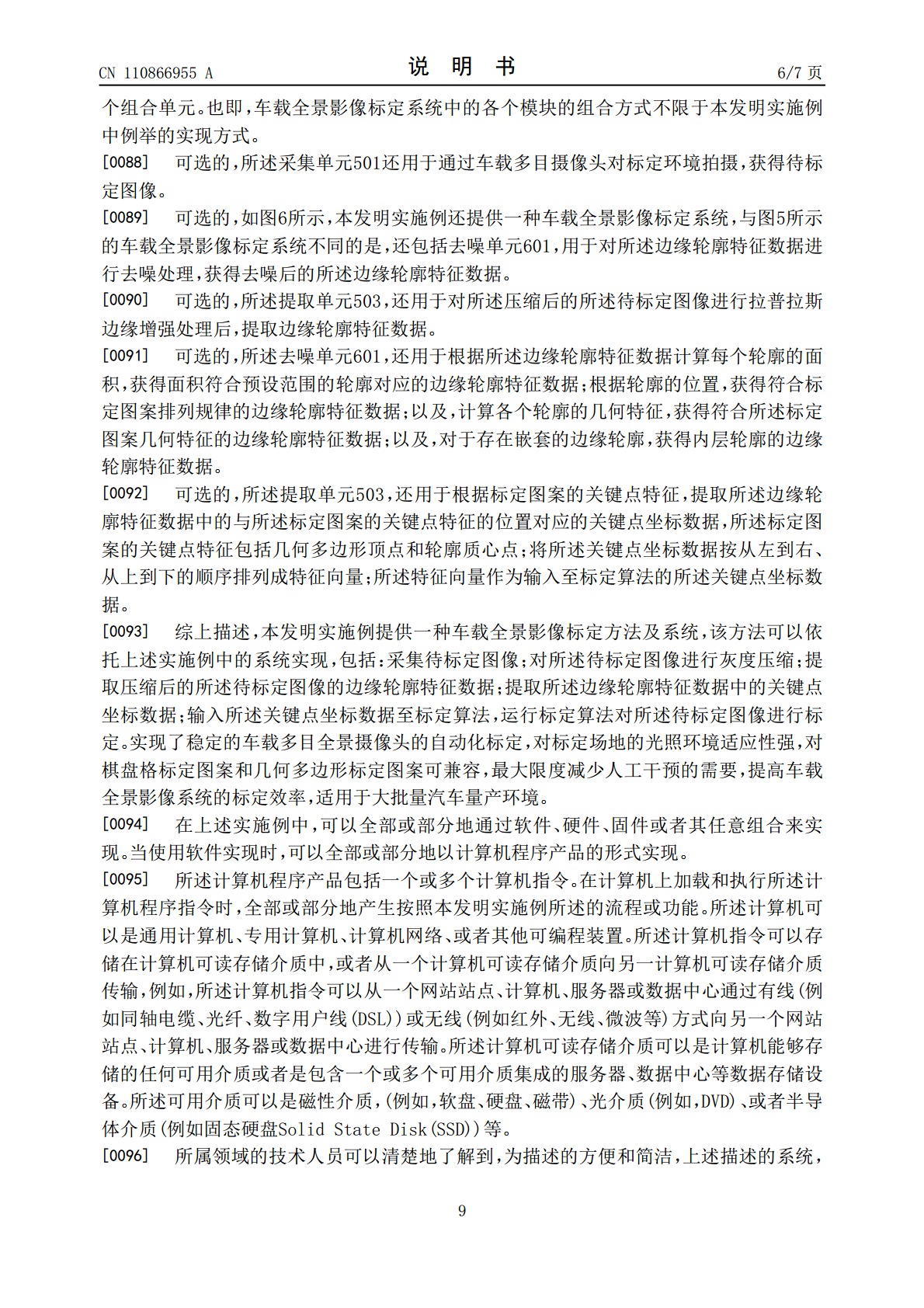
本发明实施例提供一种车载全景影像标定方法及系统,该方法包括:采集待标定图像;对所述待标定图像进行灰度压缩;提取压缩后的所述待标定图像的边缘轮廓特征数据;提取所述边缘轮廓特征数据中的关键点坐标数据;输入所述关键点坐标数据至标定算法,运行标定算法对所述待标定图像进行标定。实现了稳定的车载多目全景摄像头的自动化标定,对标定场地的光照环境适应性强,对棋盘格标定图案和几何多边形标定图案可兼容,最大限度减少人工干预的需要,提高车载全景影像系统的标定效率,适用于大批量汽车量产环境。
一种车载全景影像系统.pdf
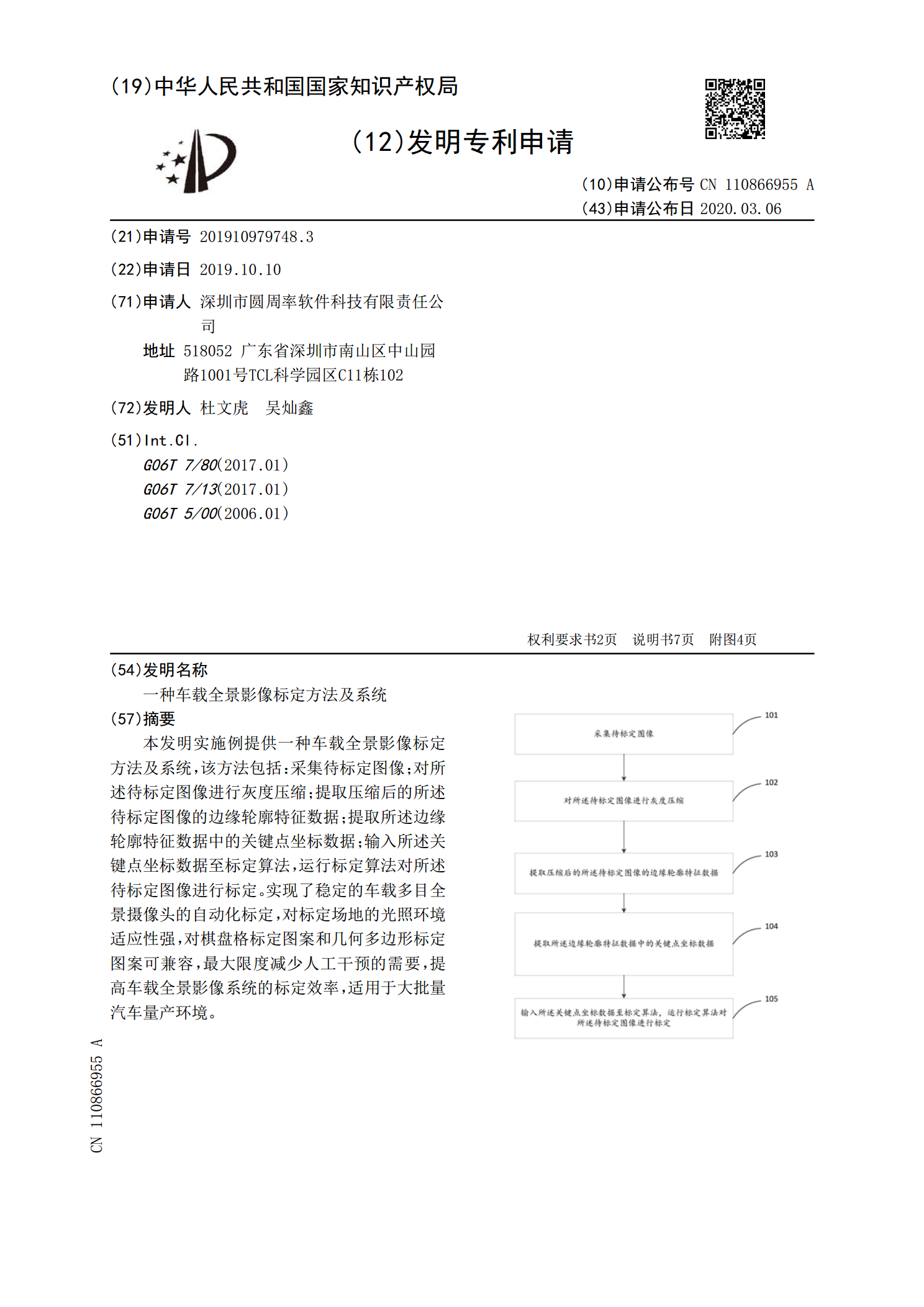
本发明公开了一种车载全景影像系统,所述系统包括:摄像模块,用于通过摄像装置拍摄车辆的A柱盲区内的影像;图像处理模块,用于对所述摄像模块拍摄的影像数据进行处理合成,生成A柱盲区影像数据;转向信号检测模块,用于检测车辆的转向信号;显示控制模块,用于根据转向信号检测结果控制所述车载全景影像系统的影像切换;显示模块,用于在显示器上实时显示处理合成后的A柱盲区影像。本发明提供的一种车载全景影像系统及其实现方法解决了汽车在低速转弯时,存在A柱盲区的问题,以及系统快速启动的问题,提高了全景影像系统的性能和驾驶的安全性。
一种全景泊车影像拼接标定方法及其标定物.pdf
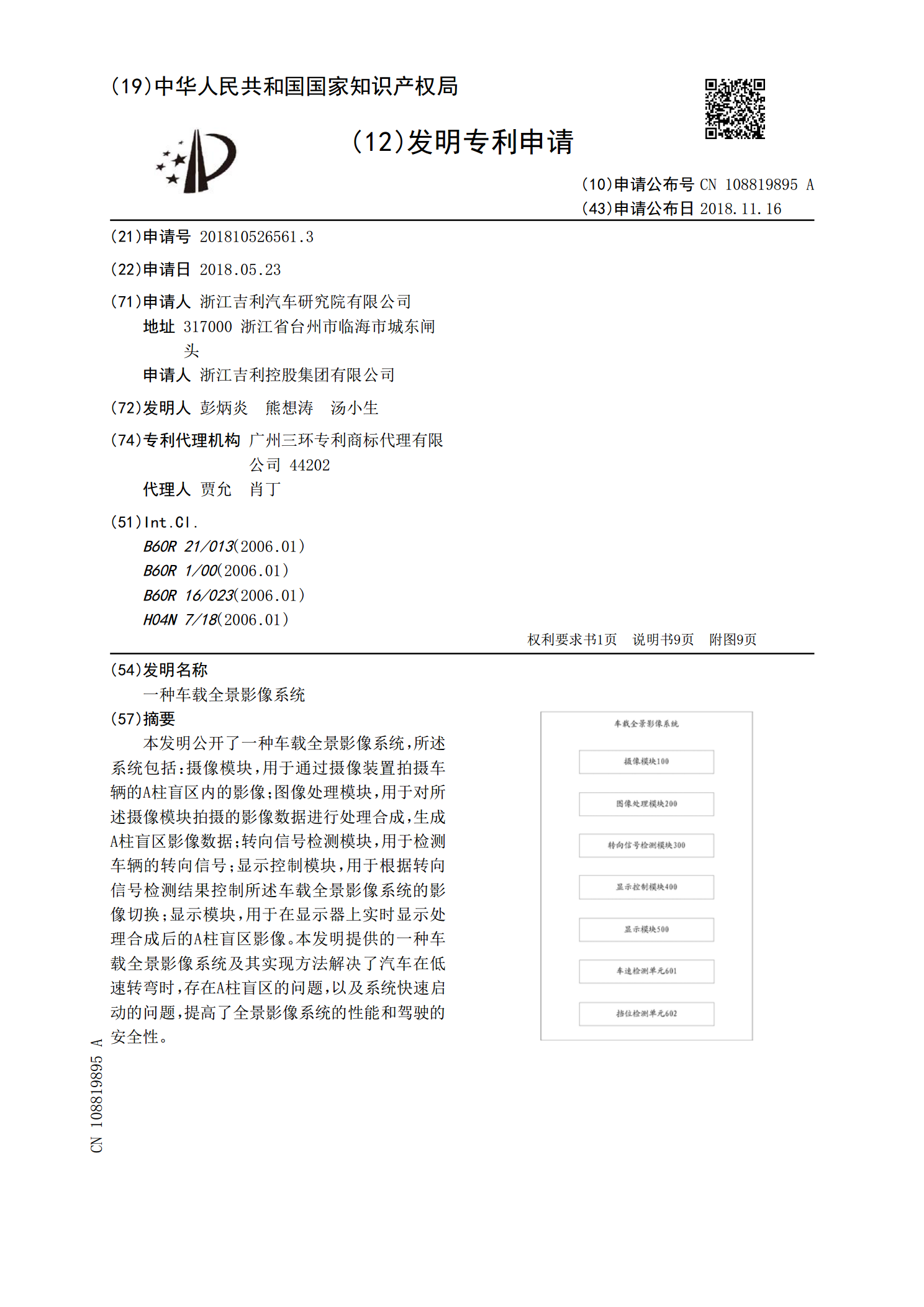
本发明公开一种全景泊车影像拼接标定方法及其标定物,在车辆的四周分别布置至少4个具有圆形特征的标定物;多次采集含有标定物的车辆区域图像;从含有标定物的车辆区域图像将标定物的圆形特征提取出来并封装为模板;同时提取处理得到用于训练和测试模板的测试集;将模板与测试集采用图像金子塔进行形状匹配,并利用最小二乘法优化匹配结果;形状匹配效果达标后将优化的数据按照空间位置、摄像头的布局进行分组和标签;将分组及标签的数据得到标定物各个拼接点的像素坐标;基于各个拼接点的像素坐标采用现有泊车影像拼接算法完成全景泊车影像的拼接。

车载高清全景影像系统研究.docx
车载高清全景影像系统研究车载高清全景影像系统研究摘要:车载高清全景影像系统是现代汽车技术中的一项重要创新,它通过多摄像头系统和图像处理技术,实现了车辆周围环境的全景展示。本文主要从车载高清全景影像系统的原理、应用和未来发展等方面进行研究分析,并对该技术的优势、局限以及相关挑战进行探讨。关键词:车载高清全景影像系统,多摄像头,图像处理技术,原理,应用1.引言车载高清全景影像系统是一种现代汽车技术中的重要创新。它以多摄像头系统作为核心,通过图像处理技术将不同摄像头的图像进行融合和处理,形成一个全景展示的图像,
基于棋盘格标定以实现全景影像系统画面拼接显示的方法.pdf
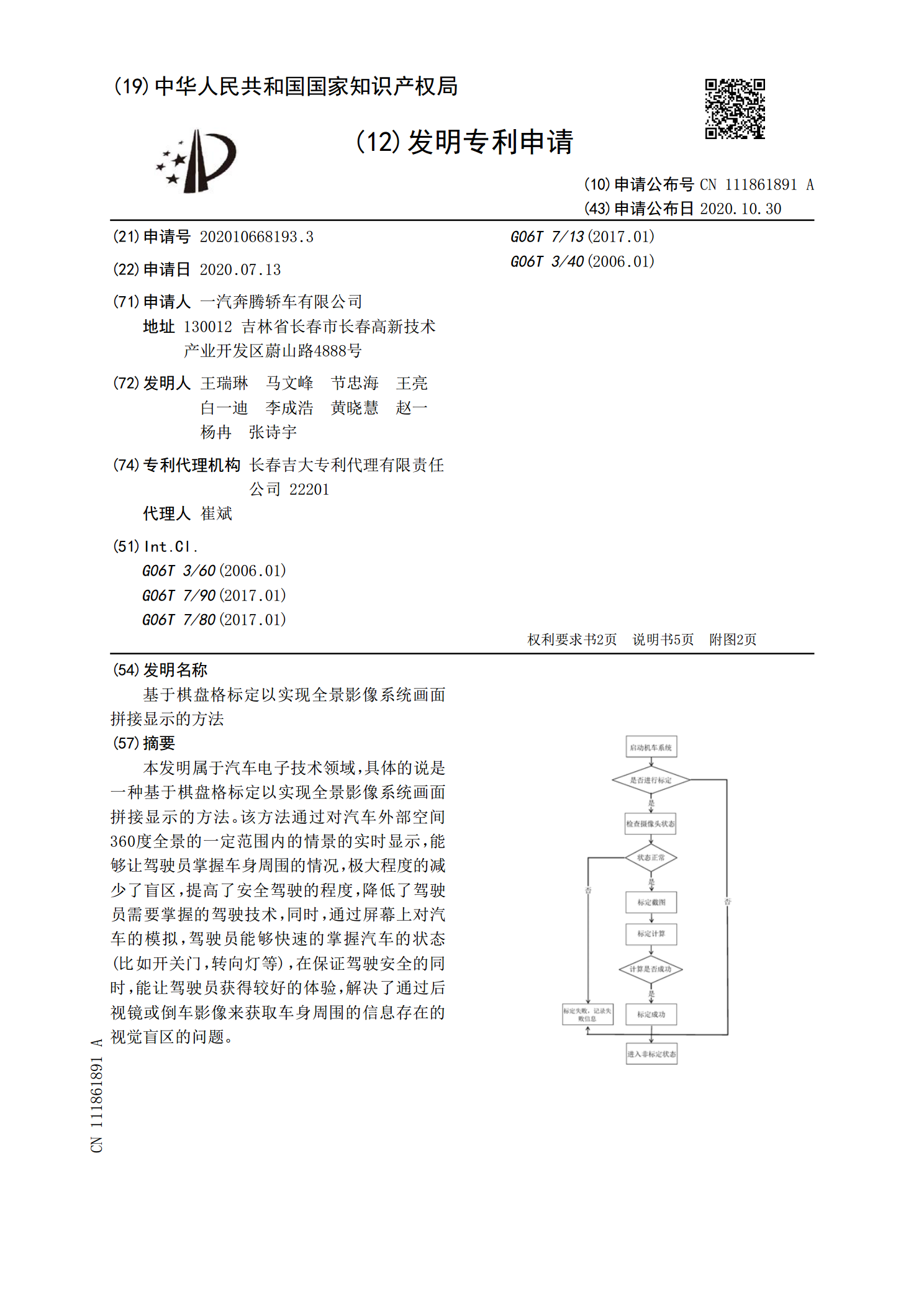
本发明属于汽车电子技术领域,具体的说是一种基于棋盘格标定以实现全景影像系统画面拼接显示的方法。该方法通过对汽车外部空间360度全景的一定范围内的情景的实时显示,能够让驾驶员掌握车身周围的情况,极大程度的减少了盲区,提高了安全驾驶的程度,降低了驾驶员需要掌握的驾驶技术,同时,通过屏幕上对汽车的模拟,驾驶员能够快速的掌握汽车的状态(比如开关门,转向灯等),在保证驾驶安全的同时,能让驾驶员获得较好的体验,解决了通过后视镜或倒车影像来获取车身周围的信息存在的视觉盲区的问题。