
介入手术机器人自动交替夹紧松开导丝装置.pdf

是你****辉呀


1/9

2/9
3/9

4/9
5/9
6/9

7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

介入手术机器人自动交替夹紧松开导丝装置.pdf
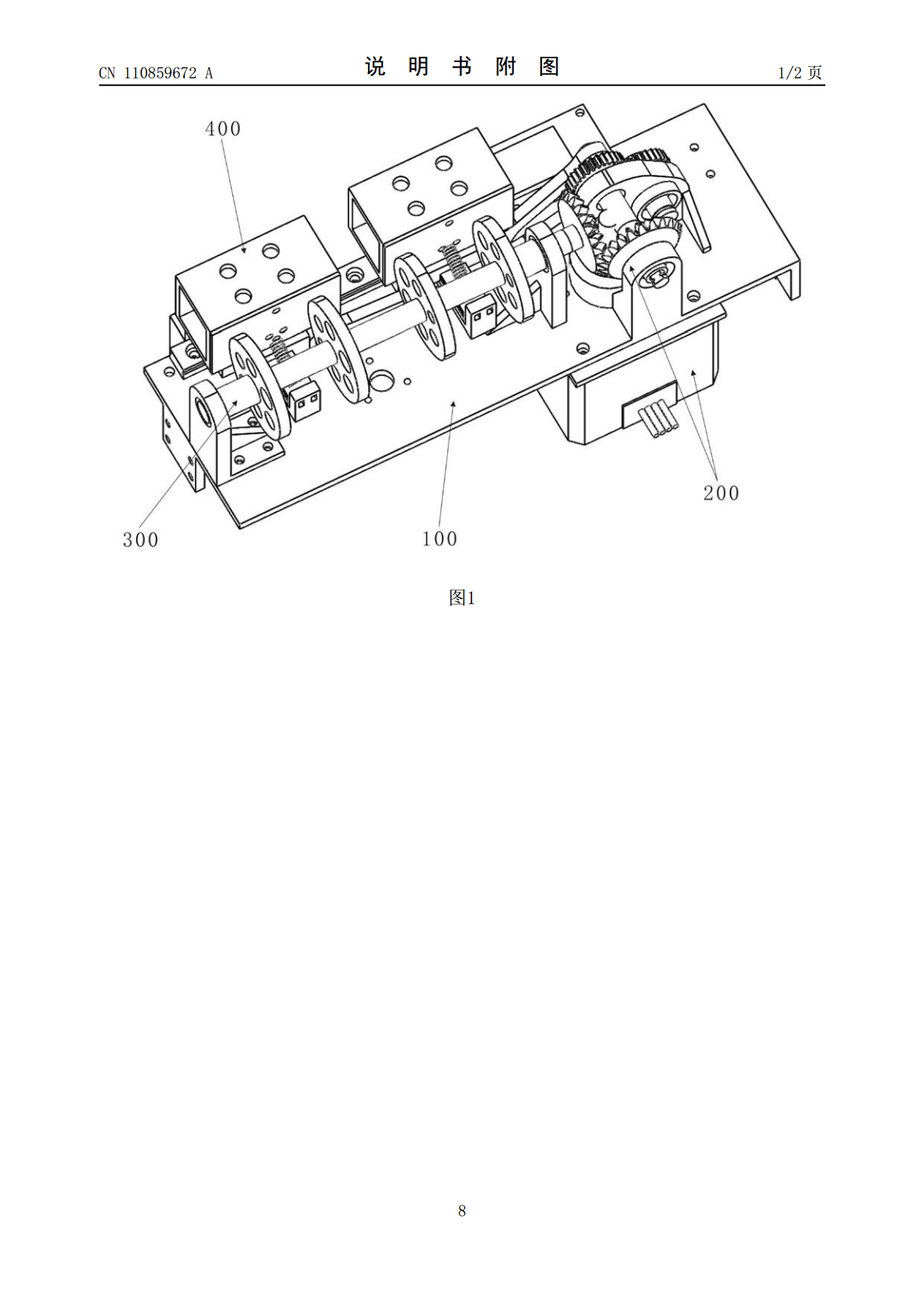
本发明公开了一种介入手术机器人自动交替夹紧松开导丝装置,包括基准安装板、动力组件、凸轮组件和移动组件;动力组件包括步进电机、齿轮组,步进电机带动齿轮组转动;凸轮组件包括两个直角连接件、一个凸轮轴以及数个凸轮,齿轮组带动凸轮轴转动;移动组件包括一直线长导轨、滑块一、连接件、短导轨、滑块二、方管连接件、拉簧等。本发明装置整体结构简单,成本低廉,采用模块化结构设计,拆装组合简便,结构紧凑。该装置采用交替夹紧、松开导丝,辅助实现了往复运动的过程,可以在很小的体积范围内,达到同医生实际介入手术操作一样的效果。
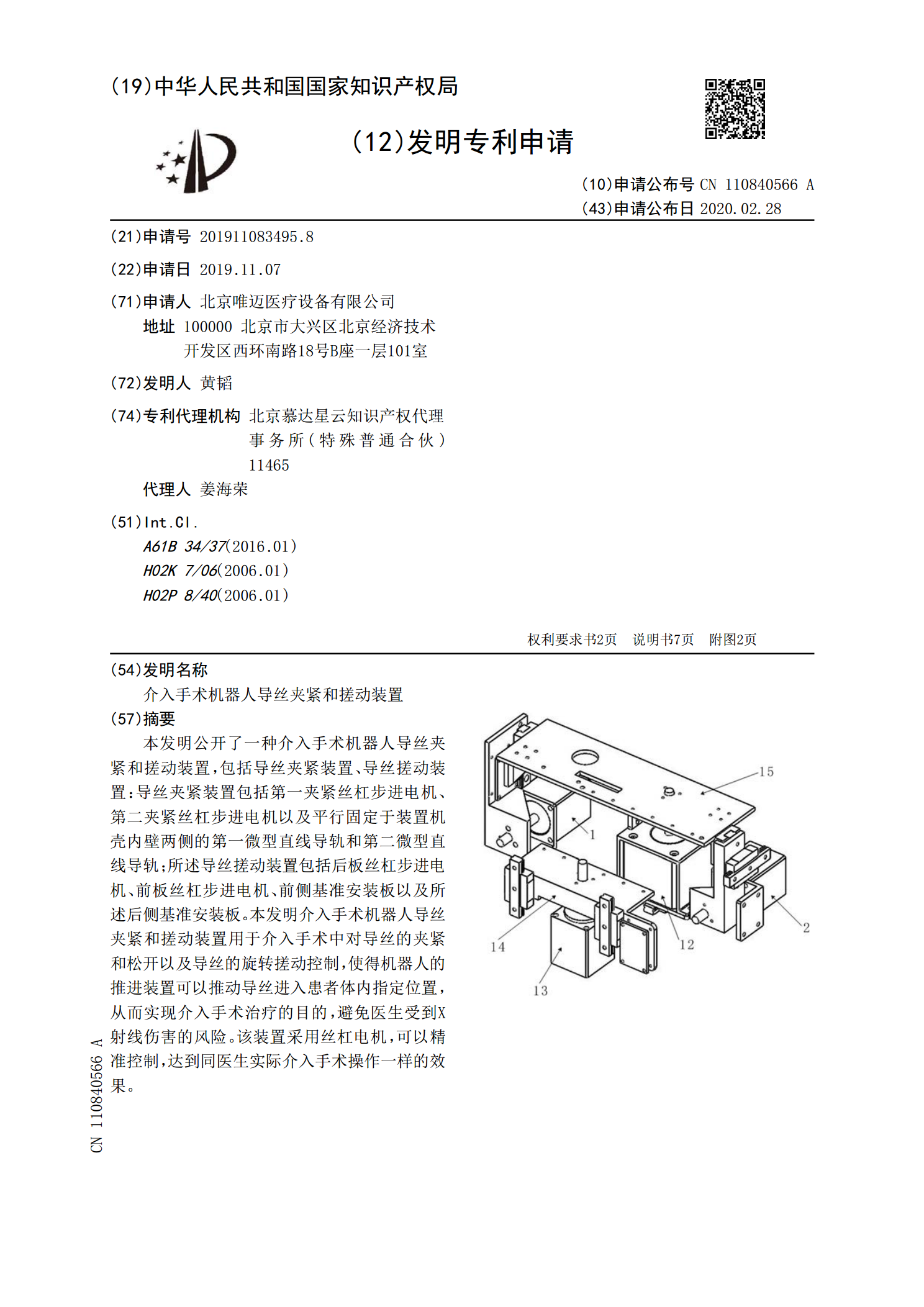
介入手术机器人导丝夹紧和搓动装置.pdf
本发明公开了一种介入手术机器人导丝夹紧和搓动装置,包括导丝夹紧装置、导丝搓动装置:导丝夹紧装置包括第一夹紧丝杠步进电机、第二夹紧丝杠步进电机以及平行固定于装置机壳内壁两侧的第一微型直线导轨和第二微型直线导轨;所述导丝搓动装置包括后板丝杠步进电机、前板丝杠步进电机、前侧基准安装板以及所述后侧基准安装板。本发明介入手术机器人导丝夹紧和搓动装置用于介入手术中对导丝的夹紧和松开以及导丝的旋转搓动控制,使得机器人的推进装置可以推动导丝进入患者体内指定位置,从而实现介入手术治疗的目的,避免医生受到X射线伤害的风险。该

介入手术机器人导管自动夹紧打开装置.pdf
本发明公开了一种介入手术机器人导管自动夹紧打开装置,包括导管夹持端和检测端:导管夹持端包括步进电机、舵机、主动摩擦轮、从动摩擦轮、舵机连杆、导轨连接板、微型直线导轨、滑块、从动轮连接件、拉簧等;检测端连接消毒盒的盒盖,盒盖处于盖住状态时,检测端发出关闭信号;盒盖处于打开状态时,检测端发出打开信号;舵机接收到打开信号和关闭信号后,带动舵机连杆以及从动轮连接件实现主动摩擦轮与从动摩擦轮的分离以及重新咬合。本发明装置用于介入手术中对导管的夹紧和松开自动控制,使得机器人的推进装置可以快速更换球囊或支架导管,方便医

用于导丝夹紧的气动装置及介入手术机器人.pdf
本发明提供了一种用于导丝夹紧的气动装置及介入手术机器人,包括导丝输送装置和导丝夹紧装置,导丝输送装置包括驱动轮组件和从动轮组件,导丝夹紧装置驱动从动轮组件靠近或远离驱动轮组件;从动轮组件和驱动轮组件二者夹持导丝,从动轮组件和驱动轮组件二者均与导丝转动配合;还包括支撑结构和导丝旋转机构,导丝旋转机构、导丝输送装置以及导丝夹紧装置均安装在支撑结构上,导丝旋转机构驱动导丝输送装置和导丝夹紧装置转动,导丝旋转机构上设置有连通气路,连通气路与左进气道和右进气道连通。采用气体驱动的导丝夹紧装置推动从动轮组件靠近或远离
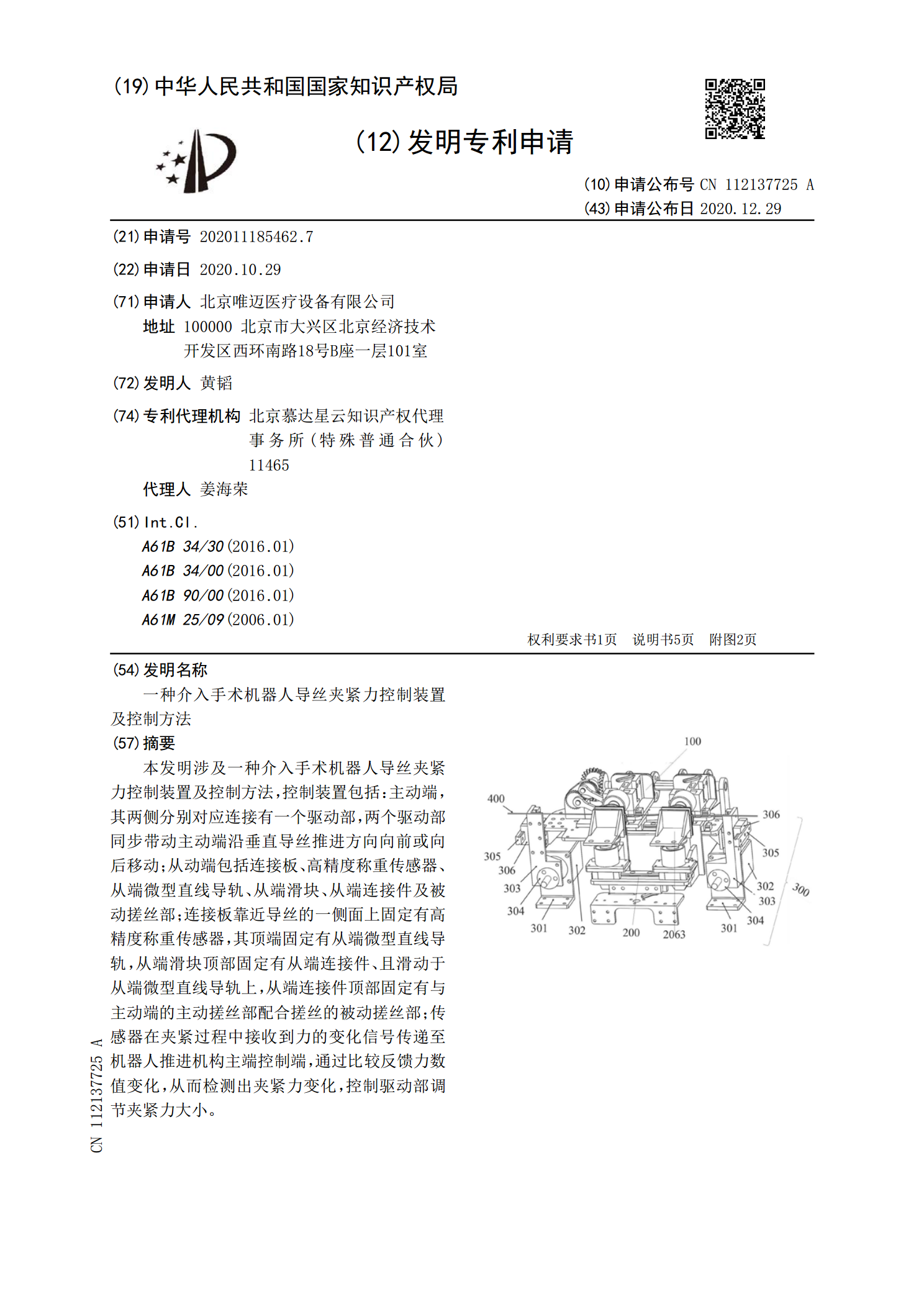
一种介入手术机器人导丝夹紧力控制装置及控制方法.pdf
本发明涉及一种介入手术机器人导丝夹紧力控制装置及控制方法,控制装置包括:主动端,其两侧分别对应连接有一个驱动部,两个驱动部同步带动主动端沿垂直导丝推进方向向前或向后移动;从动端包括连接板、高精度称重传感器、从端微型直线导轨、从端滑块、从端连接件及被动搓丝部;连接板靠近导丝的一侧面上固定有高精度称重传感器,其顶端固定有从端微型直线导轨,从端滑块顶部固定有从端连接件、且滑动于从端微型直线导轨上,从端连接件顶部固定有与主动端的主动搓丝部配合搓丝的被动搓丝部;传感器在夹紧过程中接收到力的变化信号传递至机器人推进机