
一种基于激光SLAM的机器人码垛控制方法及其控制系统.pdf

Ja****23

1/8

2/8
3/8

4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于激光SLAM的机器人码垛控制方法及其控制系统.pdf
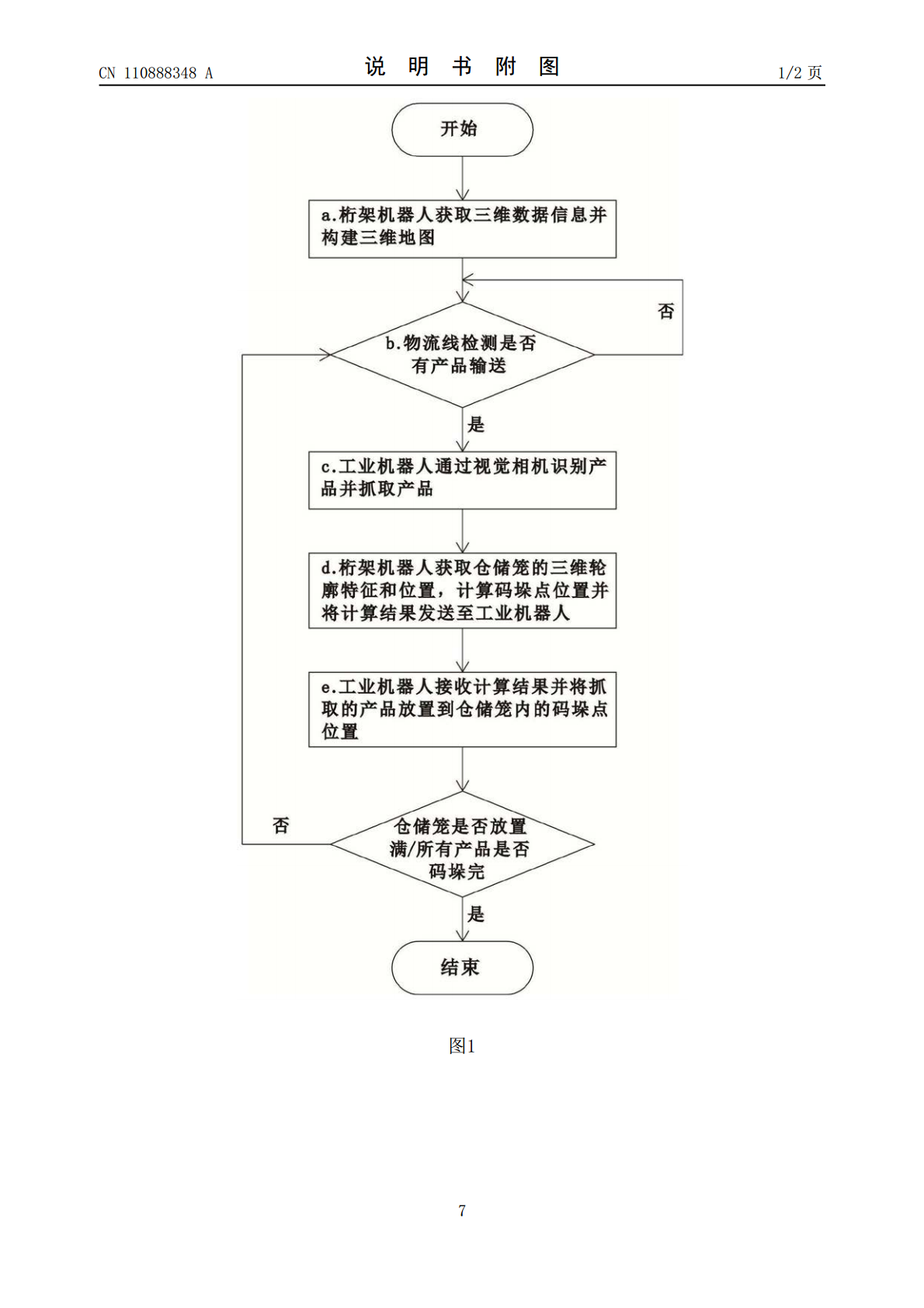
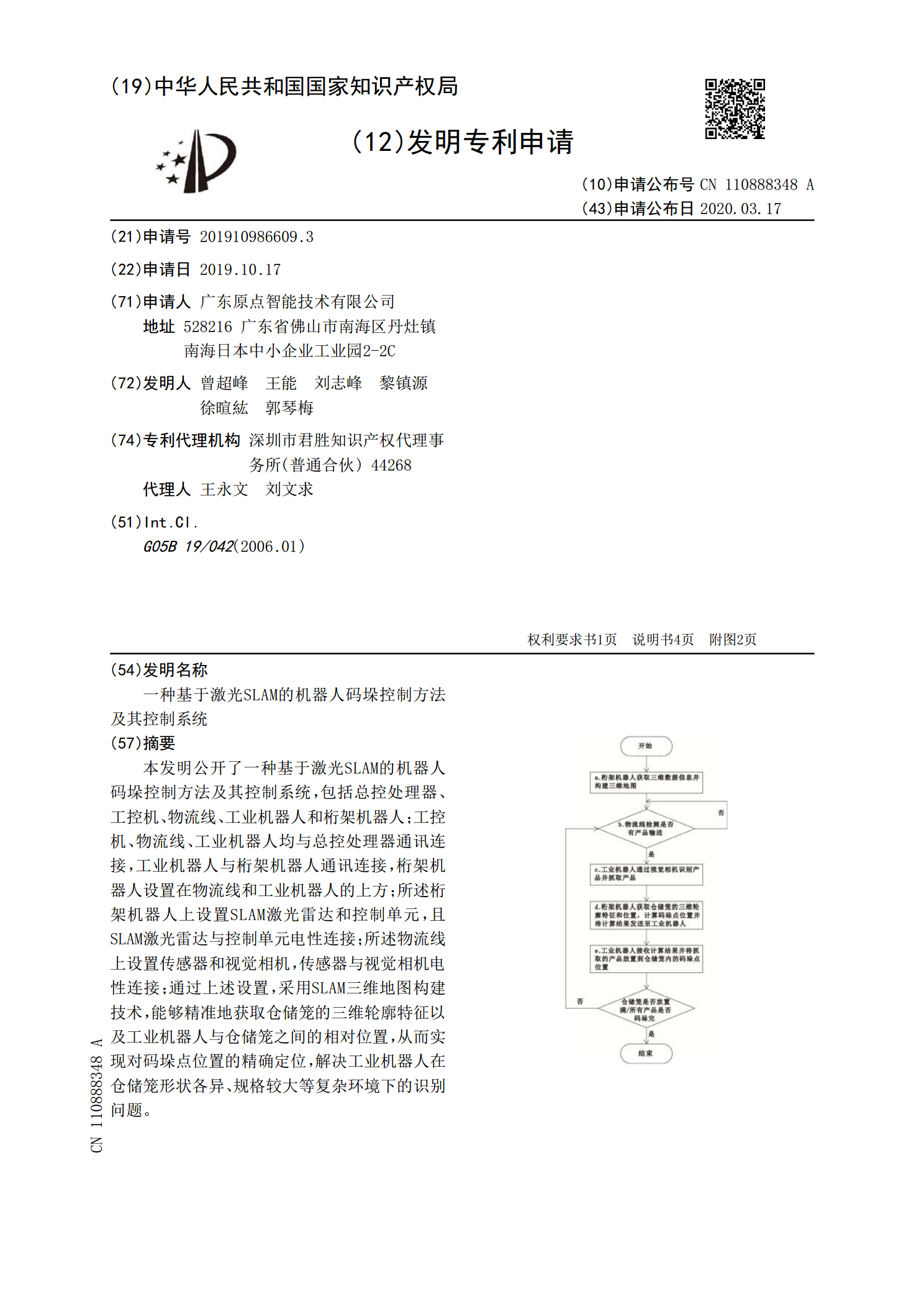
本发明公开了一种基于激光SLAM的机器人码垛控制方法及其控制系统,包括总控处理器、工控机、物流线、工业机器人和桁架机器人;工控机、物流线、工业机器人均与总控处理器通讯连接,工业机器人与桁架机器人通讯连接,桁架机器人设置在物流线和工业机器人的上方;所述桁架机器人上设置SLAM激光雷达和控制单元,且SLAM激光雷达与控制单元电性连接;所述物流线上设置传感器和视觉相机,传感器与视觉相机电性连接;通过上述设置,采用SLAM三维地图构建技术,能够精准地获取仓储笼的三维轮廓特征以及工业机器人与仓储笼之间的相对位置,从
一种基于激光SLAM的机器人码垛控制方法.pdf
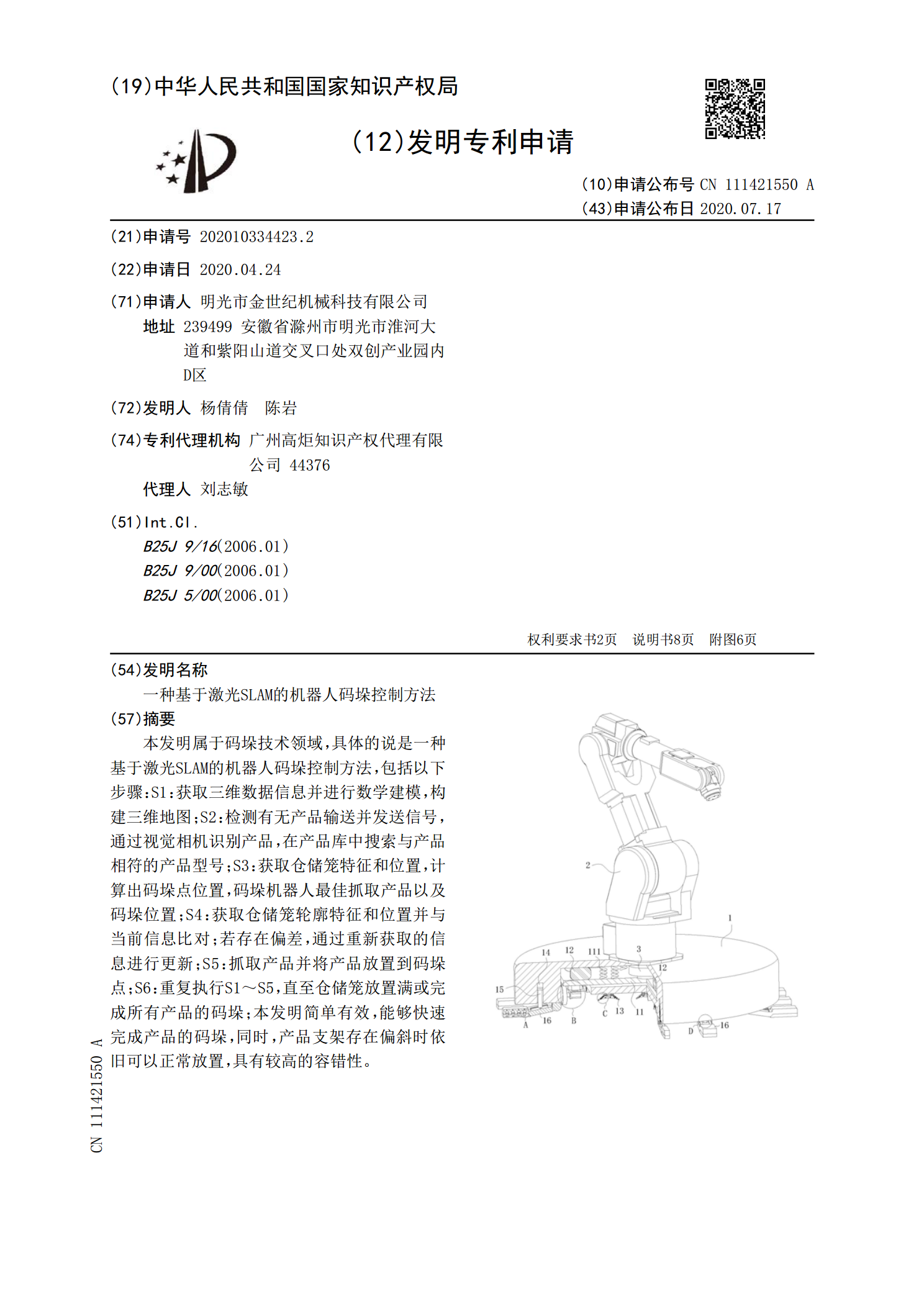
本发明属于码垛技术领域,具体的说是一种基于激光SLAM的机器人码垛控制方法,包括以下步骤:S1:获取三维数据信息并进行数学建模,构建三维地图;S2:检测有无产品输送并发送信号,通过视觉相机识别产品,在产品库中搜索与产品相符的产品型号;S3:获取仓储笼特征和位置,计算出码垛点位置,码垛机器人最佳抓取产品以及码垛位置;S4:获取仓储笼轮廓特征和位置并与当前信息比对;若存在偏差,通过重新获取的信息进行更新;S5:抓取产品并将产品放置到码垛点;S6:重复执行S1~S5,直至仓储笼放置满或完成所有产品的码垛;本发明
一种码垛机器人及其控制方法.pdf
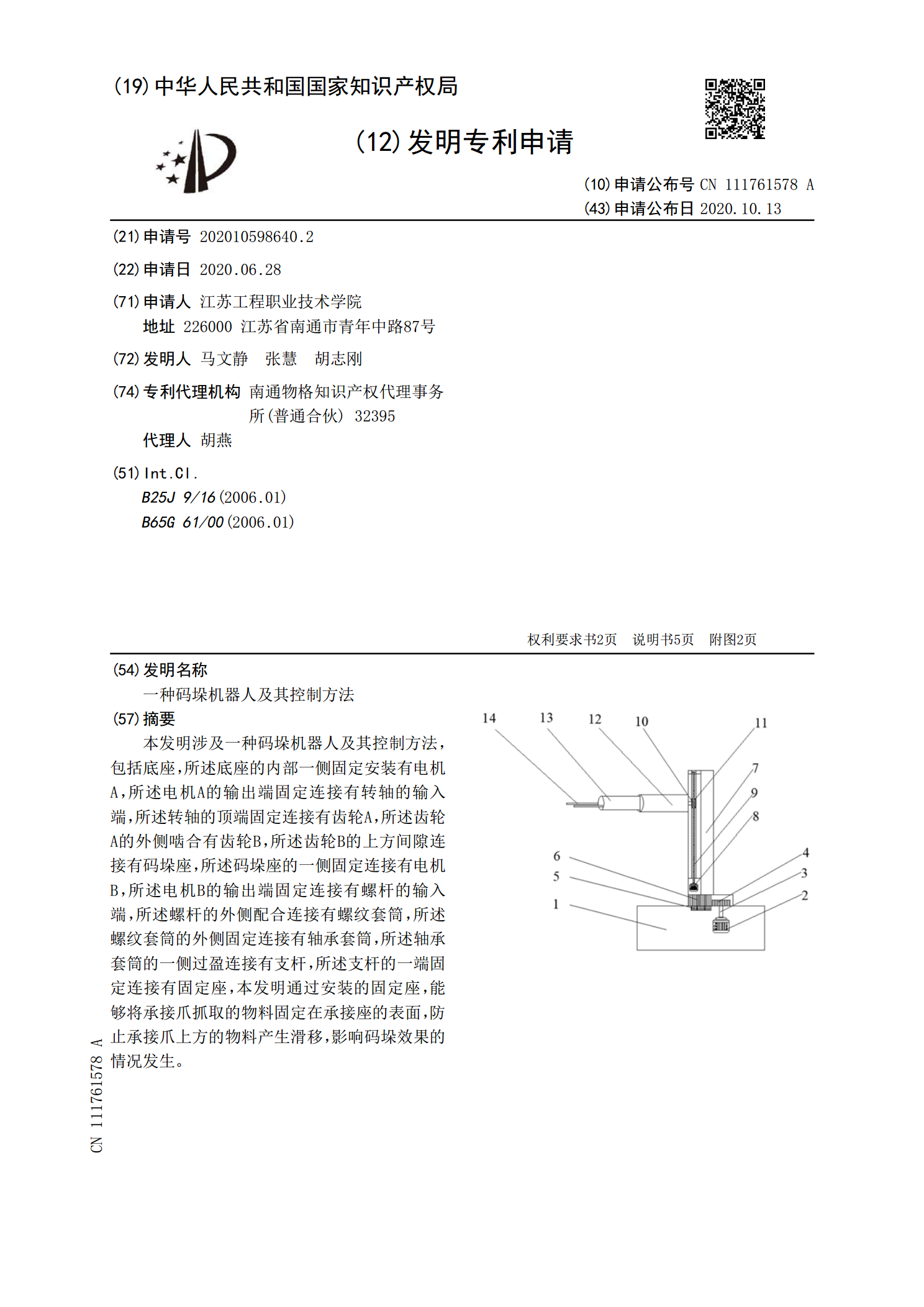
本发明涉及一种码垛机器人及其控制方法,包括底座,所述底座的内部一侧固定安装有电机A,所述电机A的输出端固定连接有转轴的输入端,所述转轴的顶端固定连接有齿轮A,所述齿轮A的外侧啮合有齿轮B,所述齿轮B的上方间隙连接有码垛座,所述码垛座的一侧固定连接有电机B,所述电机B的输出端固定连接有螺杆的输入端,所述螺杆的外侧配合连接有螺纹套筒,所述螺纹套筒的外侧固定连接有轴承套筒,所述轴承套筒的一侧过盈连接有支杆,所述支杆的一端固定连接有固定座,本发明通过安装的固定座,能够将承接爪抓取的物料固定在承接座的表面,防止承接
一种基于SLAM的环卫机器人路径跟踪控制系统及方法.pdf
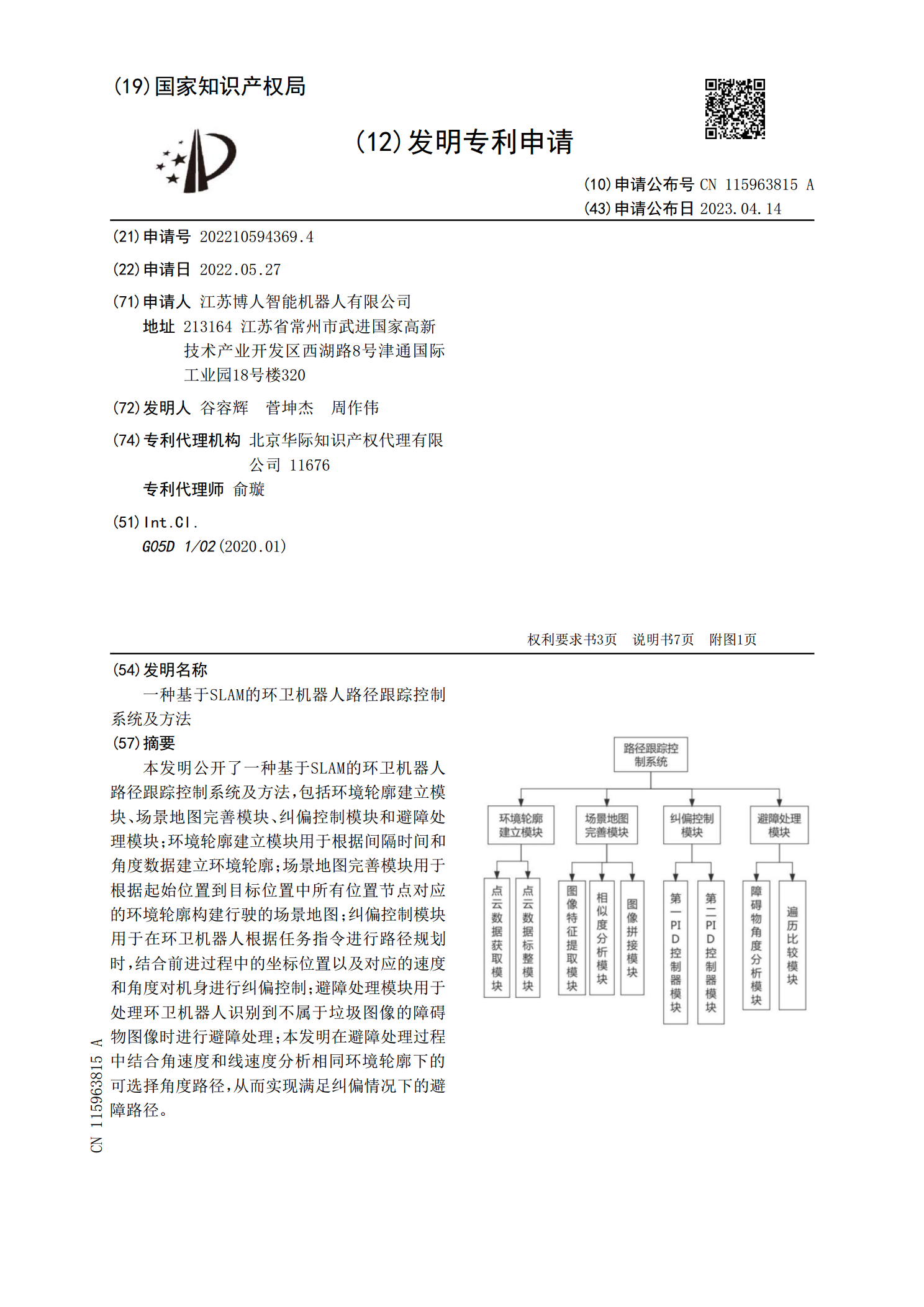
本发明公开了一种基于SLAM的环卫机器人路径跟踪控制系统及方法,包括环境轮廓建立模块、场景地图完善模块、纠偏控制模块和避障处理模块;环境轮廓建立模块用于根据间隔时间和角度数据建立环境轮廓;场景地图完善模块用于根据起始位置到目标位置中所有位置节点对应的环境轮廓构建行驶的场景地图;纠偏控制模块用于在环卫机器人根据任务指令进行路径规划时,结合前进过程中的坐标位置以及对应的速度和角度对机身进行纠偏控制;避障处理模块用于处理环卫机器人识别到不属于垃圾图像的障碍物图像时进行避障处理;本发明在避障处理过程中结合角速度和

一种码垛机器人控制系统.pdf
本发明提供一种码垛机器人控制系统,属于机器人智能控制技术领域,包括控制器、显示终端、传感器组、摄像头、电磁阀组、信号调理电路、报警器;传感器组包括触觉传感器,压力传感器,重量传感器,电磁阀组包括机械夹电磁阀,电磁阀用于控制机械夹的松合;触觉传感器用于检测码垛箱体轮廓,重量传感器用于测定码垛箱体重量,压力传感器用于检测机械夹异常抓取检测;摄像头用于回传图像。本发明通过多传感器对信息数据的采集处理,在码垛过程中实现机器人识别、夹取、码垛全自动控制,提高了码垛机器人的工作效率,增强了码垛机器人自动化水平,减少人