
一种基于SLAM的环卫机器人路径跟踪控制系统及方法.pdf

秀美****甜v


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于SLAM的环卫机器人路径跟踪控制系统及方法.pdf
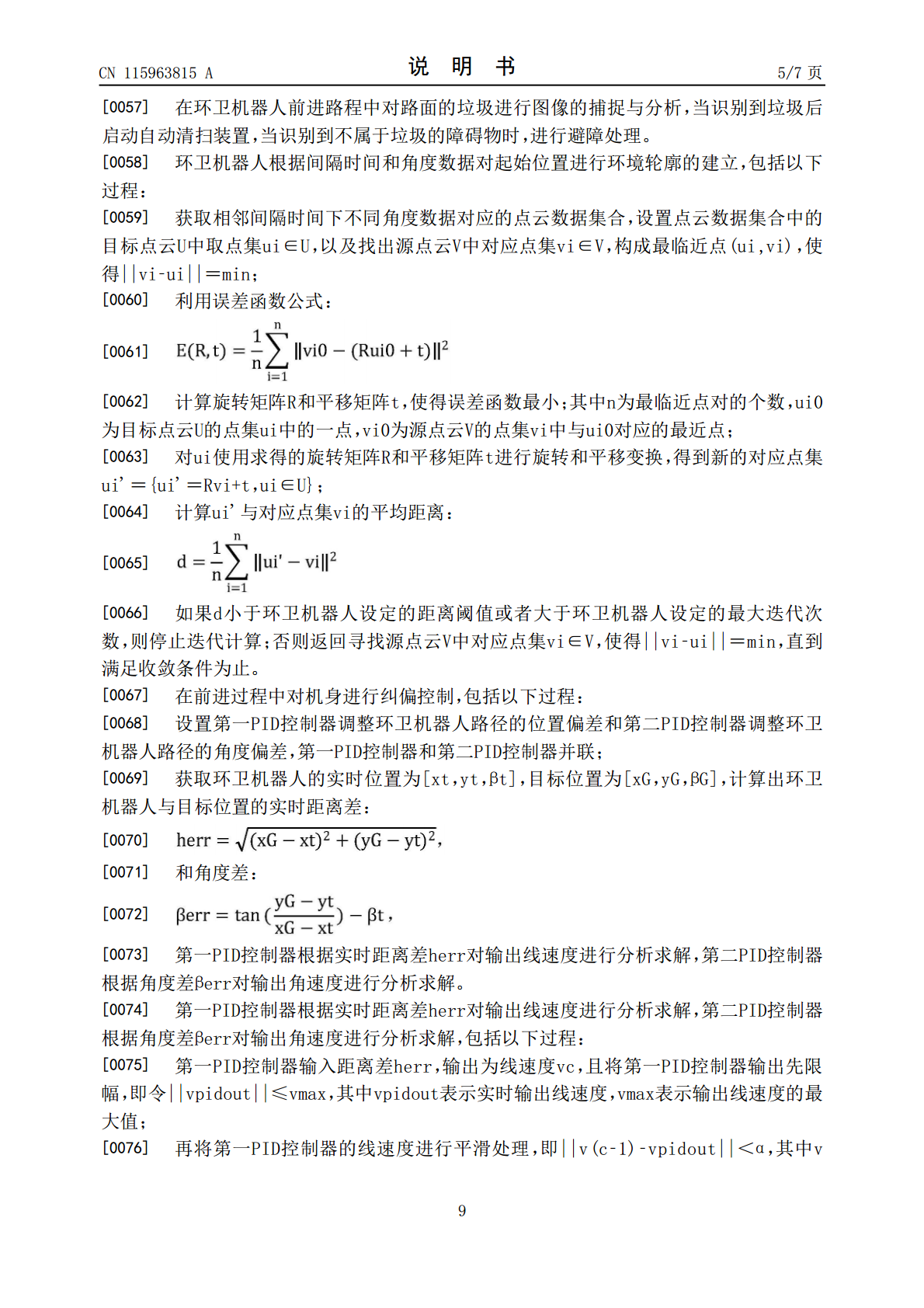
本发明公开了一种基于SLAM的环卫机器人路径跟踪控制系统及方法,包括环境轮廓建立模块、场景地图完善模块、纠偏控制模块和避障处理模块;环境轮廓建立模块用于根据间隔时间和角度数据建立环境轮廓;场景地图完善模块用于根据起始位置到目标位置中所有位置节点对应的环境轮廓构建行驶的场景地图;纠偏控制模块用于在环卫机器人根据任务指令进行路径规划时,结合前进过程中的坐标位置以及对应的速度和角度对机身进行纠偏控制;避障处理模块用于处理环卫机器人识别到不属于垃圾图像的障碍物图像时进行避障处理;本发明在避障处理过程中结合角速度和
一种基于激光SLAM的机器人码垛控制方法及其控制系统.pdf
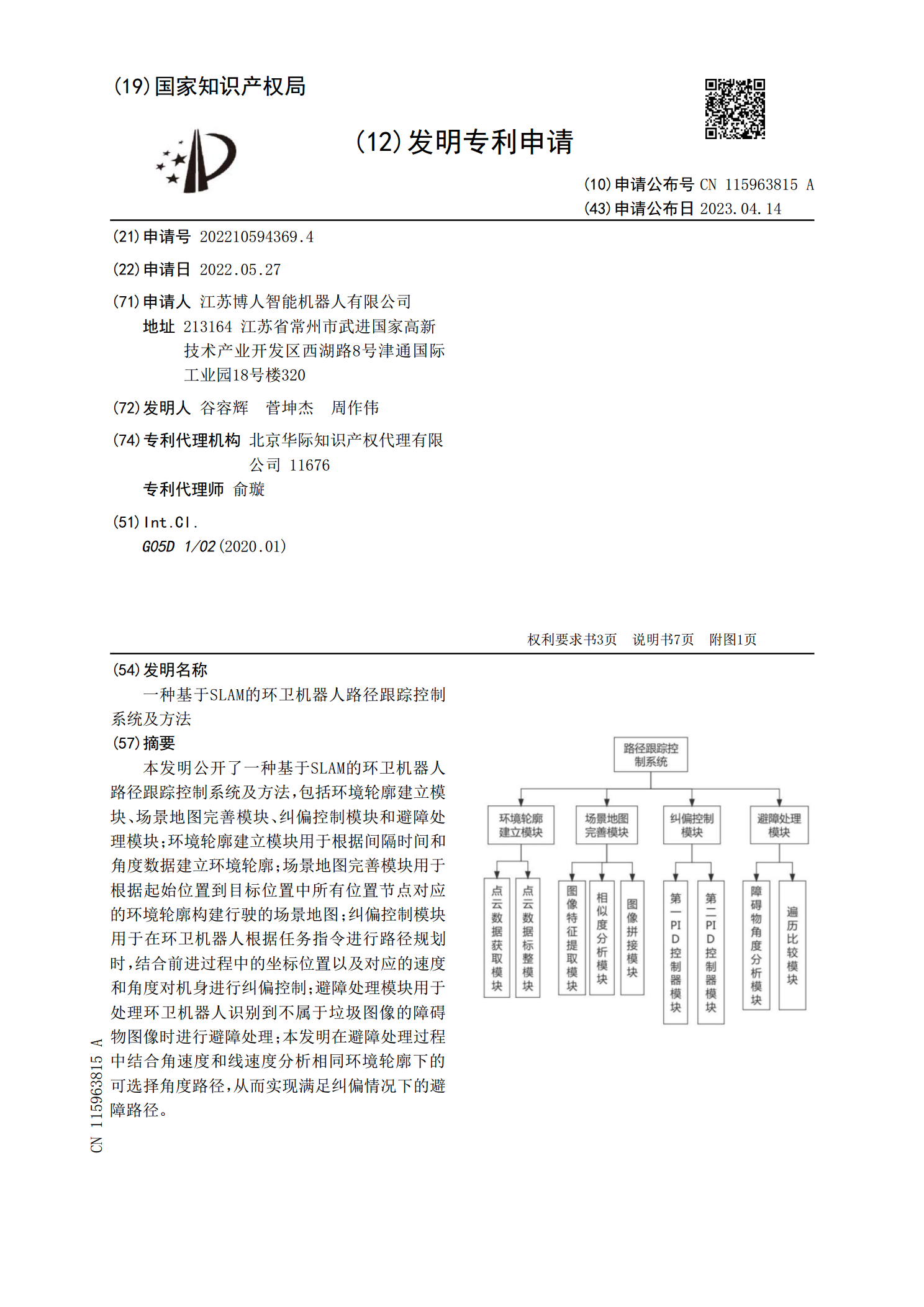
本发明公开了一种基于激光SLAM的机器人码垛控制方法及其控制系统,包括总控处理器、工控机、物流线、工业机器人和桁架机器人;工控机、物流线、工业机器人均与总控处理器通讯连接,工业机器人与桁架机器人通讯连接,桁架机器人设置在物流线和工业机器人的上方;所述桁架机器人上设置SLAM激光雷达和控制单元,且SLAM激光雷达与控制单元电性连接;所述物流线上设置传感器和视觉相机,传感器与视觉相机电性连接;通过上述设置,采用SLAM三维地图构建技术,能够精准地获取仓储笼的三维轮廓特征以及工业机器人与仓储笼之间的相对位置,从

一种Slam算法优化基于模型的跟踪方法.pdf
本发明公开了一种Slam算法优化基于模型的跟踪方法,包括步骤S1、对目标物进行初始化,得到目标物在图像中的精确位姿,确定目标物的边沿;S2、进行边沿追踪,确定目标物运动之后的位姿;S3、使用SLAM算法对目标物所在新的图像位置进行点云提取;S4、点云匹配,确定目标物的精确位姿;本发明中,相对于传统AR技术中使用人工标志点或者自然特征点方式进行视点定位,创新性的针对风机舱内环境特征纹理比较贫乏的问题将半稠密边缘SLAM技术应用到AR视点定位中。半稠密SLAM技术利用图像中的边缘特征同时完成场景三维重建和视点

基于路径边沿引导策略的蛇形机器人路径跟踪方法.docx
基于路径边沿引导策略的蛇形机器人路径跟踪方法摘要路径跟踪问题一直是机器人领域中的研究热点。本篇论文提出了一种基于路径边沿引导策略的蛇形机器人路径跟踪方法。该方法在机器人沿着路径行进时,通过边沿信息的检测和处理,实现了路径跟踪的高精度和高效率。同时,蛇形机器人的特殊结构也为该方法的实现提供了良好的物理基础。实验结果表明,该方法能够使机器人快速而准确地跟踪路径,并在多种复杂环境下取得了良好的效果。关键词:路径跟踪;路径边沿引导;蛇形机器人;机器人控制;机器人视觉AbstractPathtrackinghasa

一种基于改进SLAM的增强现实跟踪注册方法.docx
一种基于改进SLAM的增强现实跟踪注册方法一种基于改进SLAM的增强现实跟踪注册方法摘要随着增强现实(AR)技术的快速发展,高精度的实时跟踪和注册成为实现增强现实体验的关键问题。同时,基于同时定位与地图构建(SLAM)的方法被广泛应用于室内和室外的实时定位与地图构建。然而,传统的SLAM方法在复杂环境下仍面临一些挑战,例如动态场景和光照变化。本论文提出了一种基于改进SLAM的增强现实跟踪注册方法,结合深度学习和传统的图像处理技术,以提高跟踪和注册的鲁棒性和准确性。实验证明,所提出的方法在各种环境下具有较高