
一种高刚度盘绕式伸展机构.pdf

篷璐****爱吗


1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高刚度盘绕式伸展机构.pdf
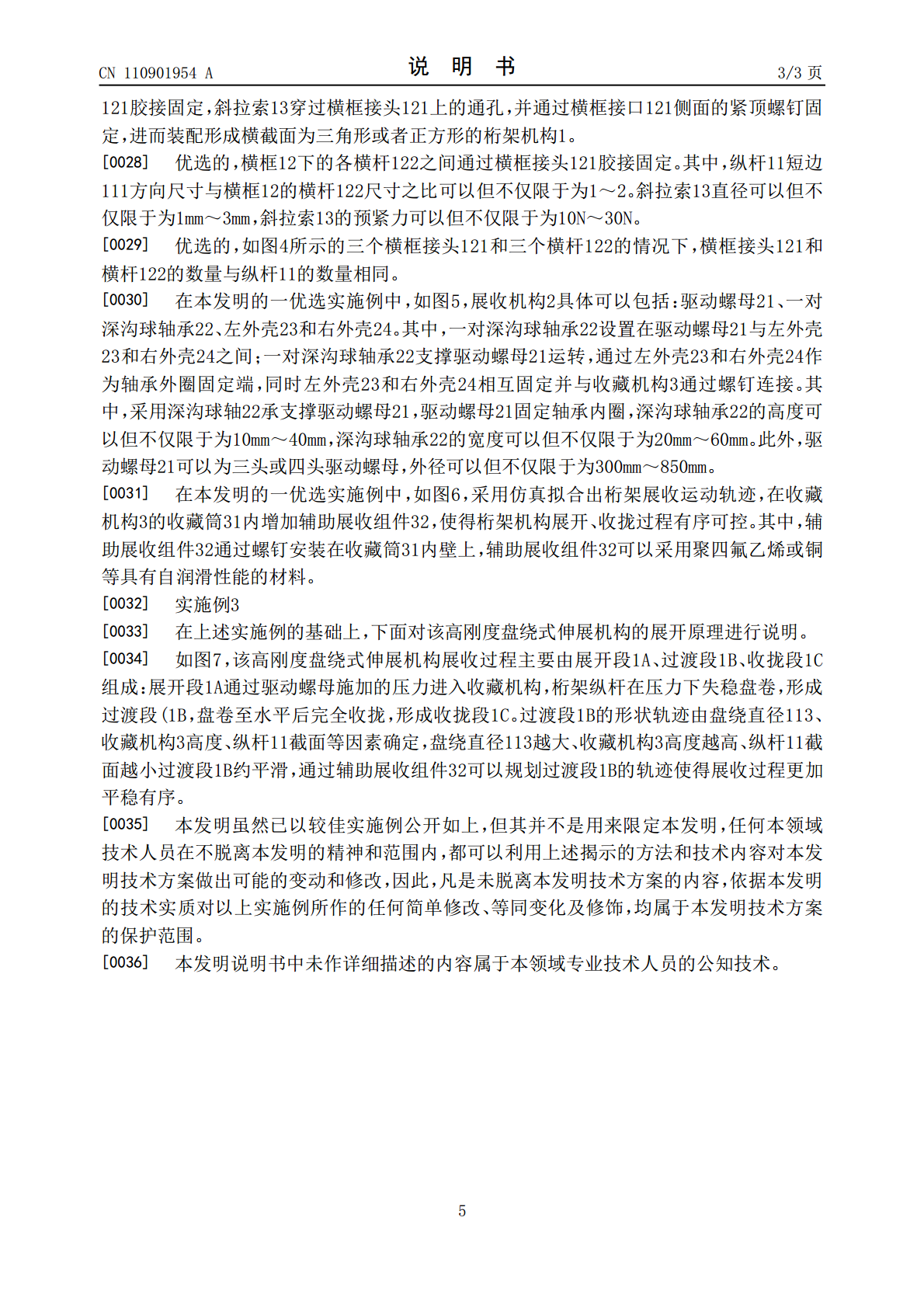
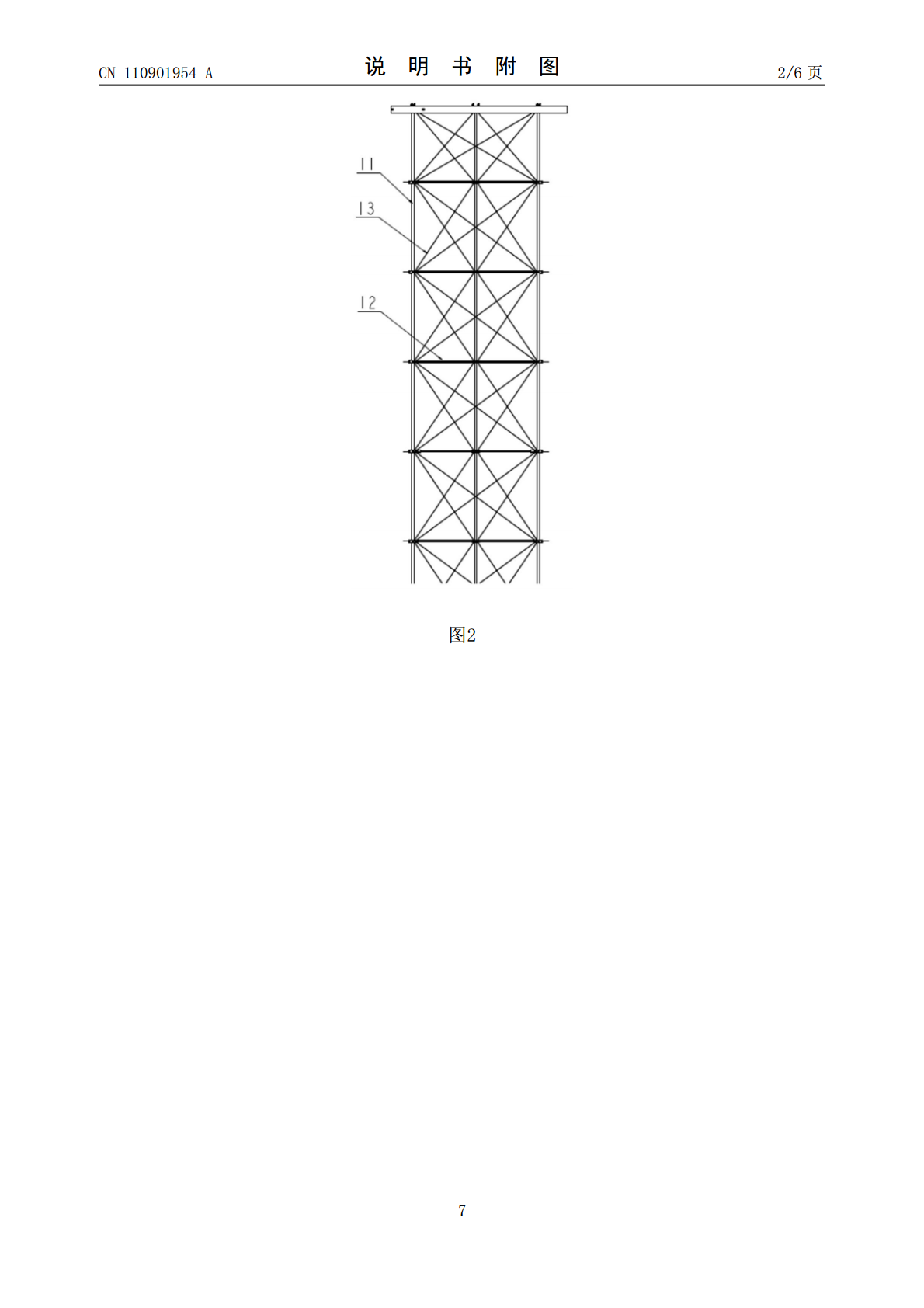
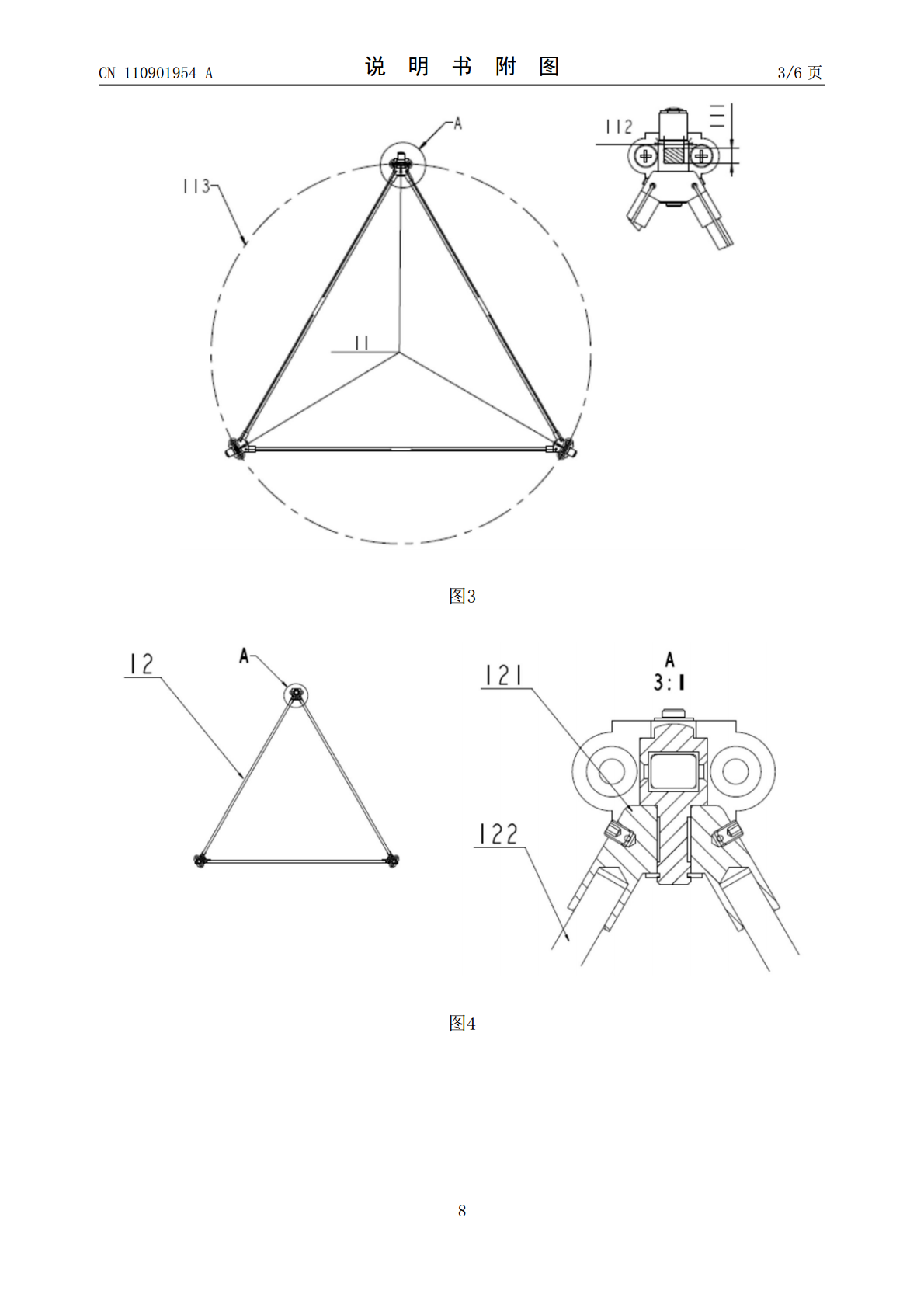
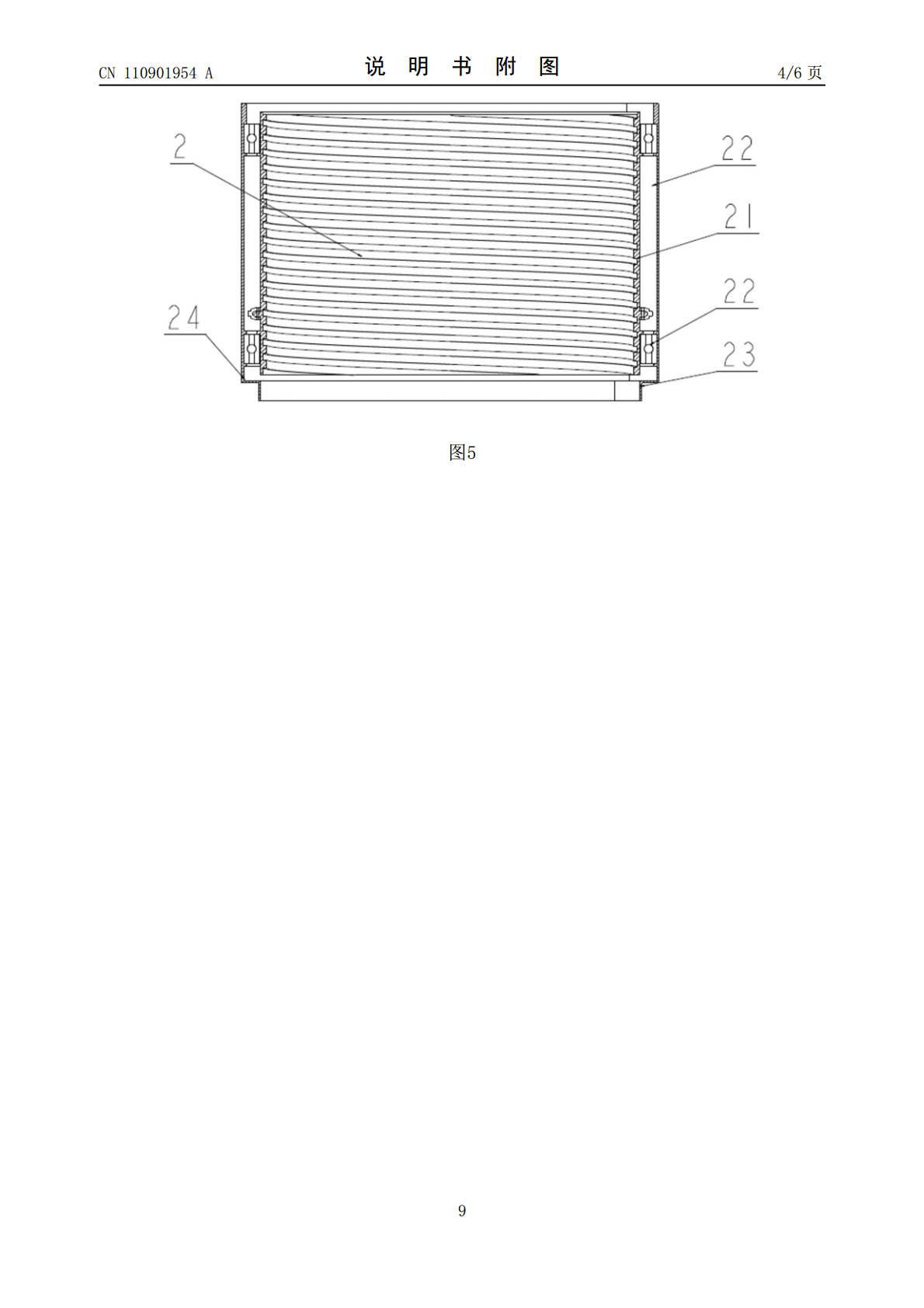
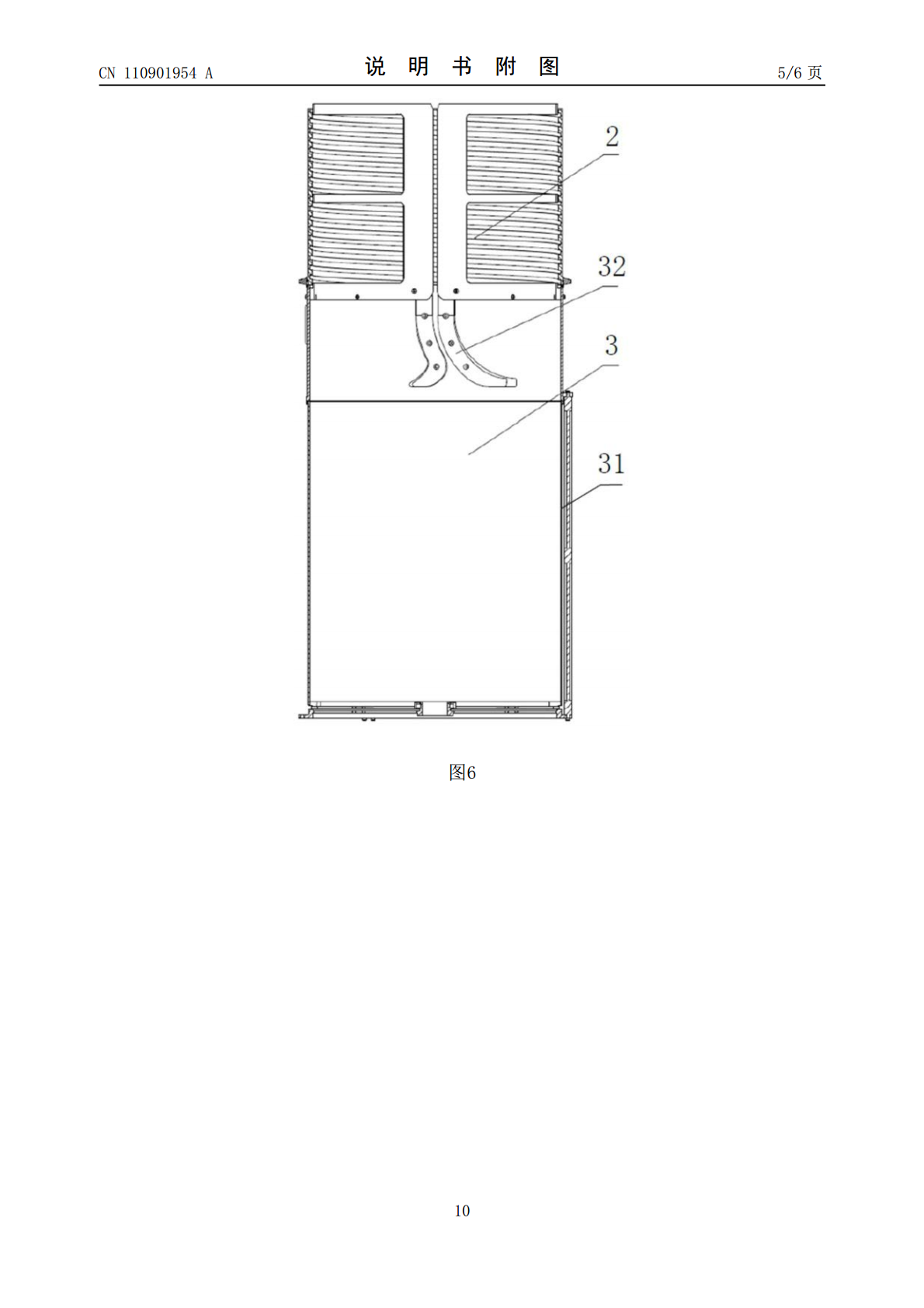
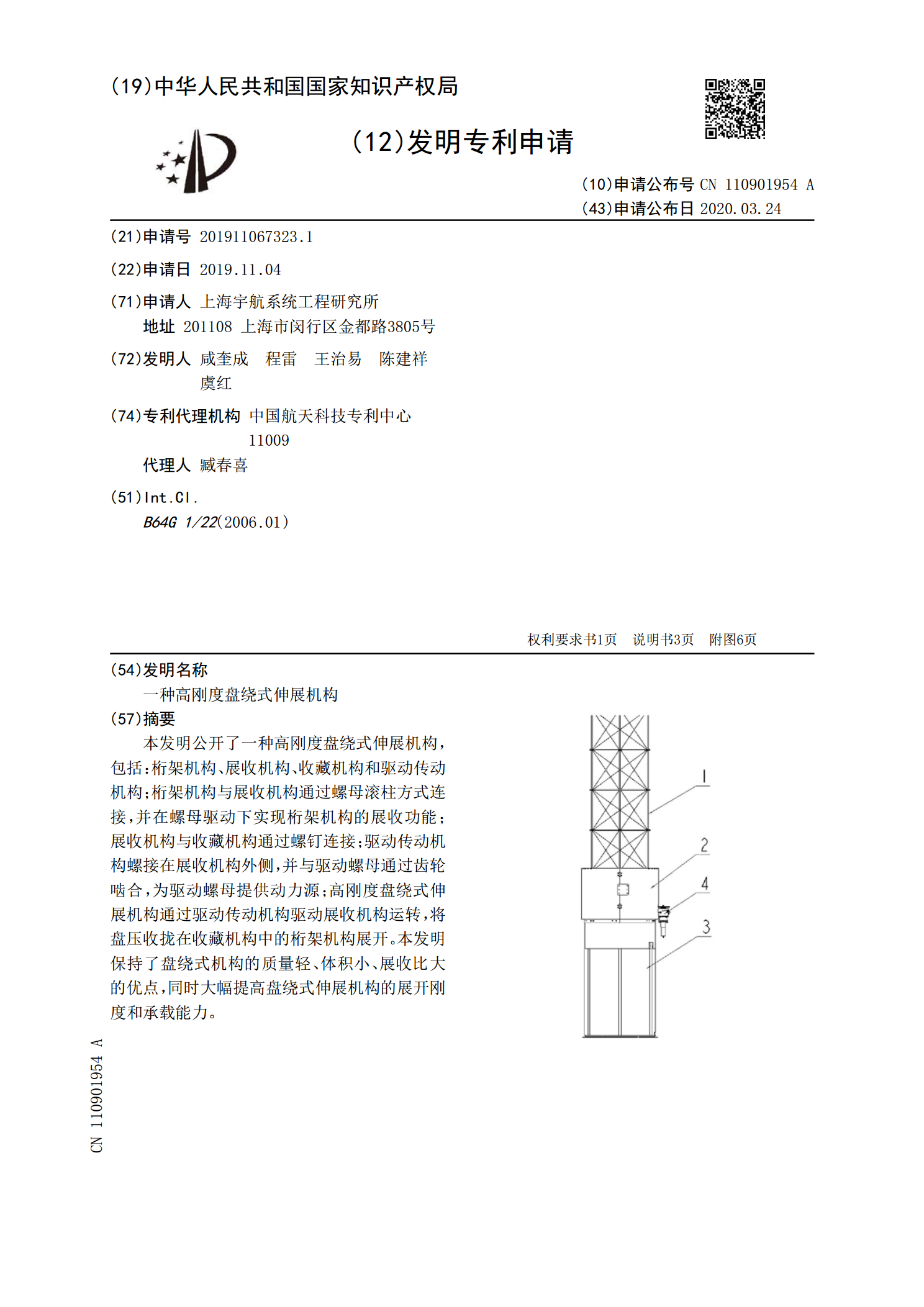
本发明公开了一种高刚度盘绕式伸展机构,包括:桁架机构、展收机构、收藏机构和驱动传动机构;桁架机构与展收机构通过螺母滚柱方式连接,并在螺母驱动下实现桁架机构的展收功能;展收机构与收藏机构通过螺钉连接;驱动传动机构螺接在展收机构外侧,并与驱动螺母通过齿轮啮合,为驱动螺母提供动力源;高刚度盘绕式伸展机构通过驱动传动机构驱动展收机构运转,将盘压收拢在收藏机构中的桁架机构展开。本发明保持了盘绕式机构的质量轻、体积小、展收比大的优点,同时大幅提高盘绕式伸展机构的展开刚度和承载能力。

盘绕式伸展臂初步设计与分析.docx
盘绕式伸展臂初步设计与分析标题:盘绕式伸展臂初步设计与分析摘要:盘绕式伸展臂是一种常见的机械装置,广泛应用于各个领域,如工业生产线、航天飞行器和医疗设备等。本文以盘绕式伸展臂的初步设计与分析为题,介绍了盘绕式伸展臂的工作原理、设计方法与分析过程,以及其在工程实践中的应用场景。通过对盘绕式伸展臂的设计与分析,提高其稳定性和可靠性,满足不同领域对机械臂的需求。关键词:盘绕式伸展臂、初步设计、工作原理、分析、应用场景一、引言盘绕式伸展臂是一种具有多个关节的机械臂,其结构特点在于可伸缩和可旋转。盘绕式伸展臂广泛应
一种基于Stewart平台主动控制的空间盘绕式伸展臂.pdf
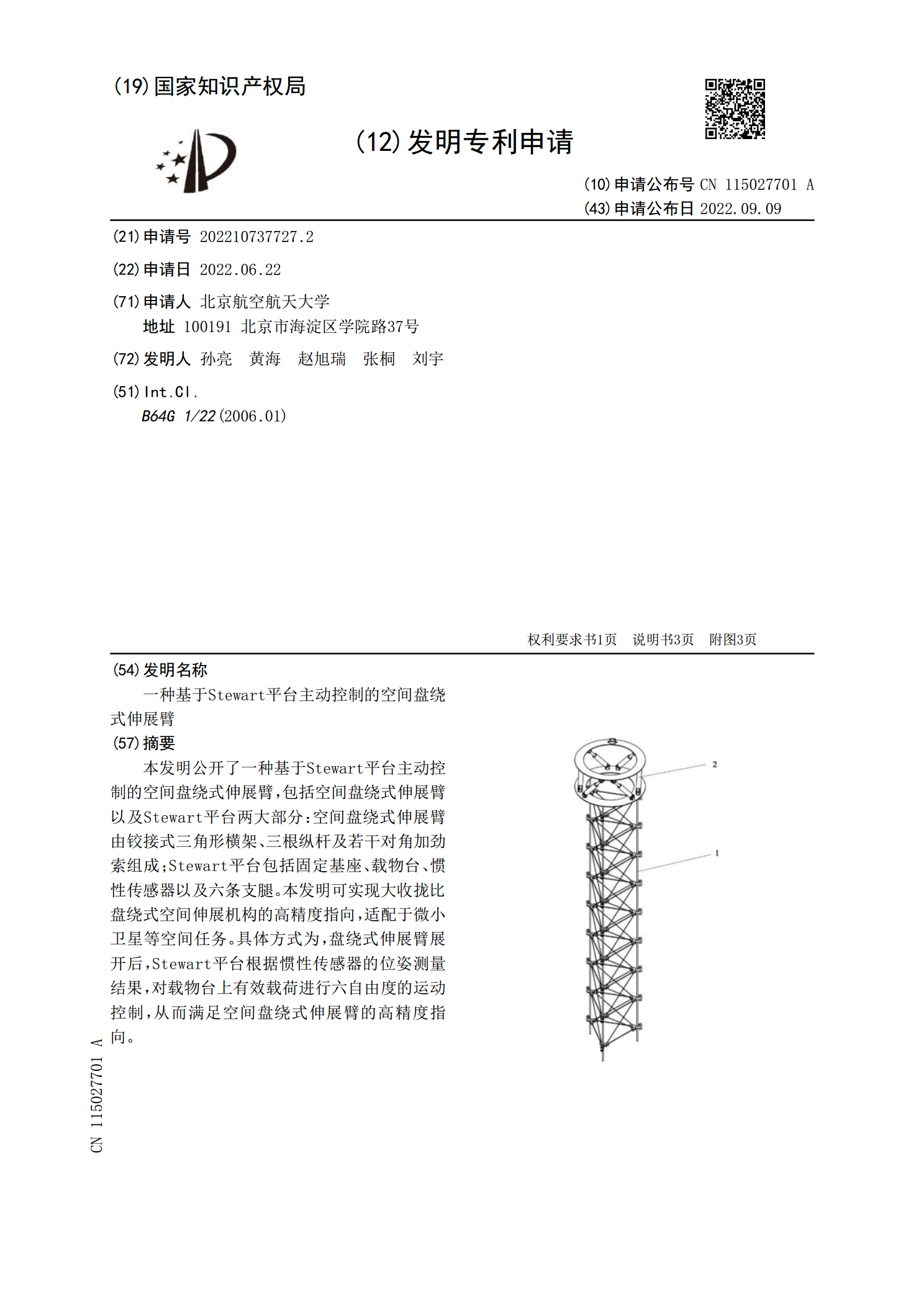
本发明公开了一种基于Stewart平台主动控制的空间盘绕式伸展臂,包括空间盘绕式伸展臂以及Stewart平台两大部分:空间盘绕式伸展臂由铰接式三角形横架、三根纵杆及若干对角加劲索组成;Stewart平台包括固定基座、载物台、惯性传感器以及六条支腿。本发明可实现大收拢比盘绕式空间伸展机构的高精度指向,适配于微小卫星等空间任务。具体方式为,盘绕式伸展臂展开后,Stewart平台根据惯性传感器的位姿测量结果,对载物台上有效载荷进行六自由度的运动控制,从而满足空间盘绕式伸展臂的高精度指向。

一种组合驱动式高收纳比套筒伸展臂及其伸展方法.pdf
本发明公开了一种组合驱动式高收纳比套筒伸展臂,驱动机构用于驱动i+1级套筒相对于i级套筒的伸展;绳索驱动系统用于在n级套筒相对于n‑1级套筒伸展的同时,驱动展开肋组件相对于n级套筒的伸展;锁紧机构负责各级套筒和展开肋伸展到位后的锁紧;展开肋解锁机构与展开肋锁定时,展开肋为收拢状态,展开肋解锁机构与展开肋解锁时,展开肋为展开状态。本发明还公开了一种组合驱动式高收纳比套筒伸展臂的伸展方法,包括驱动机构驱动n级套筒相对于n‑1级套筒伸展,同时绳索驱动系统驱动展开肋组件相对于n级套筒的伸展;直至2级套筒相对于1级
一种折叠伸展机构.pdf
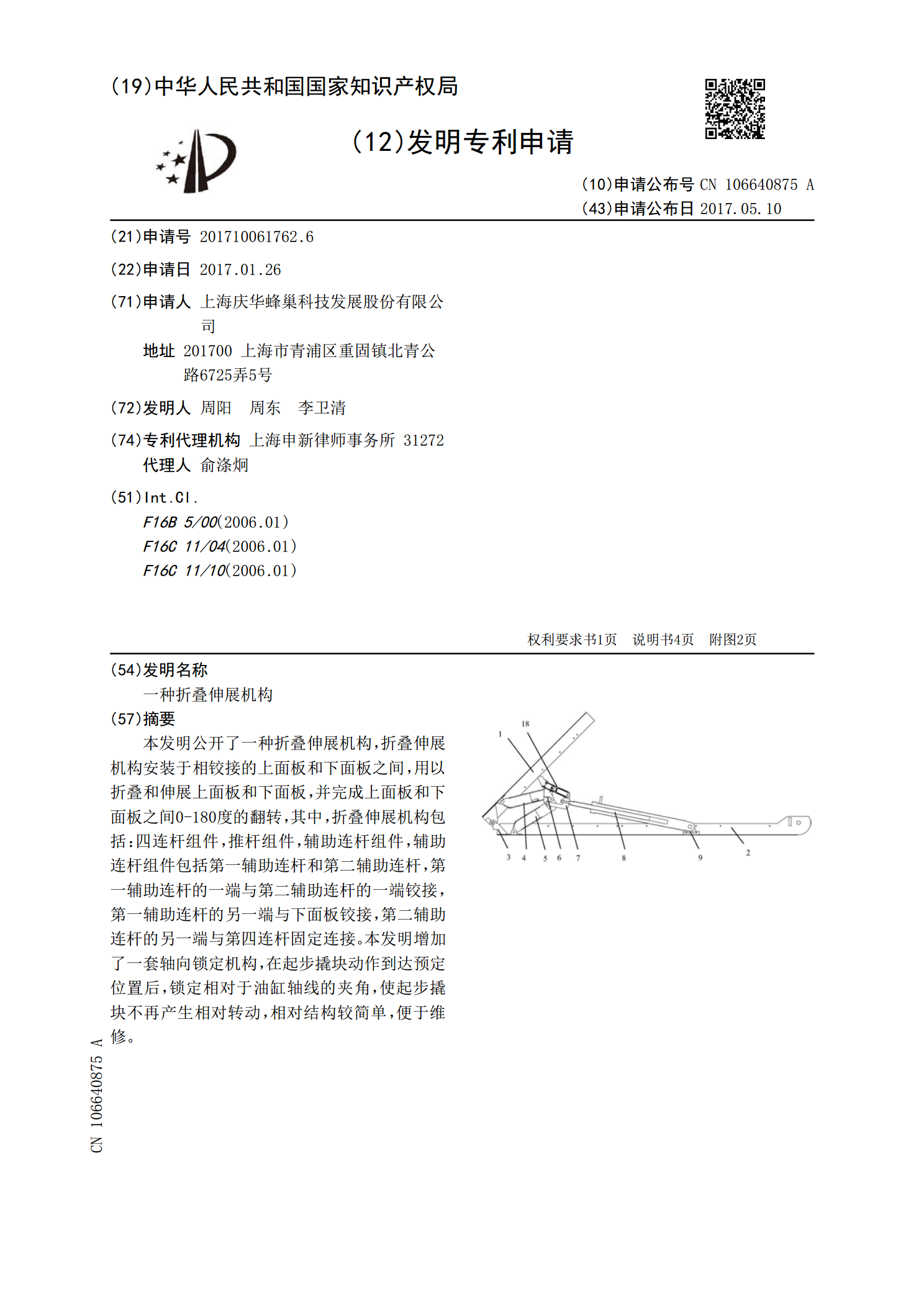
本发明公开了一种折叠伸展机构,折叠伸展机构安装于相铰接的上面板和下面板之间,用以折叠和伸展上面板和下面板,并完成上面板和下面板之间0‑180度的翻转,其中,折叠伸展机构包括:四连杆组件,推杆组件,辅助连杆组件,辅助连杆组件包括第一辅助连杆和第二辅助连杆,第一辅助连杆的一端与第二辅助连杆的一端铰接,第一辅助连杆的另一端与下面板铰接,第二辅助连杆的另一端与第四连杆固定连接。本发明增加了一套轴向锁定机构,在起步撬块动作到达预定位置后,锁定相对于油缸轴线的夹角,使起步撬块不再产生相对转动,相对结构较简单,便于维修