
一种基于Stewart平台主动控制的空间盘绕式伸展臂.pdf

灵慧****89


1/8
2/8
3/8
4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于Stewart平台主动控制的空间盘绕式伸展臂.pdf
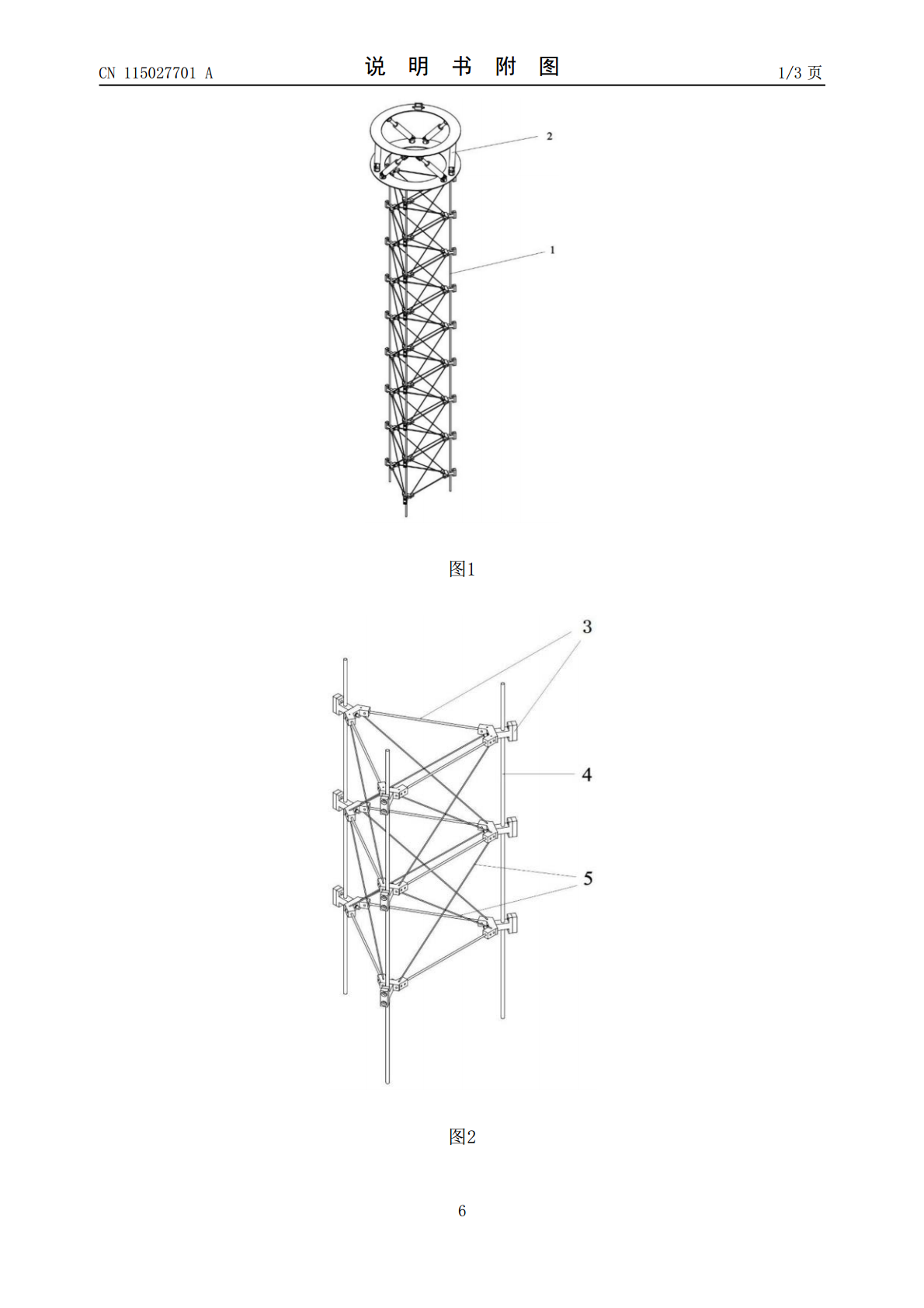
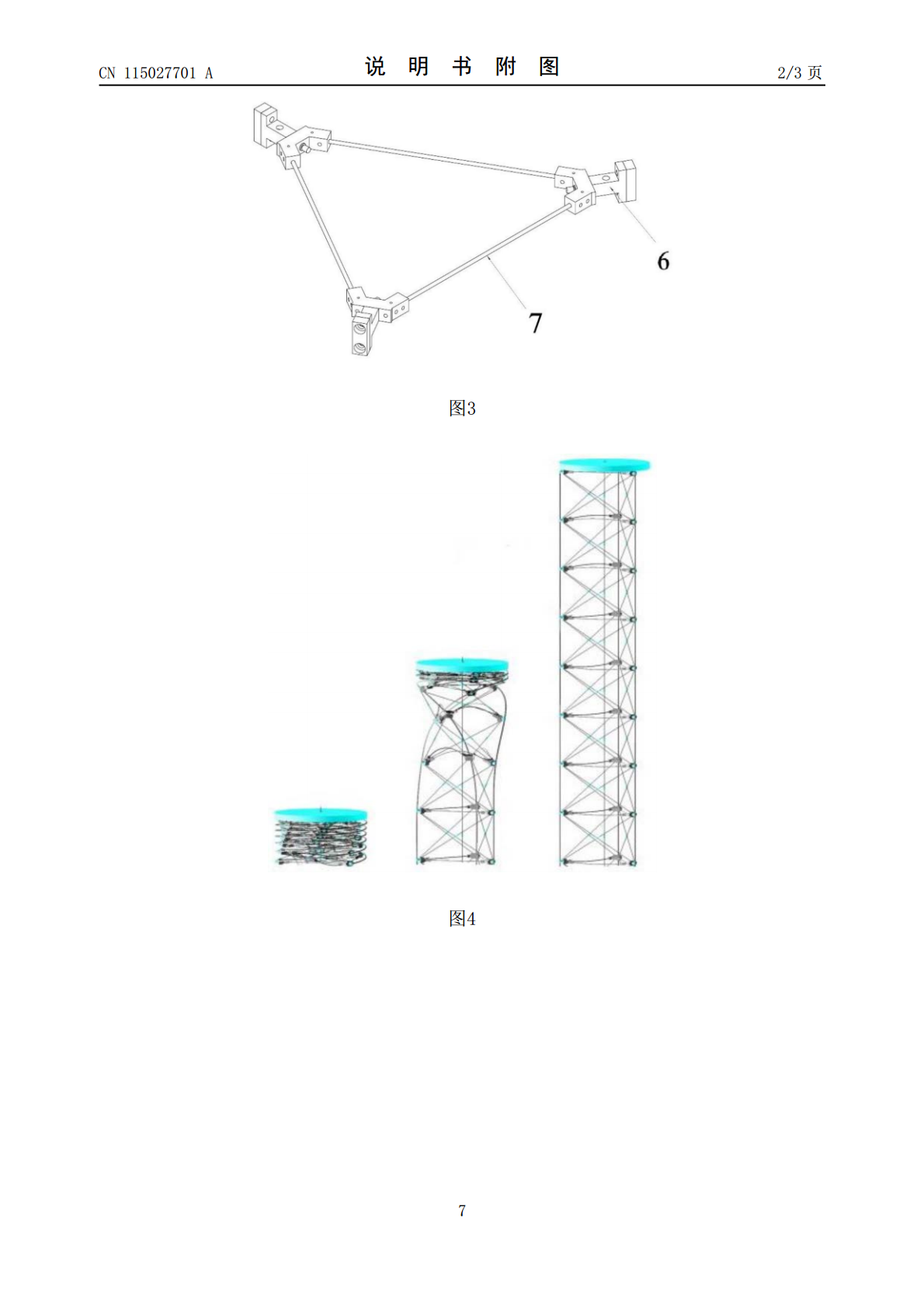
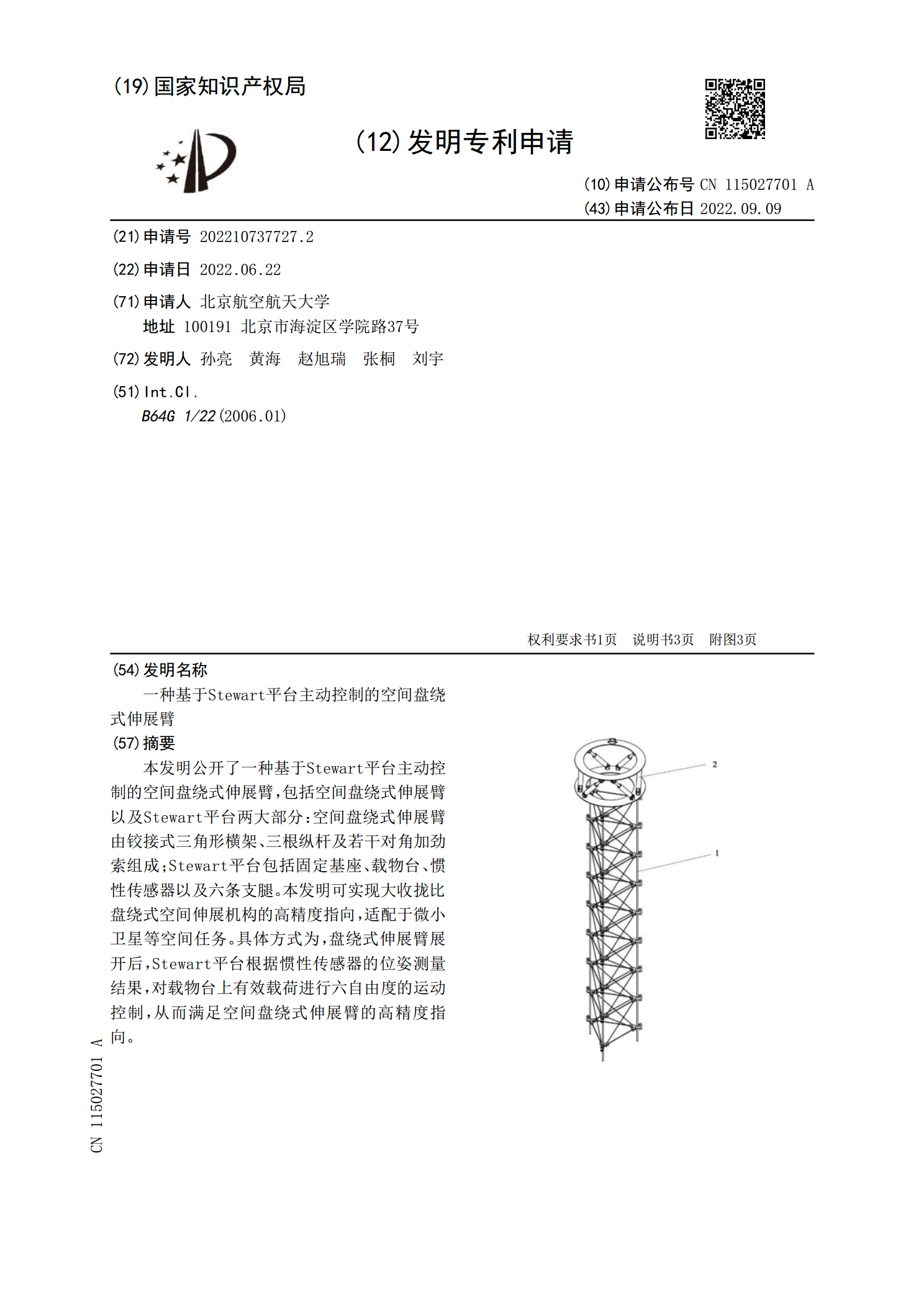
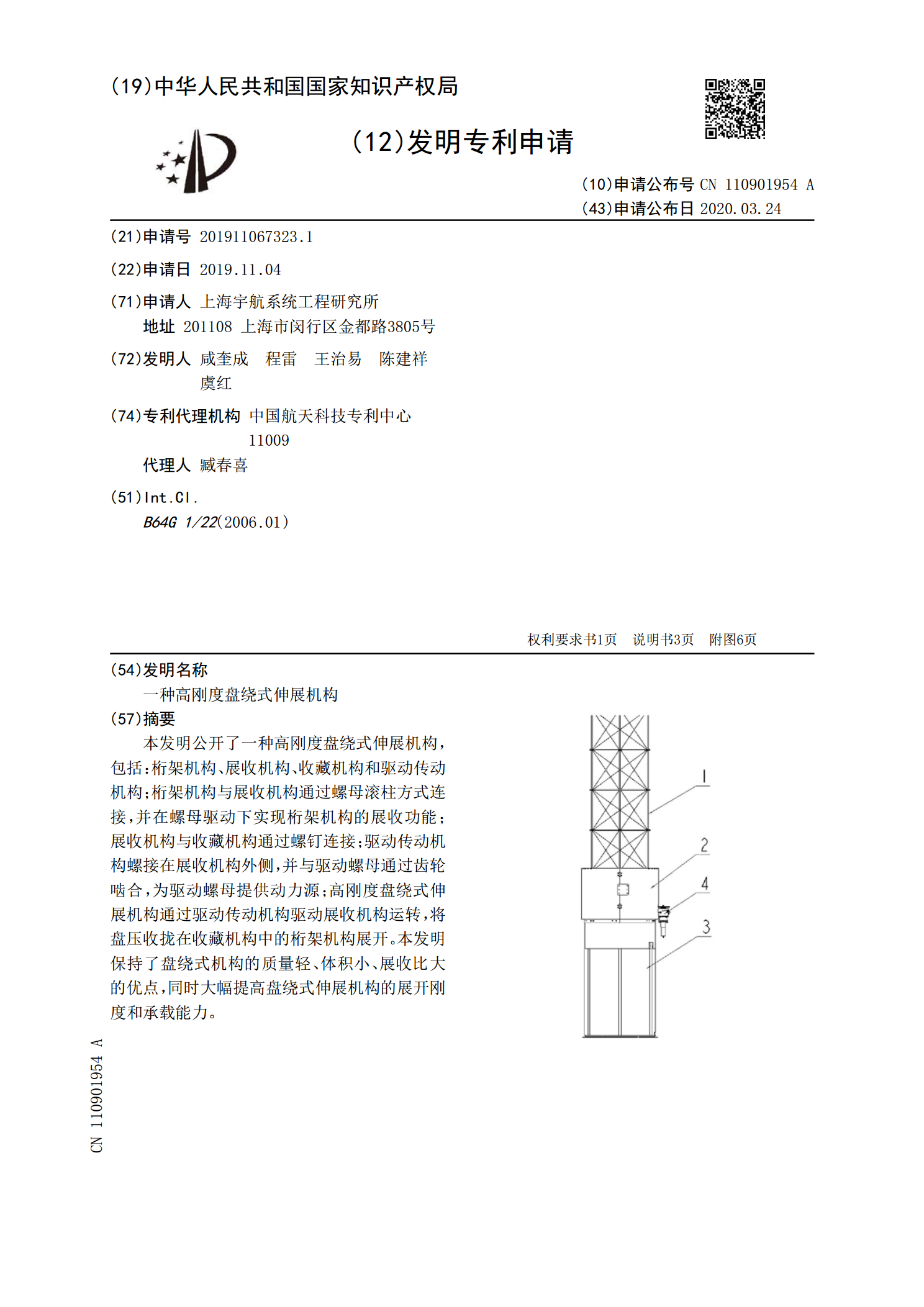
本发明公开了一种基于Stewart平台主动控制的空间盘绕式伸展臂,包括空间盘绕式伸展臂以及Stewart平台两大部分:空间盘绕式伸展臂由铰接式三角形横架、三根纵杆及若干对角加劲索组成;Stewart平台包括固定基座、载物台、惯性传感器以及六条支腿。本发明可实现大收拢比盘绕式空间伸展机构的高精度指向,适配于微小卫星等空间任务。具体方式为,盘绕式伸展臂展开后,Stewart平台根据惯性传感器的位姿测量结果,对载物台上有效载荷进行六自由度的运动控制,从而满足空间盘绕式伸展臂的高精度指向。

盘绕式伸展臂初步设计与分析.docx
盘绕式伸展臂初步设计与分析标题:盘绕式伸展臂初步设计与分析摘要:盘绕式伸展臂是一种常见的机械装置,广泛应用于各个领域,如工业生产线、航天飞行器和医疗设备等。本文以盘绕式伸展臂的初步设计与分析为题,介绍了盘绕式伸展臂的工作原理、设计方法与分析过程,以及其在工程实践中的应用场景。通过对盘绕式伸展臂的设计与分析,提高其稳定性和可靠性,满足不同领域对机械臂的需求。关键词:盘绕式伸展臂、初步设计、工作原理、分析、应用场景一、引言盘绕式伸展臂是一种具有多个关节的机械臂,其结构特点在于可伸缩和可旋转。盘绕式伸展臂广泛应
一种高刚度盘绕式伸展机构.pdf
本发明公开了一种高刚度盘绕式伸展机构,包括:桁架机构、展收机构、收藏机构和驱动传动机构;桁架机构与展收机构通过螺母滚柱方式连接,并在螺母驱动下实现桁架机构的展收功能;展收机构与收藏机构通过螺钉连接;驱动传动机构螺接在展收机构外侧,并与驱动螺母通过齿轮啮合,为驱动螺母提供动力源;高刚度盘绕式伸展机构通过驱动传动机构驱动展收机构运转,将盘压收拢在收藏机构中的桁架机构展开。本发明保持了盘绕式机构的质量轻、体积小、展收比大的优点,同时大幅提高盘绕式伸展机构的展开刚度和承载能力。

剪叉式空间伸展臂机构.pdf
本发明公开了一种剪叉式空间伸展臂机构。本发明包括结构相同的第一、二剪叉单元部件、驱动部件、顶部支撑部件、结构均相同的四个第一纵向支撑部件和四个第二纵向支撑部件;顶部支撑部件依次经第二剪叉单元部件、第一剪叉单元部件装在驱动部件上,第一、二纵向支撑部件分别装在第一、二剪叉单元部件四侧。本发明采用双凸轮组合设计,通过阶梯形圆柱凸轮上的双凸轮廓线,实现空间伸展臂纵、横向刚性锁定,保证展开后伸展臂的稳定状态为刚性桁架结构。本发明折展比大、结构紧凑、对称性好,通过单一动力源输入同时实现伸展臂的折展与锁解功能,确保了折
一种桁架式空间天线伸展臂.pdf
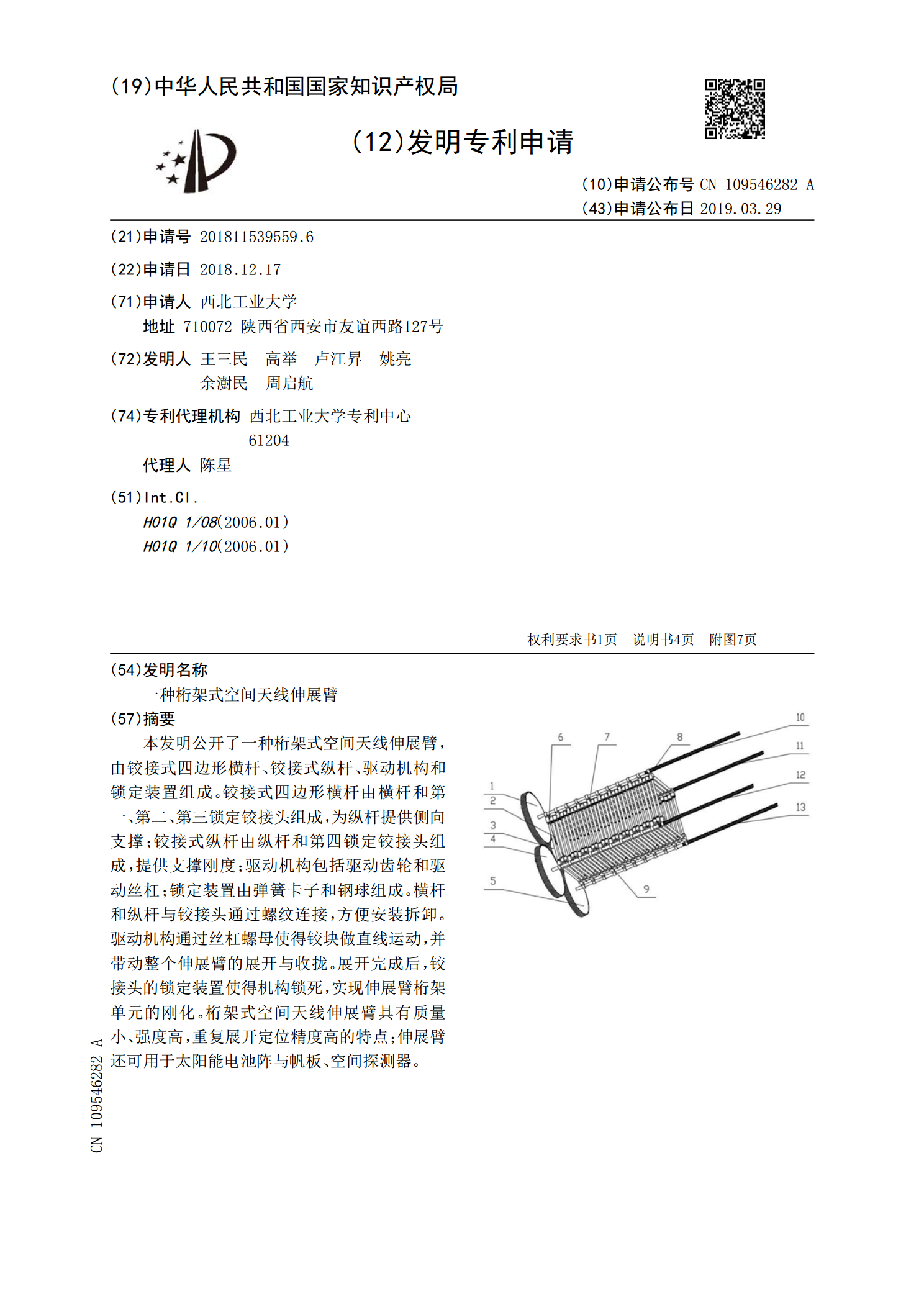
本发明公开了一种桁架式空间天线伸展臂,由铰接式四边形横杆、铰接式纵杆、驱动机构和锁定装置组成。铰接式四边形横杆由横杆和第一、第二、第三锁定铰接头组成,为纵杆提供侧向支撑;铰接式纵杆由纵杆和第四锁定铰接头组成,提供支撑刚度;驱动机构包括驱动齿轮和驱动丝杠;锁定装置由弹簧卡子和钢球组成。横杆和纵杆与铰接头通过螺纹连接,方便安装拆卸。驱动机构通过丝杠螺母使得铰块做直线运动,并带动整个伸展臂的展开与收拢。展开完成后,铰接头的锁定装置使得机构锁死,实现伸展臂桁架单元的刚化。桁架式空间天线伸展臂具有质量小、强度高,重