
一种用于鞋面的机器人划线方法及应用其的装置.pdf

小忆****ng

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于鞋面的机器人划线方法及应用其的装置.pdf
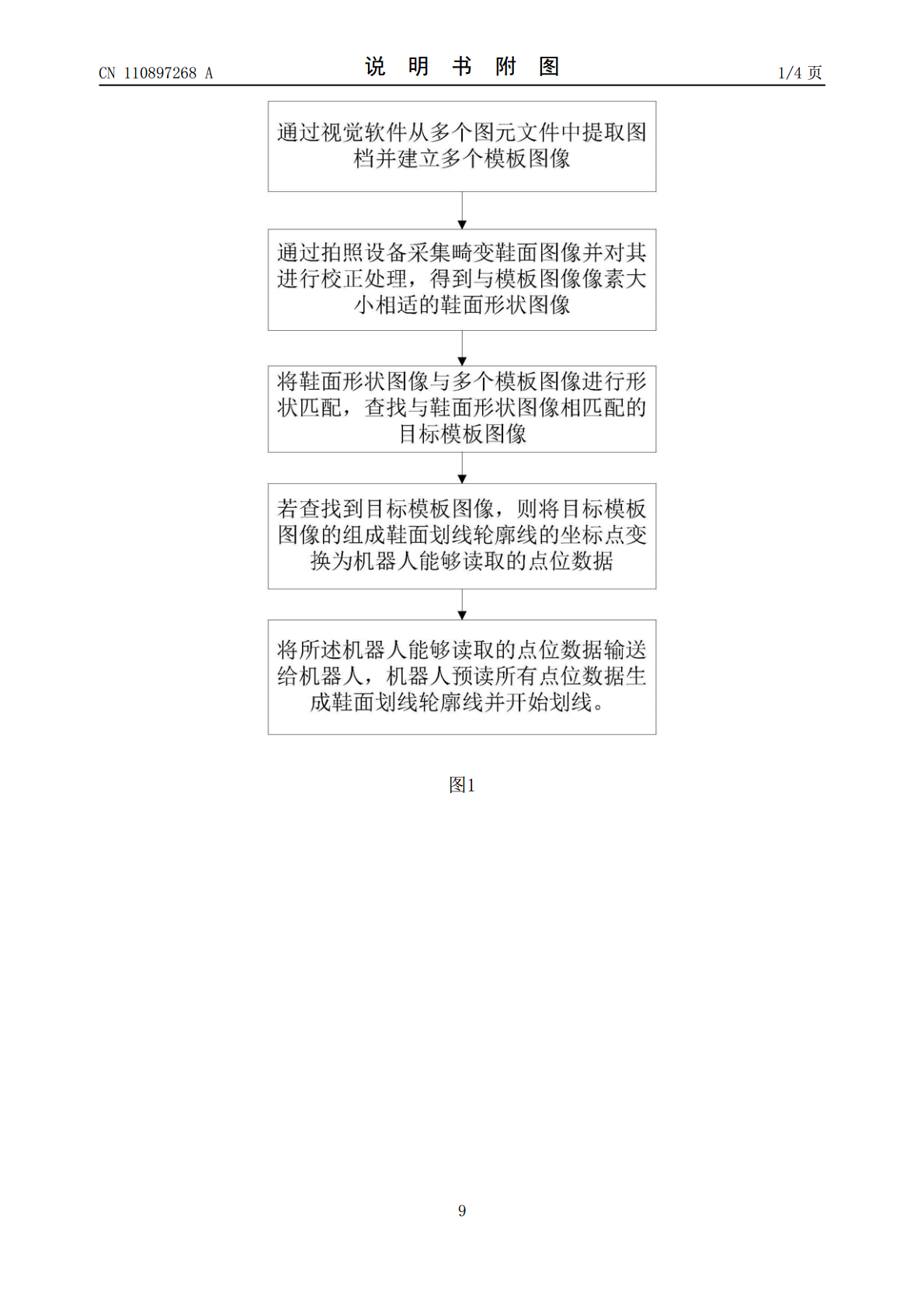
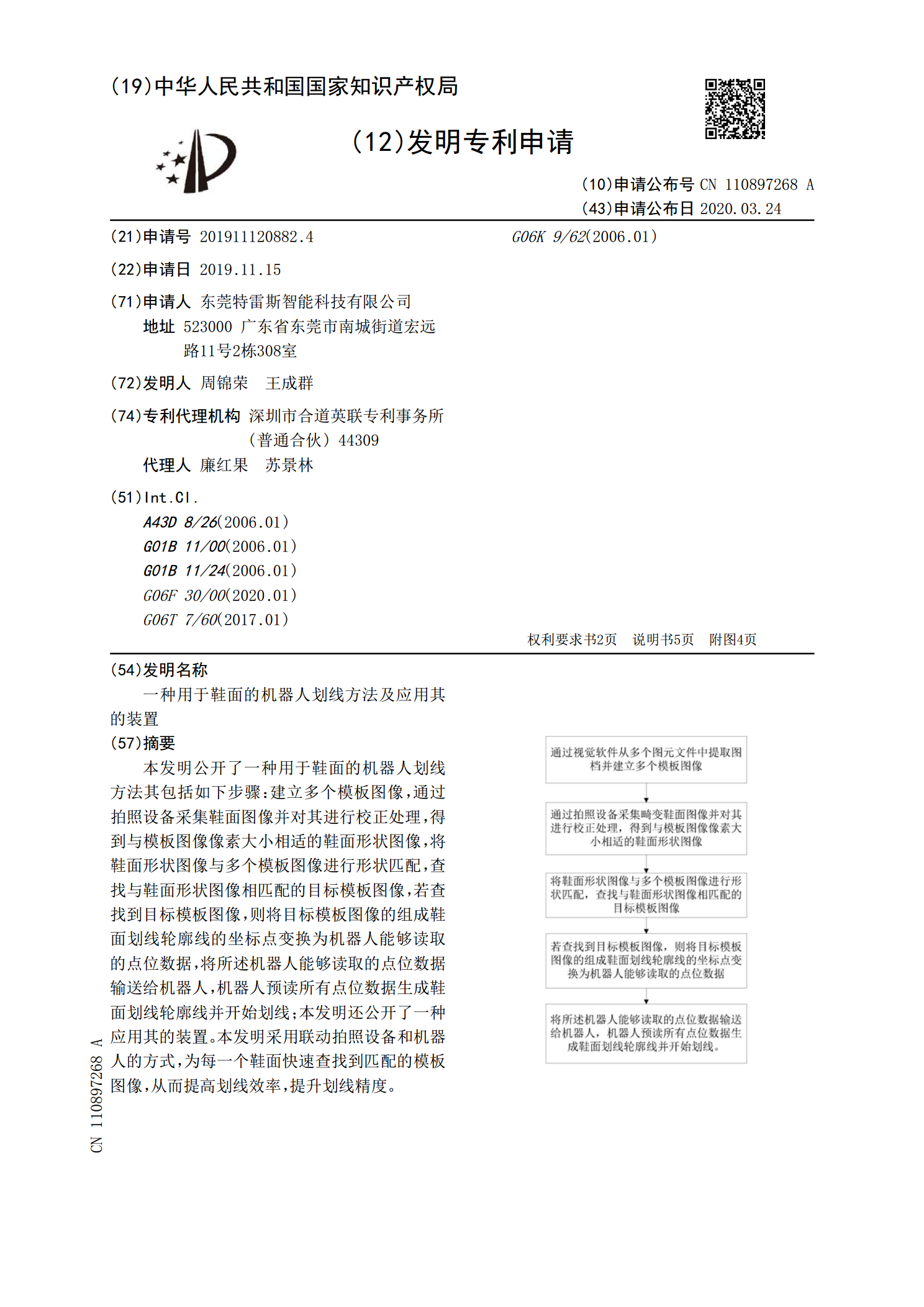
本发明公开了一种用于鞋面的机器人划线方法其包括如下步骤:建立多个模板图像,通过拍照设备采集鞋面图像并对其进行校正处理,得到与模板图像像素大小相适的鞋面形状图像,将鞋面形状图像与多个模板图像进行形状匹配,查找与鞋面形状图像相匹配的目标模板图像,若查找到目标模板图像,则将目标模板图像的组成鞋面划线轮廓线的坐标点变换为机器人能够读取的点位数据,将所述机器人能够读取的点位数据输送给机器人,机器人预读所有点位数据生成鞋面划线轮廓线并开始划线;本发明还公开了一种应用其的装置。本发明采用联动拍照设备和机器人的方式,为每
用于固定木制样条划线的装置以及划线方法.pdf
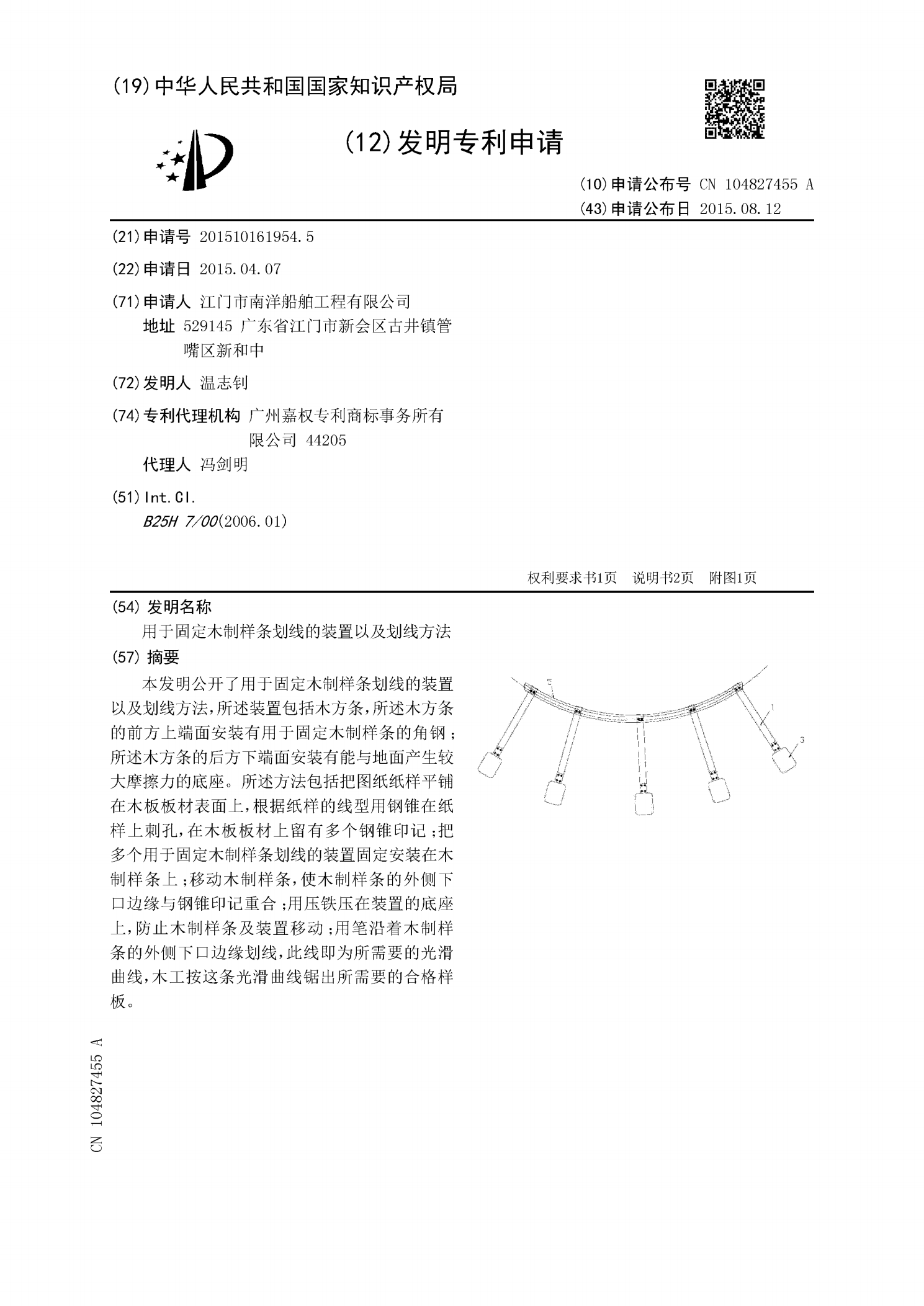
本发明公开了用于固定木制样条划线的装置以及划线方法,所述装置包括木方条,所述木方条的前方上端面安装有用于固定木制样条的角钢;所述木方条的后方下端面安装有能与地面产生较大摩擦力的底座。所述方法包括把图纸纸样平铺在木板板材表面上,根据纸样的线型用钢锥在纸样上刺孔,在木板板材上留有多个钢锥印记;把多个用于固定木制样条划线的装置固定安装在木制样条上;移动木制样条,使木制样条的外侧下口边缘与钢锥印记重合;用压铁压在装置的底座上,防止木制样条及装置移动;用笔沿着木制样条的外侧下口边缘划线,此线即为所需要的光滑曲线,木

用于玻璃面板的划线装置及其划线方法.pdf
本发明公开了一种用于玻璃面板的划线装置及其划线方法。用于玻璃面板的划线装置包括:划线头;划线轮保持件,其安装在划线头中;以及划线轮,其可转动地安装到划线轮保持件的下端部。在划线轮保持件中形成有销孔。销插入经过划线轮的转动轴线。销的相对两端部插入划线轮保持件的销孔内。销的相对两端部的外周表面成曲面状,使得销的相对两端部的横截面直径随着朝销的末端趋近而变小。划线轮在执行划线操作期间相对于玻璃面板的表面的垂直线倾斜。
一种轮毂表面的划线装置.pdf
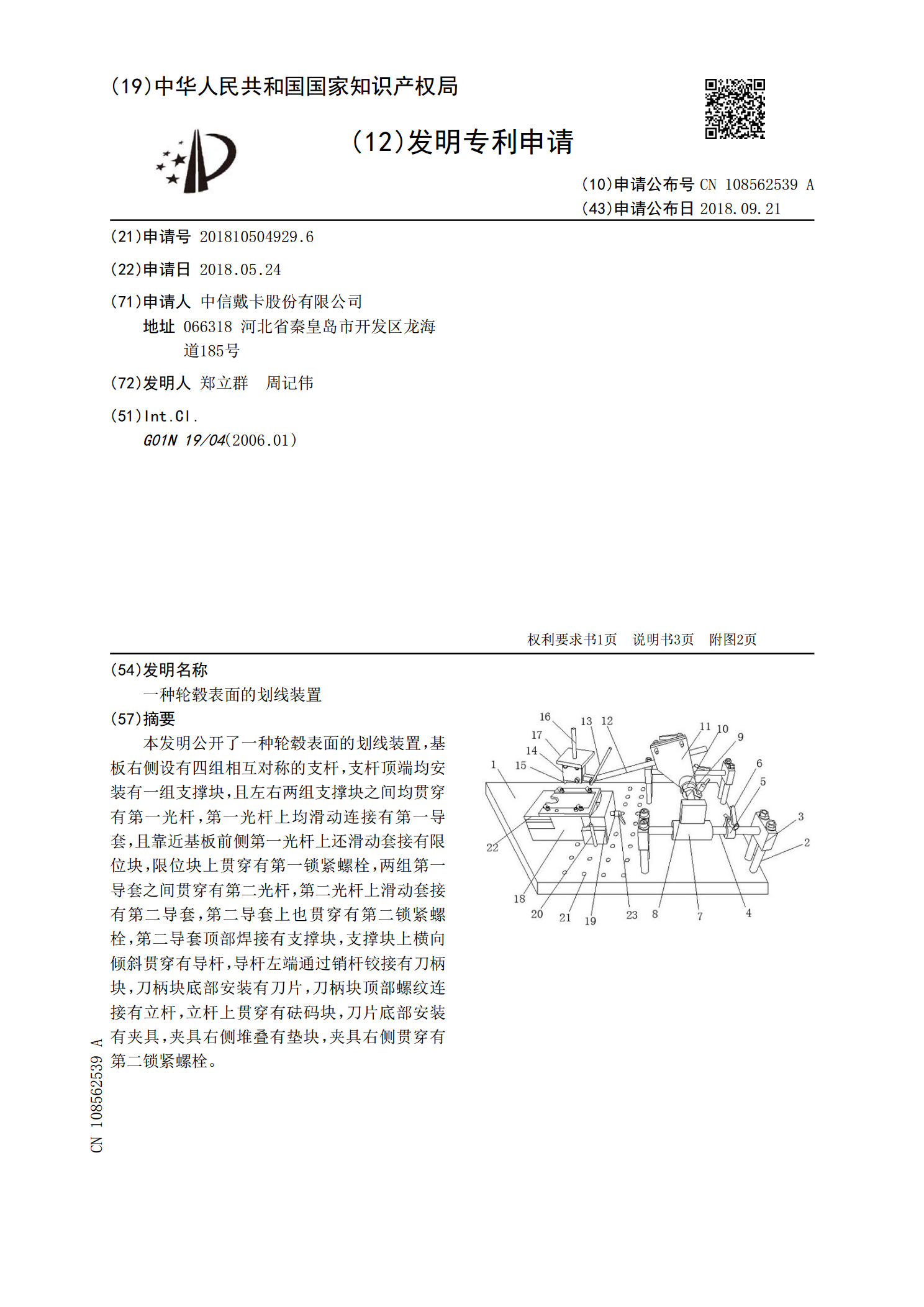
本发明公开了一种轮毂表面的划线装置,基板右侧设有四组相互对称的支杆,支杆顶端均安装有一组支撑块,且左右两组支撑块之间均贯穿有第一光杆,第一光杆上均滑动连接有第一导套,且靠近基板前侧第一光杆上还滑动套接有限位块,限位块上贯穿有第一锁紧螺栓,两组第一导套之间贯穿有第二光杆,第二光杆上滑动套接有第二导套,第二导套上也贯穿有第二锁紧螺栓,第二导套顶部焊接有支撑块,支撑块上横向倾斜贯穿有导杆,导杆左端通过销杆铰接有刀柄块,刀柄块底部安装有刀片,刀柄块顶部螺纹连接有立杆,立杆上贯穿有砝码块,刀片底部安装有夹具,夹具右

划线轮、其制造方法及划线方法.pdf
本发明涉及一种划线轮、其制造方法及划线方法。使划线轮使用寿命延长,并且划线后使断开脆性材料基板时的基板的端面强度增强。本发明是使用使圆板周围侧面的中央部分为最大直径的划线轮基材,在其侧面利用CVD法形成金刚石膜。接着,研磨侧面的中央部分,以使包含由棱线所构成的圆的面与划线轮的中心轴垂直。由此,可使棱线部分的粗糙度变得精细。在使用该划线轮,将脆性材料基板划线断开时,断开的基材的端面精度提高,从而可提高端面强度。而且,即便进一步进行划线,棱线部分磨损也较少,故可使划线轮使用寿命延长。