
一种基于车载摄像头的路侧停车位感知方法及系统.pdf

玄静****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于车载摄像头的路侧停车位感知方法及系统.pdf
本发明公开了一种基于车载摄像头的路侧停车位感知方法及系统,包括以下步骤,采集模块采集后车图像并输入识别模块,所述识别模块基于深度学习的方法对后车图像进行识别,输出车轮的像素坐标并传输给计算机视觉模块;所述计算机视觉模块将所述像素坐标转换成世界坐标,并画出参考线和参考车框;将所述参考车框输入至检测模块,通过粗检和细检判断是否能够停车以及标出停车位框。本发明的有益效果:基于车载摄像头,采用深度学习和计算机视觉识别路侧停车位,能够精确检测空闲车位中的障碍物,特别是低矮或较小的障碍物,增加了安全性。
一种基于车路协同的路侧感知融合系统及优化方法.pdf
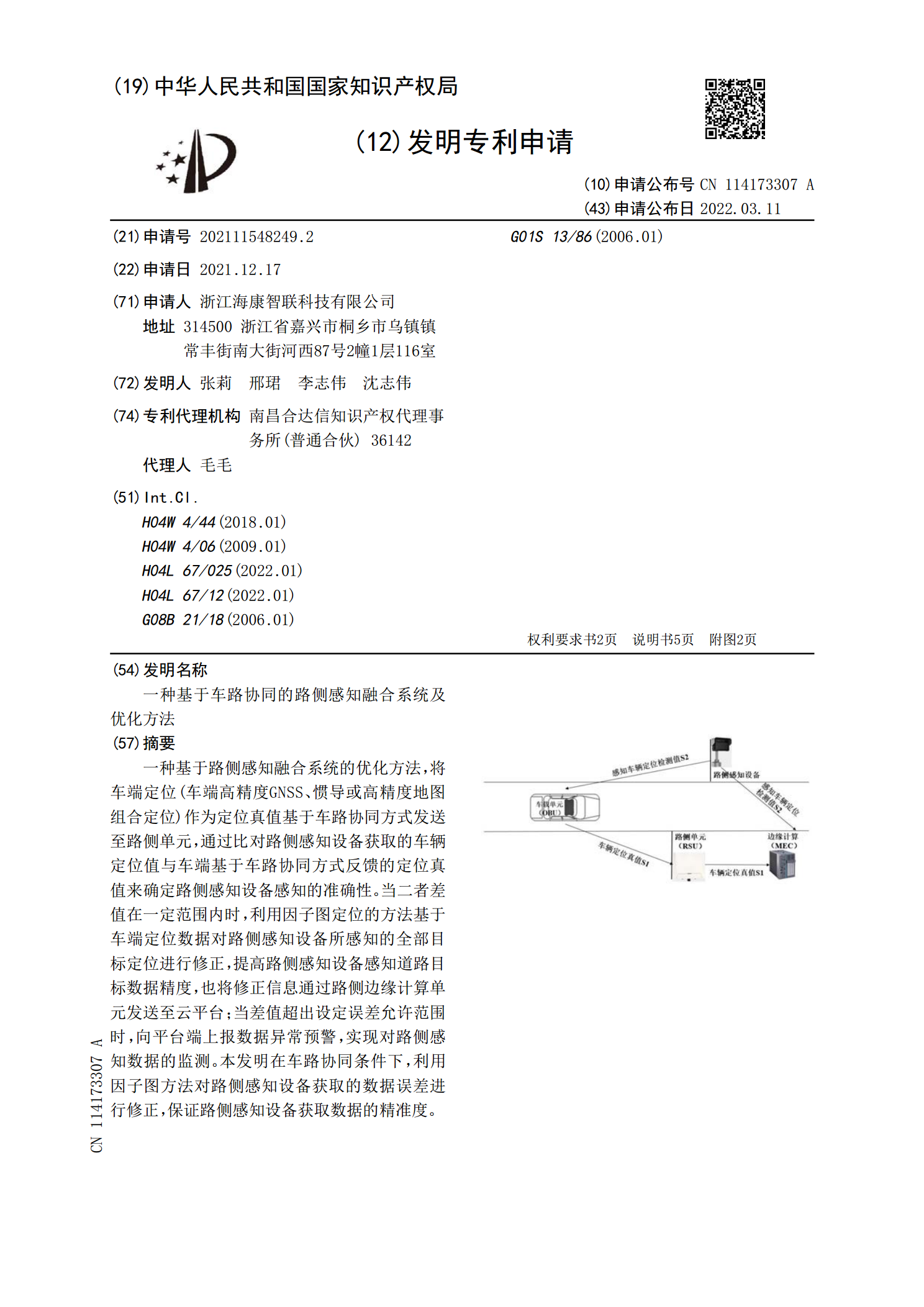
一种基于路侧感知融合系统的优化方法,将车端定位(车端高精度GNSS、惯导或高精度地图组合定位)作为定位真值基于车路协同方式发送至路侧单元,通过比对路侧感知设备获取的车辆定位值与车端基于车路协同方式反馈的定位真值来确定路侧感知设备感知的准确性。当二者差值在一定范围内时,利用因子图定位的方法基于车端定位数据对路侧感知设备所感知的全部目标定位进行修正,提高路侧感知设备感知道路目标数据精度,也将修正信息通过路侧边缘计算单元发送至云平台;当差值超出设定误差允许范围时,向平台端上报数据异常预警,实现对路侧感知数据的监

一种基于摄像头的智能路侧系统.pdf
本发明涉及一种基于摄像头的智能路侧系统,包括处理器和存储器,所述存储器存储有计算机程序,所述处理器调用所述计算机程序执行的操作包括:对摄像头进行标定;获取摄像头的视频数据,对所述视频数据进行目标检测;基于所述目标检测结果与已存储的存活轨迹进行匹配;根据匹配结果向外无线广播目标定位追踪结果,并进行日志存储;根据所述目标定位追踪结果构建并可视化局部地图数据;实时自动上传所述目标定位追踪结果和局部地图数据。与现有技术相比,本发明既可为交通法规执行提供执法依据,减少执法人员工作量,又可以协助智能车辆进行感知,减少

一种路侧设备、车载设备以及自动驾驶感知方法及系统.pdf
本发明涉及自动驾驶技术领域,尤其涉及一种路侧设备、车载设备以及自动驾驶感知方法及系统,路侧设备,用于探测目标区域,获取目标区域中目标的探测数据,并根据所述目标区域中目标的探测数据,确定所述目标区域中目标的运动信息和状态信息,以及将所述目标的运动信息和状态信息发送给车载设备;车载设备,用于接收所述路侧设备发送的所述目标的运动信息和状态信息。本发明技术方案能够借助路侧设备为车辆提供盲区的环境信息,从而使得能够实时、准确获取到车辆盲区的环境信息,提高车辆控制的准确性,解决了例如卡车倒车、装卸货而无法获知盲区环境

一种路侧设备、车载设备以及自动驾驶感知方法及系统.pdf
本发明涉及自动驾驶技术领域,尤其涉及一种路侧设备、车载设备以及自动驾驶感知方法及系统,路侧设备,用于探测目标区域,获取目标区域中目标的探测数据,并根据所述目标区域中目标的探测数据,确定所述目标区域中目标的运动信息和状态信息,以及将所述目标的运动信息和状态信息发送给车载设备;车载设备,用于接收所述路侧设备发送的所述目标的运动信息和状态信息。本发明技术方案能够借助路侧设备为车辆提供盲区的环境信息,从而使得能够实时、准确获取到车辆盲区的环境信息,提高车辆控制的准确性,解决了例如卡车倒车、装卸货而无法获知盲区环境