
一种路侧设备、车载设备以及自动驾驶感知方法及系统.pdf

Ke****67


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种路侧设备、车载设备以及自动驾驶感知方法及系统.pdf
本发明涉及自动驾驶技术领域,尤其涉及一种路侧设备、车载设备以及自动驾驶感知方法及系统,路侧设备,用于探测目标区域,获取目标区域中目标的探测数据,并根据所述目标区域中目标的探测数据,确定所述目标区域中目标的运动信息和状态信息,以及将所述目标的运动信息和状态信息发送给车载设备;车载设备,用于接收所述路侧设备发送的所述目标的运动信息和状态信息。本发明技术方案能够借助路侧设备为车辆提供盲区的环境信息,从而使得能够实时、准确获取到车辆盲区的环境信息,提高车辆控制的准确性,解决了例如卡车倒车、装卸货而无法获知盲区环境

一种路侧设备、车载设备以及自动驾驶感知方法及系统.pdf
本发明涉及自动驾驶技术领域,尤其涉及一种路侧设备、车载设备以及自动驾驶感知方法及系统,路侧设备,用于探测目标区域,获取目标区域中目标的探测数据,并根据所述目标区域中目标的探测数据,确定所述目标区域中目标的运动信息和状态信息,以及将所述目标的运动信息和状态信息发送给车载设备;车载设备,用于接收所述路侧设备发送的所述目标的运动信息和状态信息。本发明技术方案能够借助路侧设备为车辆提供盲区的环境信息,从而使得能够实时、准确获取到车辆盲区的环境信息,提高车辆控制的准确性,解决了例如卡车倒车、装卸货而无法获知盲区环境
支付方法、支付系统、路侧设备及车载设备.pdf
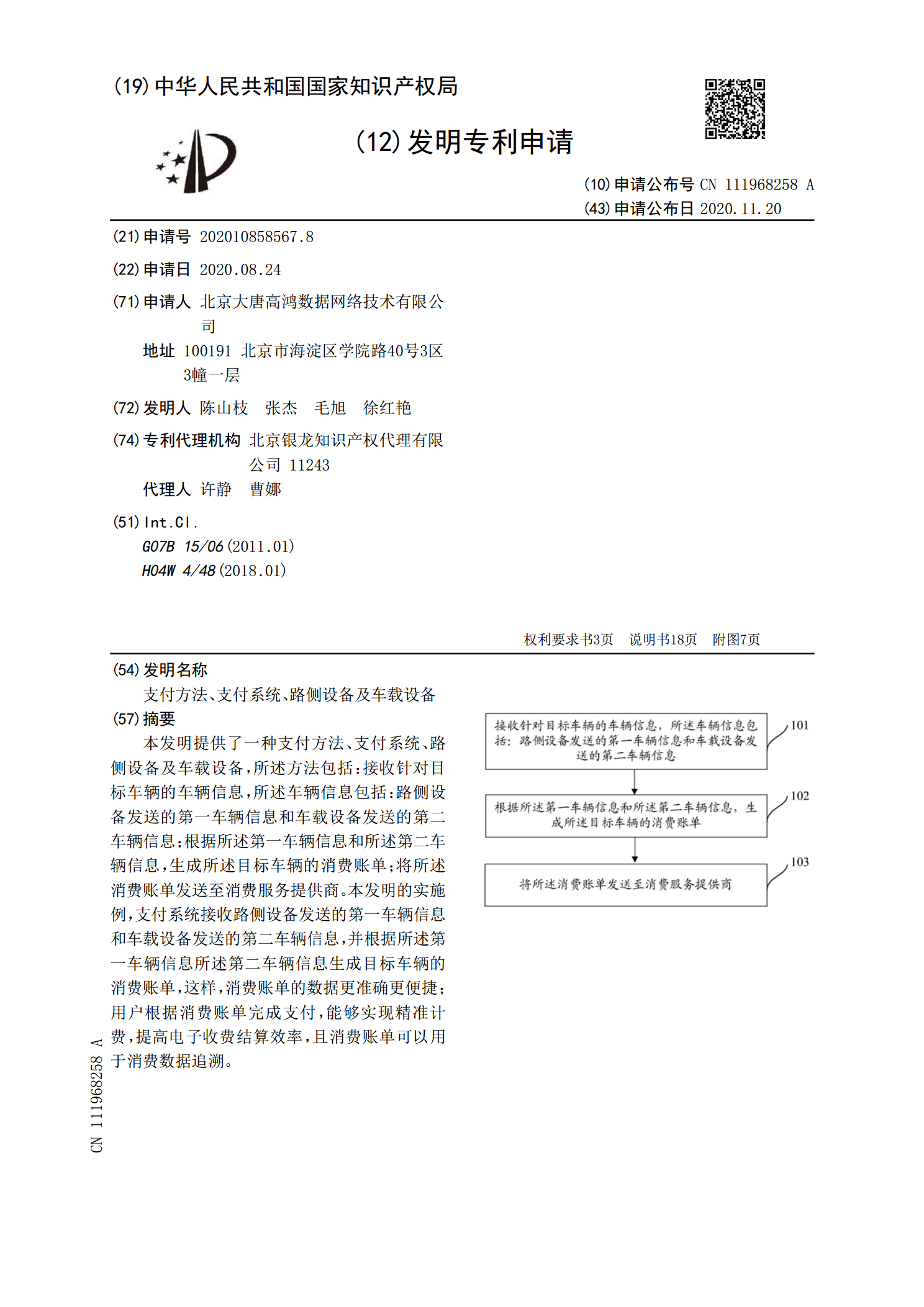
本发明提供了一种支付方法、支付系统、路侧设备及车载设备,所述方法包括:接收针对目标车辆的车辆信息,所述车辆信息包括:路侧设备发送的第一车辆信息和车载设备发送的第二车辆信息;根据所述第一车辆信息和所述第二车辆信息,生成所述目标车辆的消费账单;将所述消费账单发送至消费服务提供商。本发明的实施例,支付系统接收路侧设备发送的第一车辆信息和车载设备发送的第二车辆信息,并根据所述第一车辆信息所述第二车辆信息生成目标车辆的消费账单,这样,消费账单的数据更准确更便捷;用户根据消费账单完成支付,能够实现精准计费,提高电子收

路侧机、车载器、通信系统以及通信方法.pdf
路侧机具有:通信部,接收从车载器发送的数据,并转送给服务器;以及控制部,在数据向服务器的转送中,在从车载器接收到数据的上传再次开始请求的情况下,保留向服务器的上传再次开始请求的转送。

差分基站、路侧设备、车载定位设备以及差分定位方法.pdf
本发明提供一种差分基站、路侧设备、车载定位设备、差分定位系统和差分定位方法。其中,该差分定位系统包括:差分基站、路侧设备和车载定位设备,其中,差分基站用于生成定位修正数据并通过互联网发送给远程服务器,路侧设备用于从远程服务器接收定位修正数据,并将定位修正数据通过V2X通信发送给车载定位设备,车载定位设备用于获取初始定位数据,并根据从路侧设备接收到的定位修正数据对初始定位数据进行修正。本发明的差分定位系统和差分定位方法,通过将差分定位技术与V2X通信技术相结合,可以使车载单元快捷、稳定地获取定位精度较高的定