
一种基于齿轮连杆机构的仿生鱼尾.pdf

黛娥****ak


1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于齿轮连杆机构的仿生鱼尾.pdf
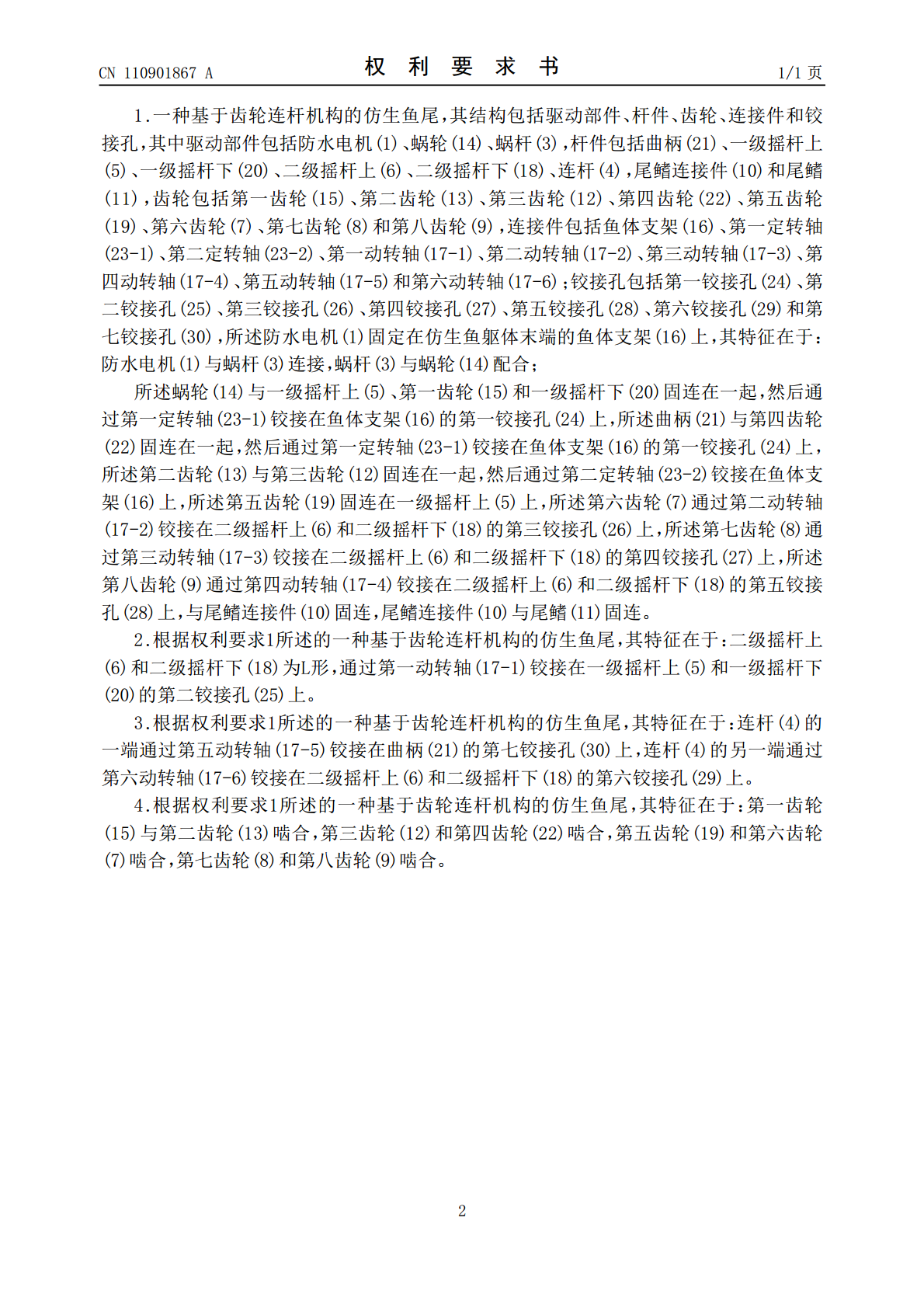
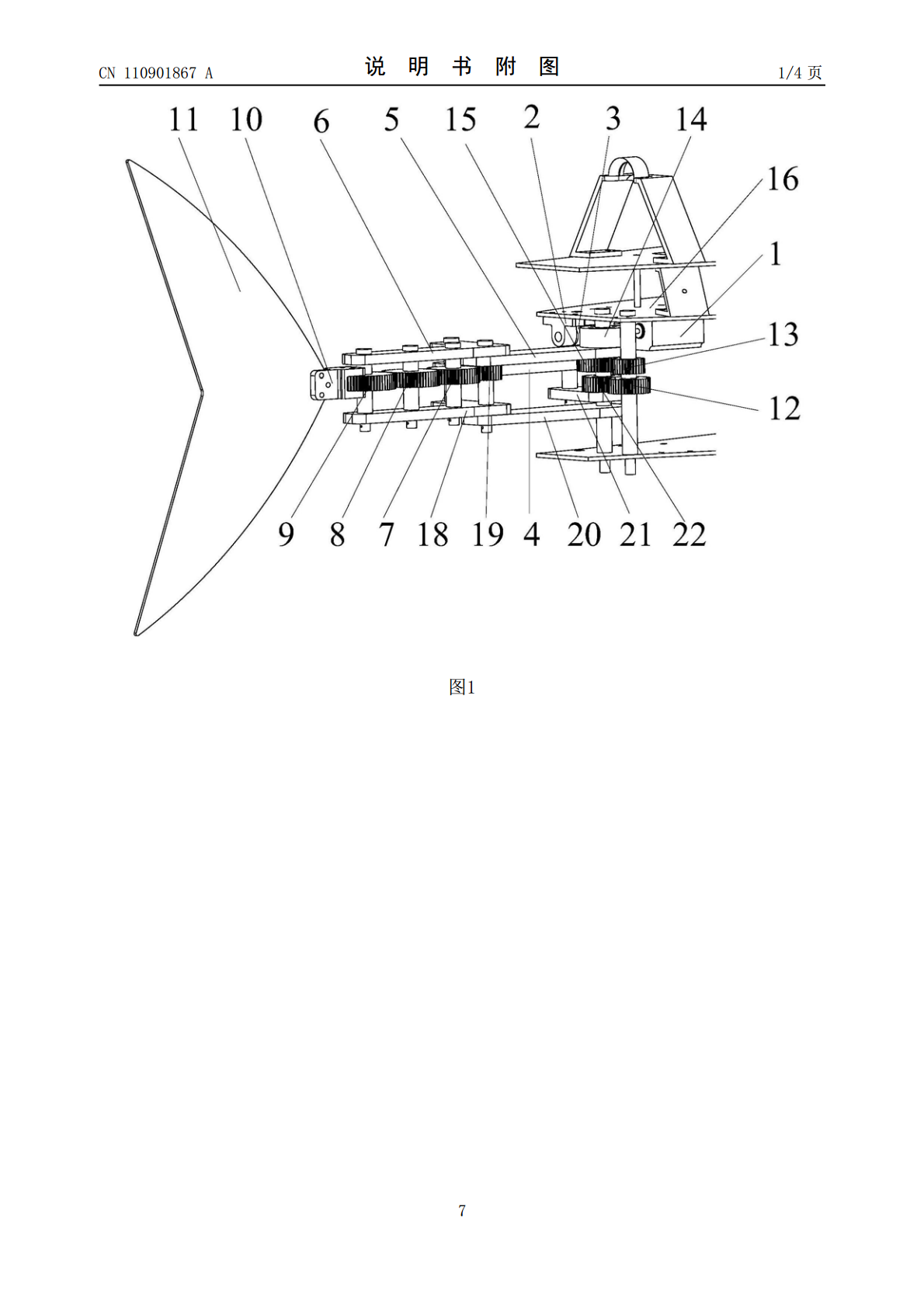
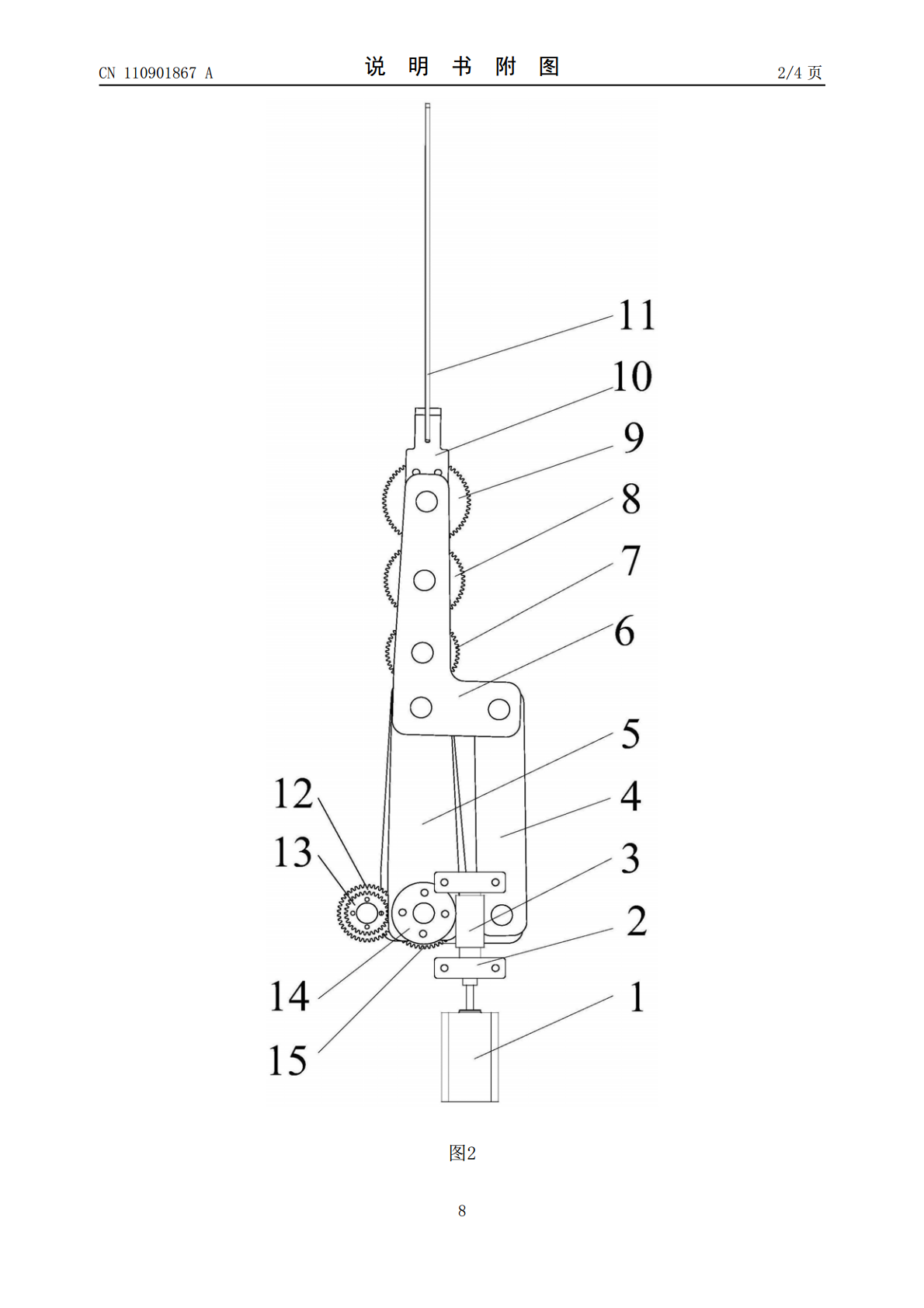
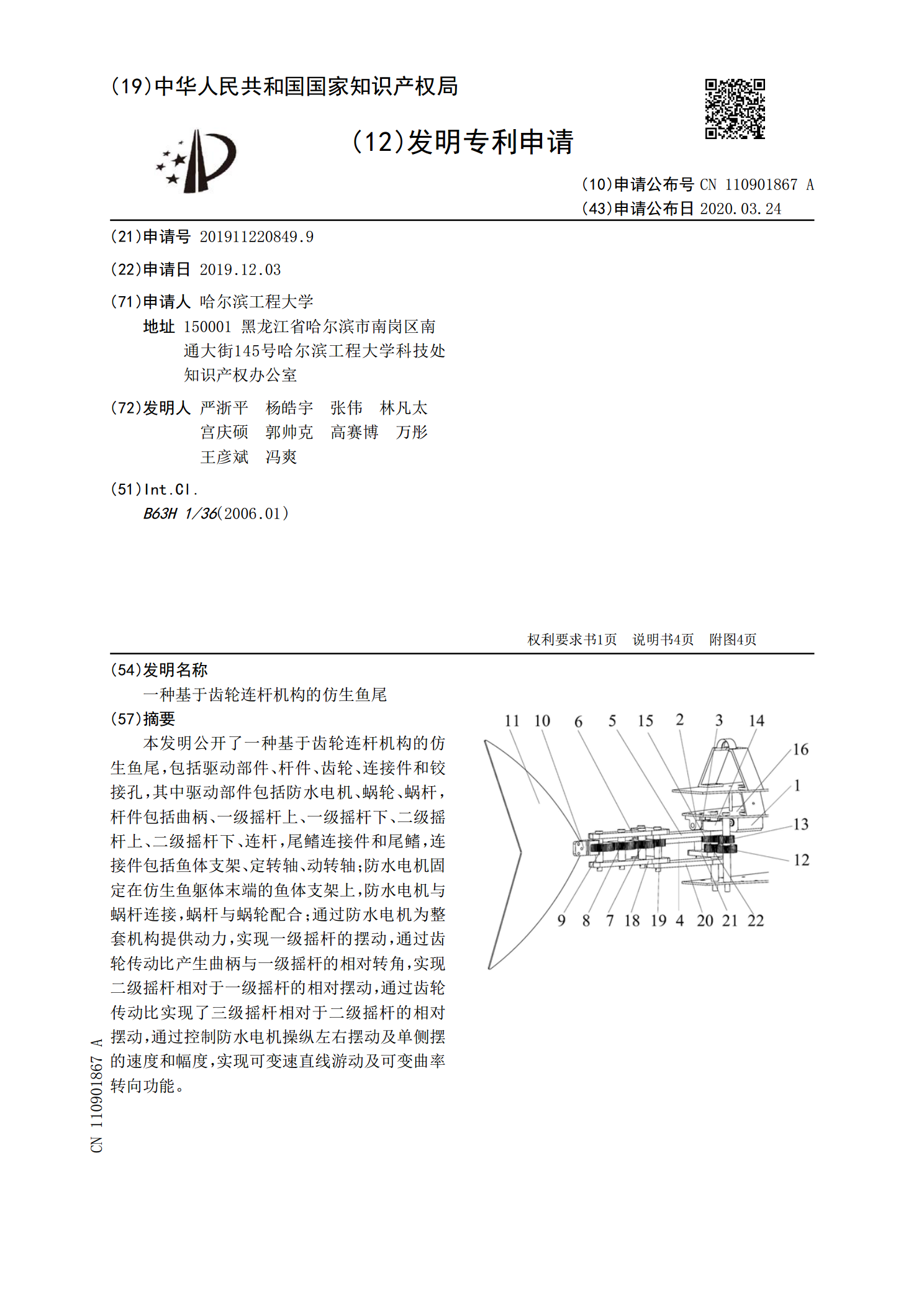
本发明公开了一种基于齿轮连杆机构的仿生鱼尾,包括驱动部件、杆件、齿轮、连接件和铰接孔,其中驱动部件包括防水电机、蜗轮、蜗杆,杆件包括曲柄、一级摇杆上、一级摇杆下、二级摇杆上、二级摇杆下、连杆,尾鳍连接件和尾鳍,连接件包括鱼体支架、定转轴、动转轴;防水电机固定在仿生鱼躯体末端的鱼体支架上,防水电机与蜗杆连接,蜗杆与蜗轮配合;通过防水电机为整套机构提供动力,实现一级摇杆的摆动,通过齿轮传动比产生曲柄与一级摇杆的相对转角,实现二级摇杆相对于一级摇杆的相对摆动,通过齿轮传动比实现了三级摇杆相对于二级摇杆的相对摆动

一种鱼尾仿生形搅拌桨.pdf
本发明公开了一种鱼尾仿生形搅拌桨,包括固定套和多组仿生形叶片,仿生形叶片以固定套为中心呈环形阵列分布,仿生形叶片包括第一叶片和第二叶片,第一叶片一端与固定套连接,另一端与第二叶片连接;固定套外侧安装有盘体,盘体上环形阵列安装有多组仿生形叶片;固定套内套有连接轴,连接轴沿其轴向安装多层仿生形叶片。本发明可以大大降低桨叶后方产生的尾涡,减少尾涡造成的滞留死区,显著降低搅拌桨叶周围流体流动阻力,提高能量利用效率,同时鱼尾仿生形搅拌桨的结构简单,易于加工,降低了制造成本;在搅拌过程中,尾鳍式三角叶片推动流体作径向
一种新型仿生鱼尾推进装置.pdf
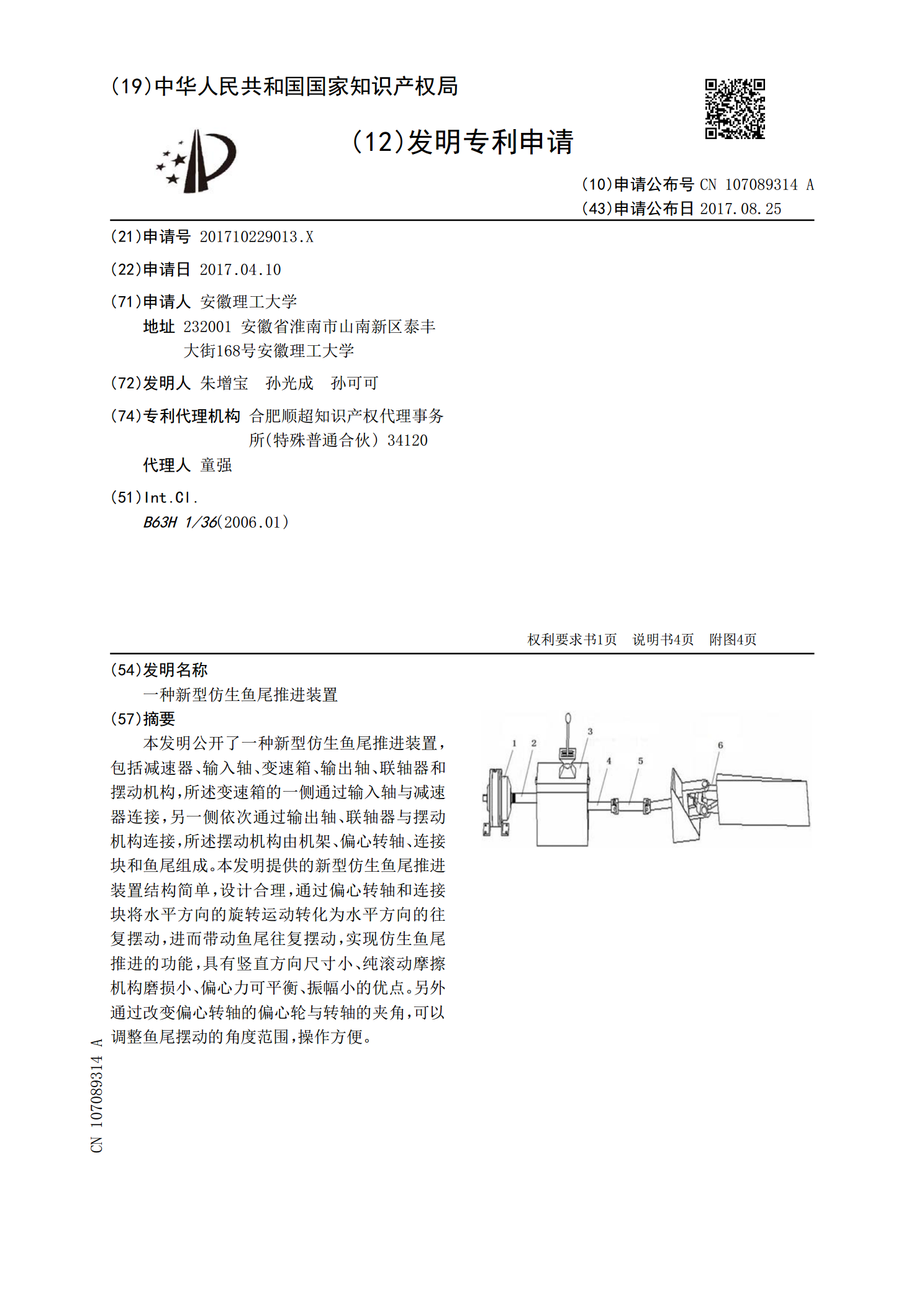
本发明公开了一种新型仿生鱼尾推进装置,包括减速器、输入轴、变速箱、输出轴、联轴器和摆动机构,所述变速箱的一侧通过输入轴与减速器连接,另一侧依次通过输出轴、联轴器与摆动机构连接,所述摆动机构由机架、偏心转轴、连接块和鱼尾组成。本发明提供的新型仿生鱼尾推进装置结构简单,设计合理,通过偏心转轴和连接块将水平方向的旋转运动转化为水平方向的往复摆动,进而带动鱼尾往复摆动,实现仿生鱼尾推进的功能,具有竖直方向尺寸小、纯滚动摩擦机构磨损小、偏心力可平衡、振幅小的优点。另外通过改变偏心转轴的偏心轮与转轴的夹角,可以调整鱼

仿生鱼尾推进装置.pdf
本发明涉及一种仿生鱼尾推进装置,包括壳体、侧臂、齿条组件、不完全齿轮、活塞滑块、缸体、仿生鱼尾,其技术要点是:所述齿条组件可滑动的限位在壳体内,齿条组件包括腰圆环形结构,该环形结构长边的内壁上各设有一齿条,环形结构两端设有条形的耳部结构,不完全齿轮限位在壳体上,并与齿条组件的其中一个齿条相啮合,耳部结构上固定有活塞滑块,活塞滑块可滑动的限位在固定于壳体端部缸体内,活塞滑块另一端固定侧臂固定,左右两侧臂之间固定有仿生鱼尾。通过不完全齿轮与齿条组件啮合传动,带动齿条组件、左右侧臂以及鱼尾实现往复摆动,仿生鱼尾
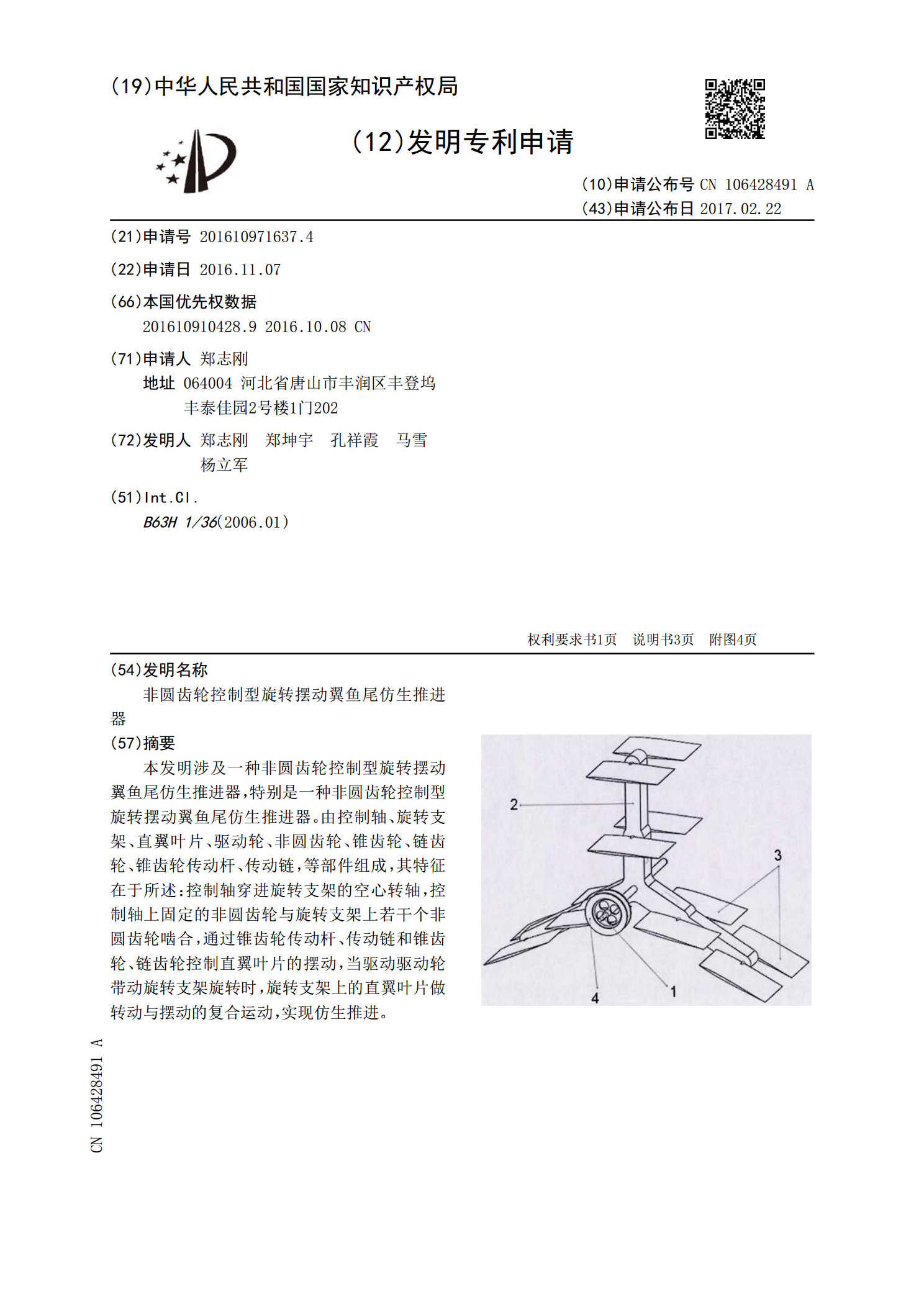
非圆齿轮控制型旋转摆动翼鱼尾仿生推进器.pdf
本发明涉及一种非圆齿轮控制型旋转摆动翼鱼尾仿生推进器,特别是一种非圆齿轮控制型旋转摆动翼鱼尾仿生推进器。由控制轴、旋转支架、直翼叶片、驱动轮、非圆齿轮、锥齿轮、链齿轮、锥齿轮传动杆、传动链,等部件组成,其特征在于所述:控制轴穿进旋转支架的空心转轴,控制轴上固定的非圆齿轮与旋转支架上若干个非圆齿轮啮合,通过锥齿轮传动杆、传动链和锥齿轮、链齿轮控制直翼叶片的摆动,当驱动驱动轮带动旋转支架旋转时,旋转支架上的直翼叶片做转动与摆动的复合运动,实现仿生推进。