
非圆齿轮控制型旋转摆动翼鱼尾仿生推进器.pdf

书生****aa

1/9
2/9
3/9
4/9
5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
非圆齿轮控制型旋转摆动翼鱼尾仿生推进器.pdf
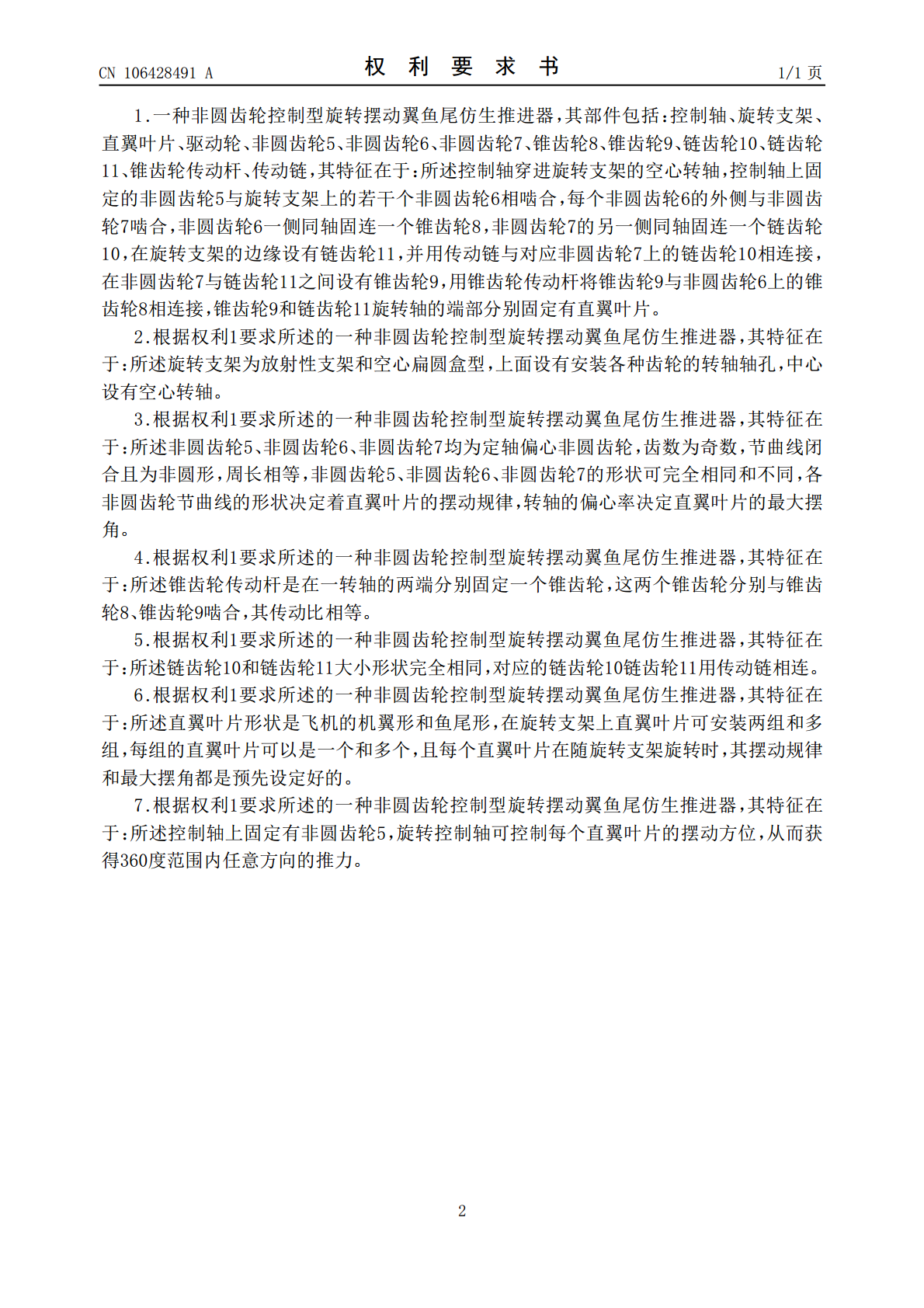
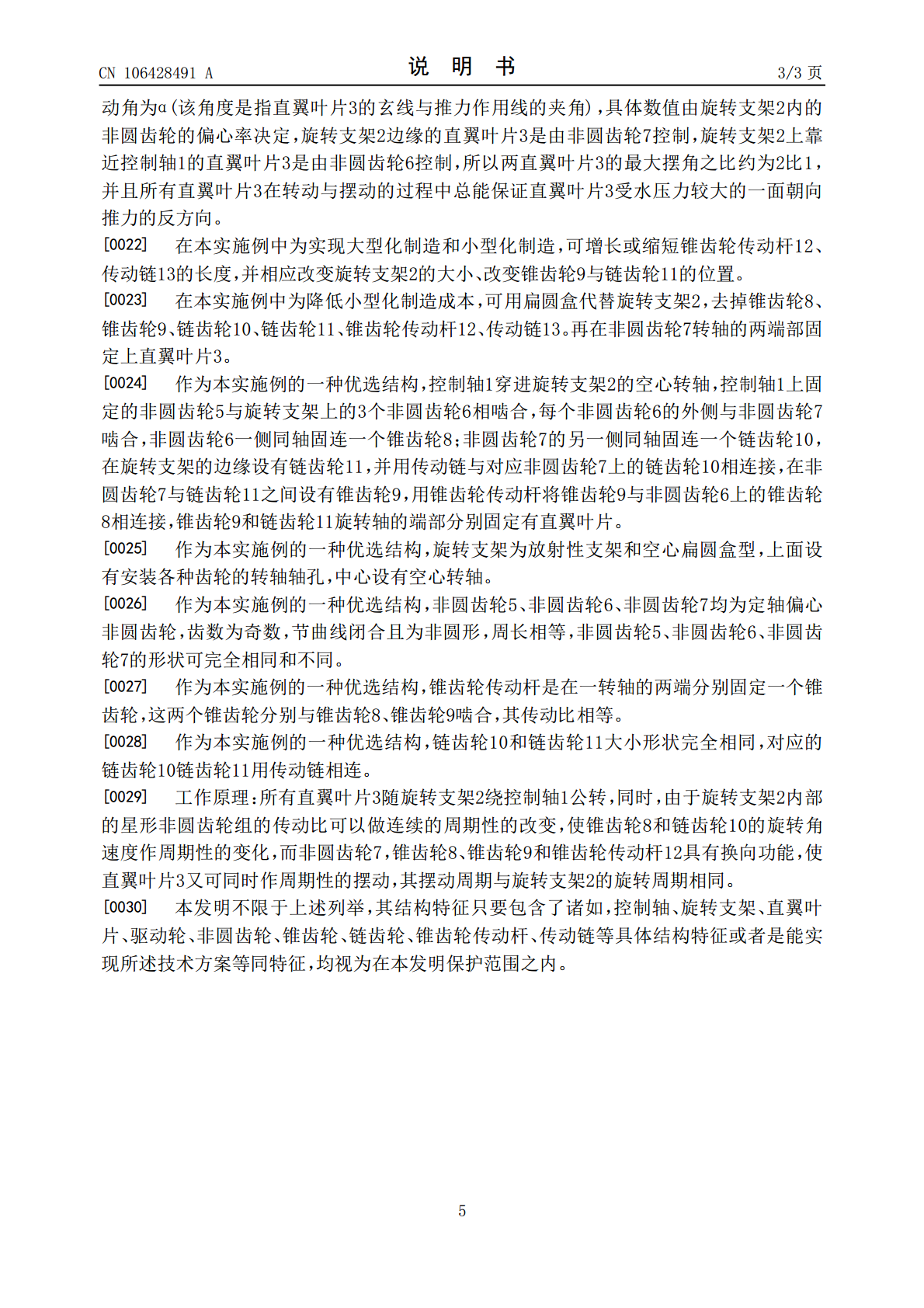
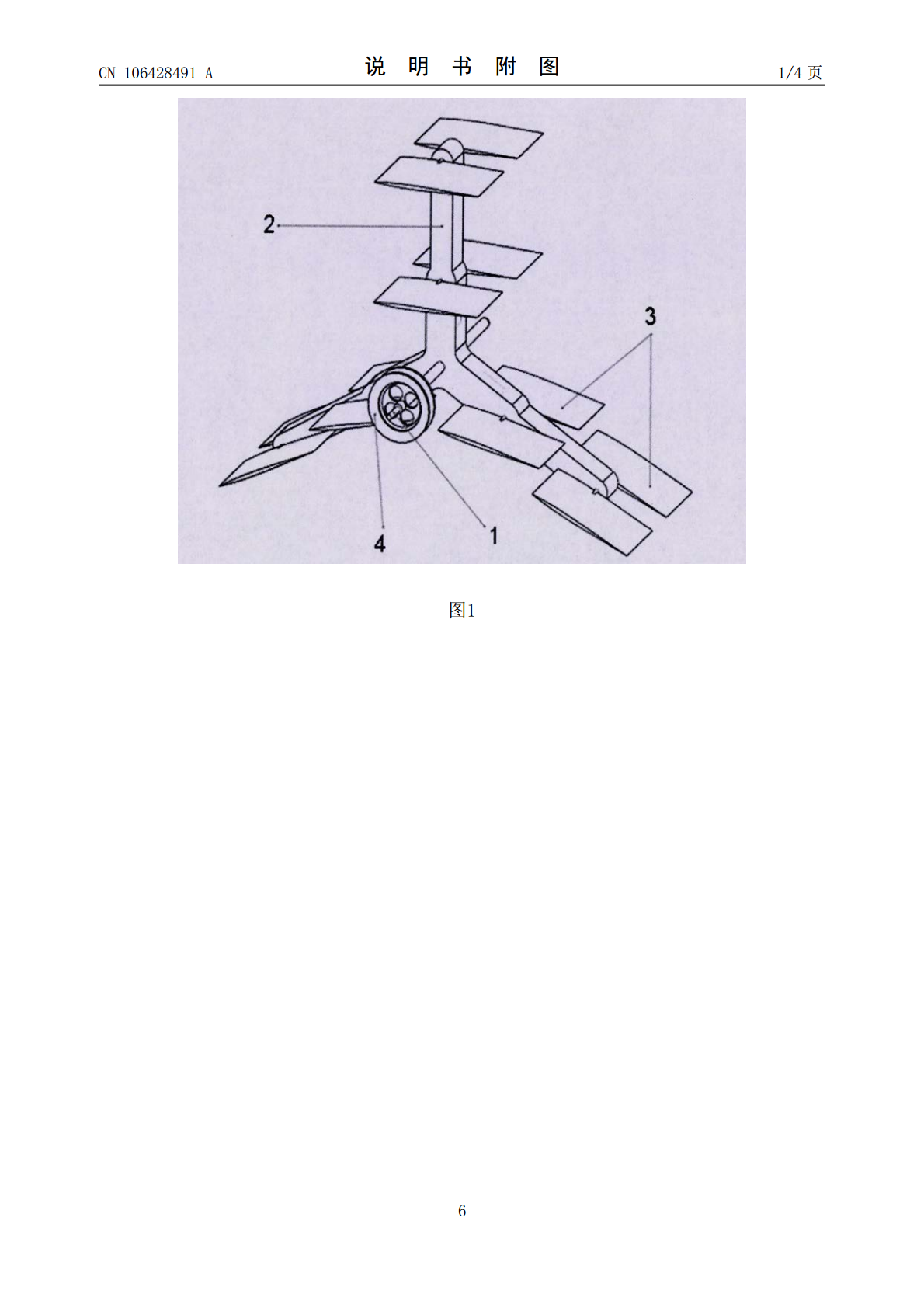
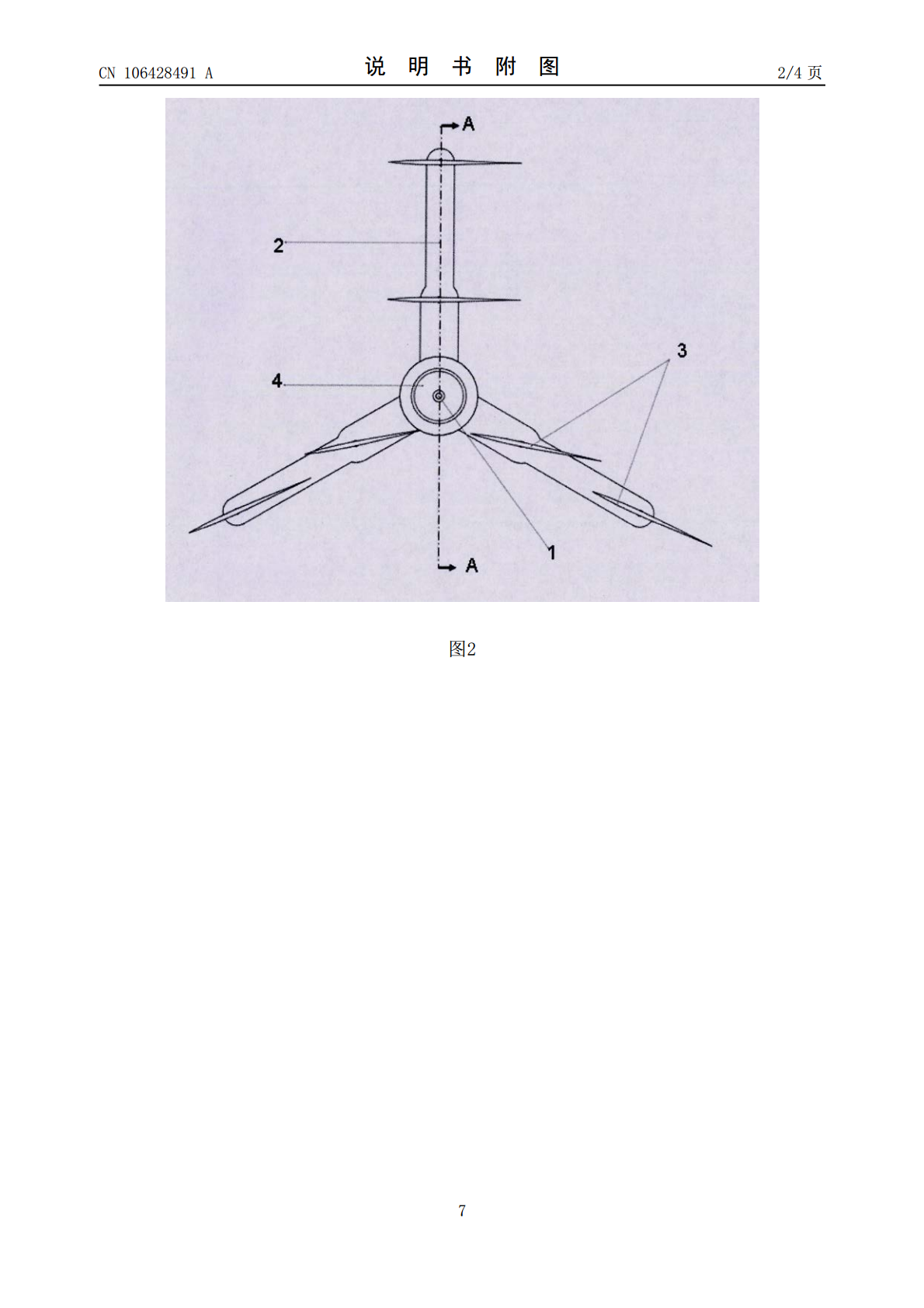
本发明涉及一种非圆齿轮控制型旋转摆动翼鱼尾仿生推进器,特别是一种非圆齿轮控制型旋转摆动翼鱼尾仿生推进器。由控制轴、旋转支架、直翼叶片、驱动轮、非圆齿轮、锥齿轮、链齿轮、锥齿轮传动杆、传动链,等部件组成,其特征在于所述:控制轴穿进旋转支架的空心转轴,控制轴上固定的非圆齿轮与旋转支架上若干个非圆齿轮啮合,通过锥齿轮传动杆、传动链和锥齿轮、链齿轮控制直翼叶片的摆动,当驱动驱动轮带动旋转支架旋转时,旋转支架上的直翼叶片做转动与摆动的复合运动,实现仿生推进。
仿生机器鱼尾部摆动机构.pdf
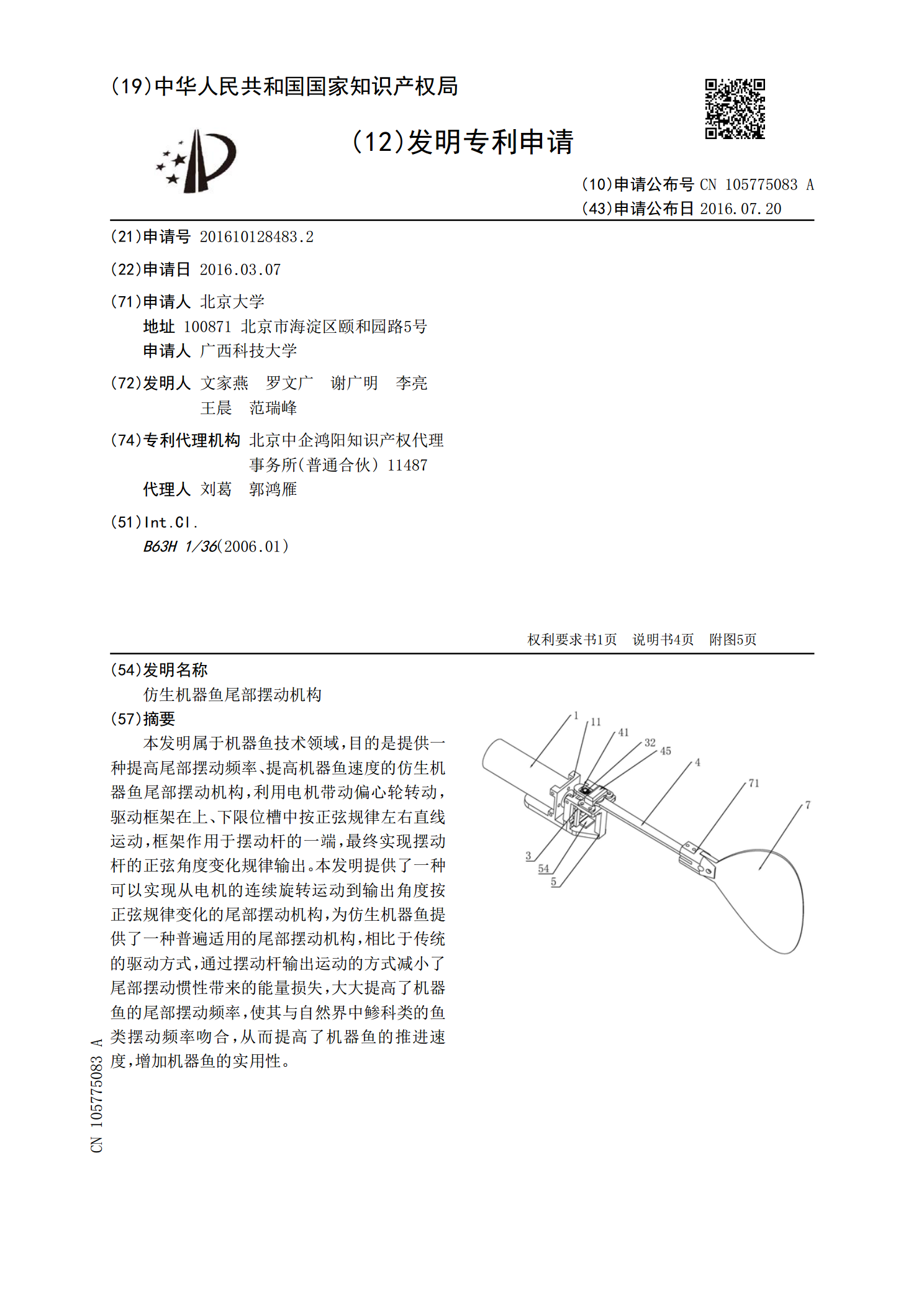
本发明属于机器鱼技术领域,目的是提供一种提高尾部摆动频率、提高机器鱼速度的仿生机器鱼尾部摆动机构,利用电机带动偏心轮转动,驱动框架在上、下限位槽中按正弦规律左右直线运动,框架作用于摆动杆的一端,最终实现摆动杆的正弦角度变化规律输出。本发明提供了一种可以实现从电机的连续旋转运动到输出角度按正弦规律变化的尾部摆动机构,为仿生机器鱼提供了一种普遍适用的尾部摆动机构,相比于传统的驱动方式,通过摆动杆输出运动的方式减小了尾部摆动惯性带来的能量损失,大大提高了机器鱼的尾部摆动频率,使其与自然界中鲹科类的鱼类摆动频率吻
基于阻尼弹性复合机理的仿生鱼尾推进器.pdf
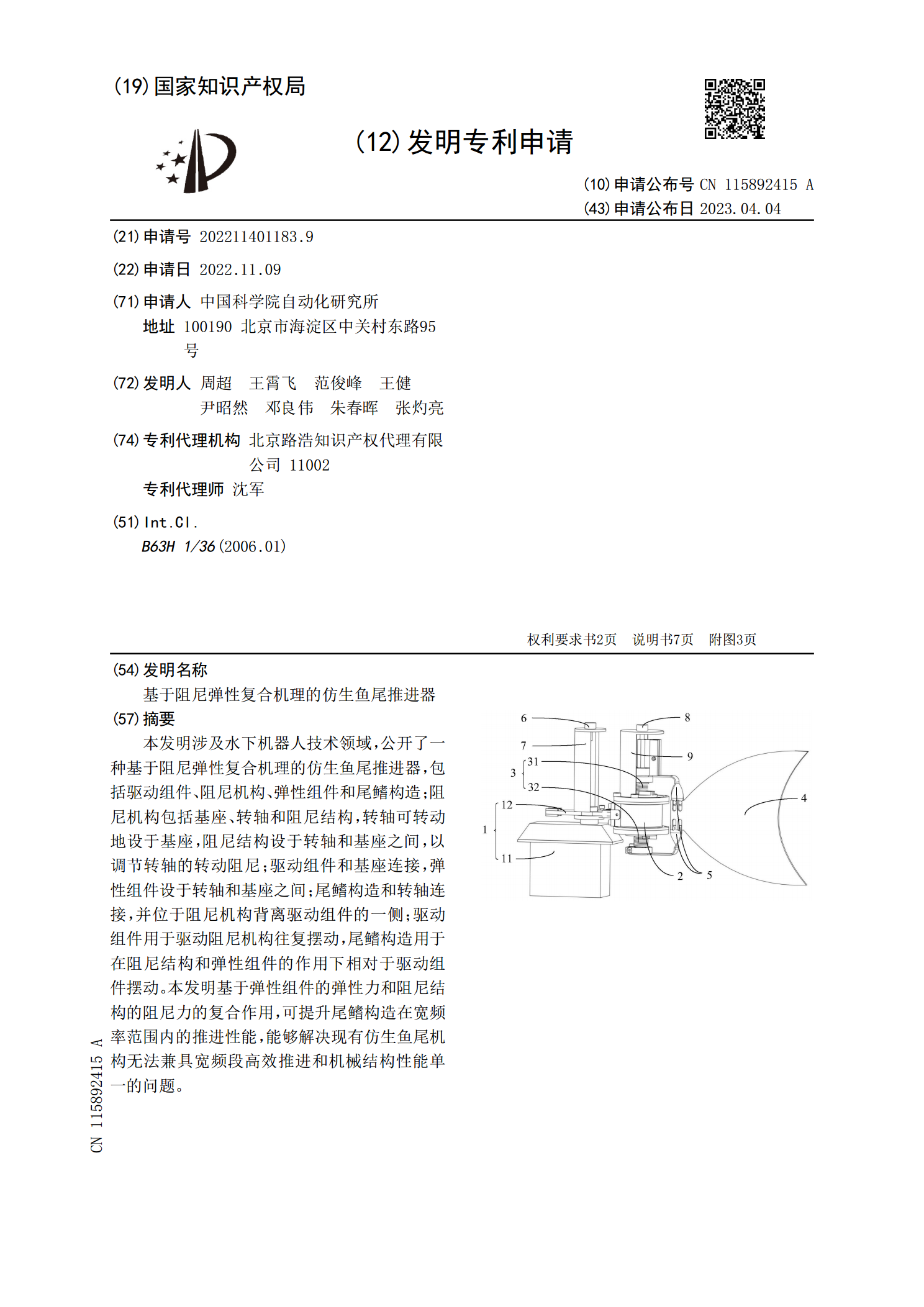
本发明涉及水下机器人技术领域,公开了一种基于阻尼弹性复合机理的仿生鱼尾推进器,包括驱动组件、阻尼机构、弹性组件和尾鳍构造;阻尼机构包括基座、转轴和阻尼结构,转轴可转动地设于基座,阻尼结构设于转轴和基座之间,以调节转轴的转动阻尼;驱动组件和基座连接,弹性组件设于转轴和基座之间;尾鳍构造和转轴连接,并位于阻尼机构背离驱动组件的一侧;驱动组件用于驱动阻尼机构往复摆动,尾鳍构造用于在阻尼结构和弹性组件的作用下相对于驱动组件摆动。本发明基于弹性组件的弹性力和阻尼结构的阻尼力的复合作用,可提升尾鳍构造在宽频率范围内的
采用非圆齿轮驱动的旋转棱镜装置.pdf
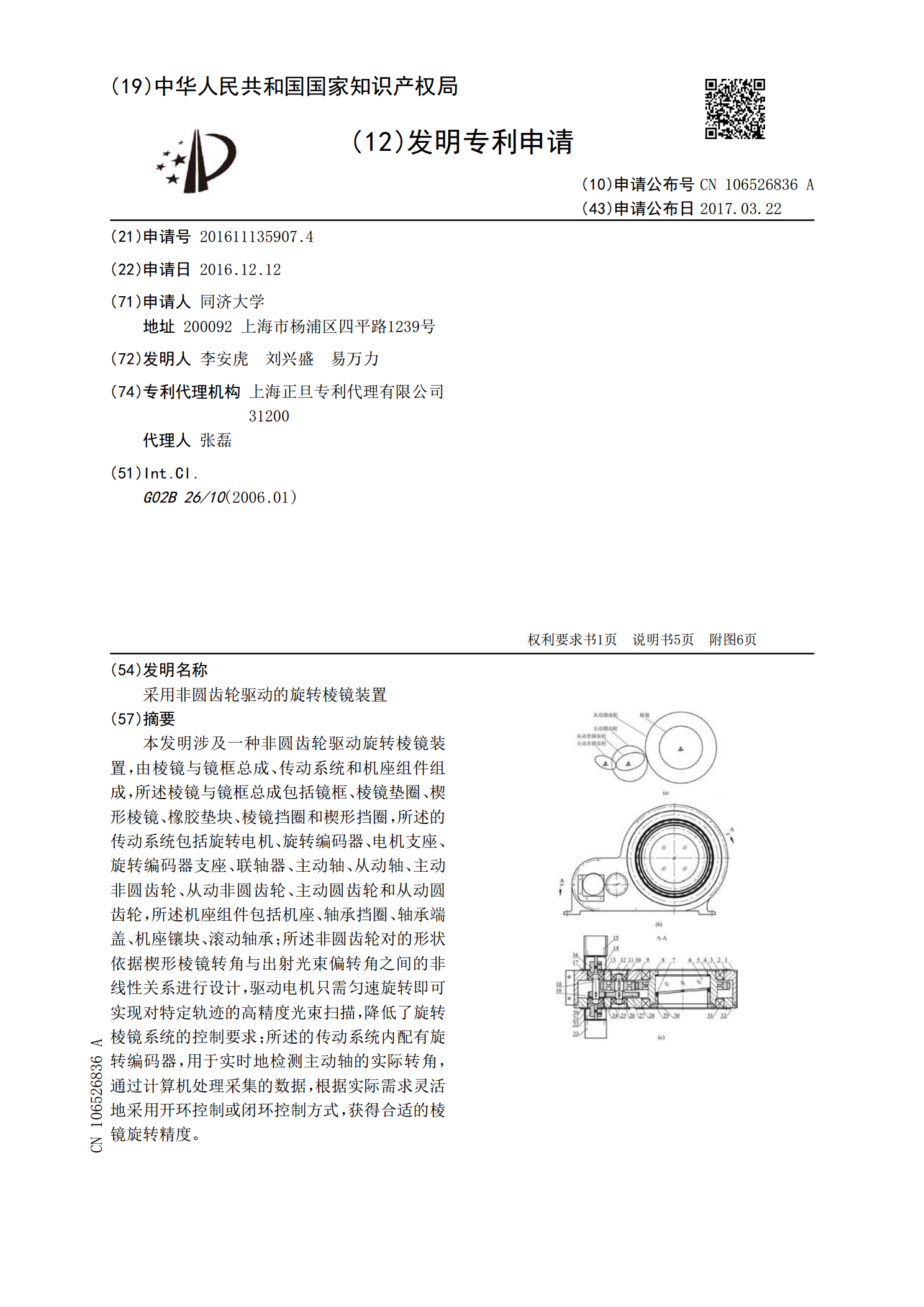
本发明涉及一种非圆齿轮驱动旋转棱镜装置,由棱镜与镜框总成、传动系统和机座组件组成,所述棱镜与镜框总成包括镜框、棱镜垫圈、楔形棱镜、橡胶垫块、棱镜挡圈和楔形挡圈,所述的传动系统包括旋转电机、旋转编码器、电机支座、旋转编码器支座、联轴器、主动轴、从动轴、主动非圆齿轮、从动非圆齿轮、主动圆齿轮和从动圆齿轮,所述机座组件包括机座、轴承挡圈、轴承端盖、机座镶块、滚动轴承;所述非圆齿轮对的形状依据楔形棱镜转角与出射光束偏转角之间的非线性关系进行设计,驱动电机只需匀速旋转即可实现对特定轨迹的高精度光束扫描,降低了旋转棱

非圆齿轮精密型分割器.pdf
非圆齿轮精密型分割器包括一个箱体,箱体上有底板,中间隔板,桌台板,导柱,以及固定在底板上的太阳非圆齿轮。箱体上通过轴承支撑有行星架,行星架作为装置的动力输入;行星架通过轴承联接行星齿轮轴,行星齿轮轴的一端为行星非圆齿轮,其与固定在箱体上的太阳非圆齿轮啮合,另一端为行星圆柱齿轮,与输出轴上的输出非圆齿轮啮合。由于采用了外啮合非圆齿轮-圆柱齿轮差动轮系组合机构,分度运动由行星轮和行星架运动合成,具有良好的动力学特性和较大的分度数;使用端面凸轮插销定位的方式,靠孔轴的配合来保证精度,定位精度高,成本低,定位动作