
一种多轮驱动履带车辆的电驱动系统及其控制方法.pdf

一条****贺6

1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种多轮驱动履带车辆的电驱动系统及其控制方法.pdf
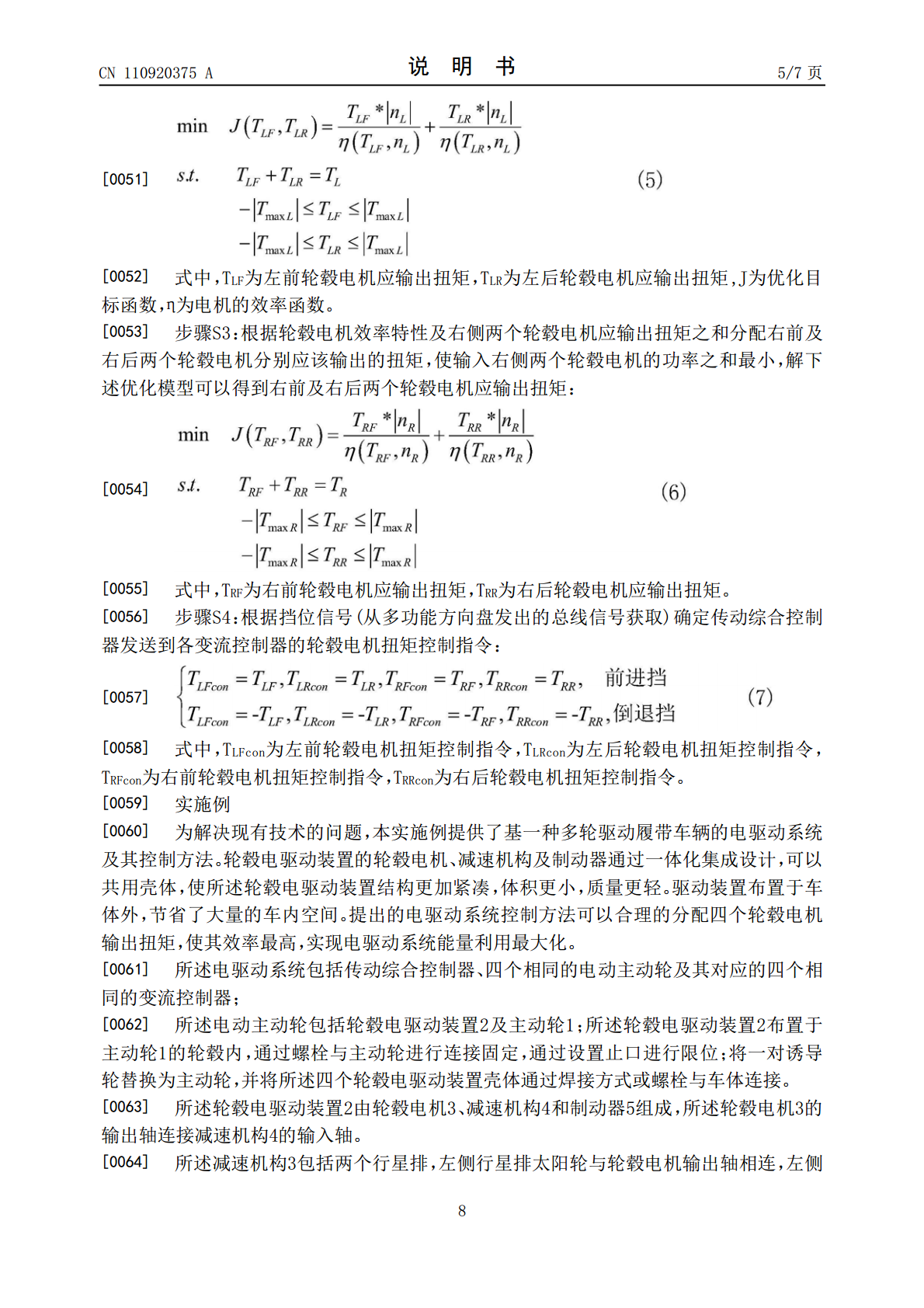
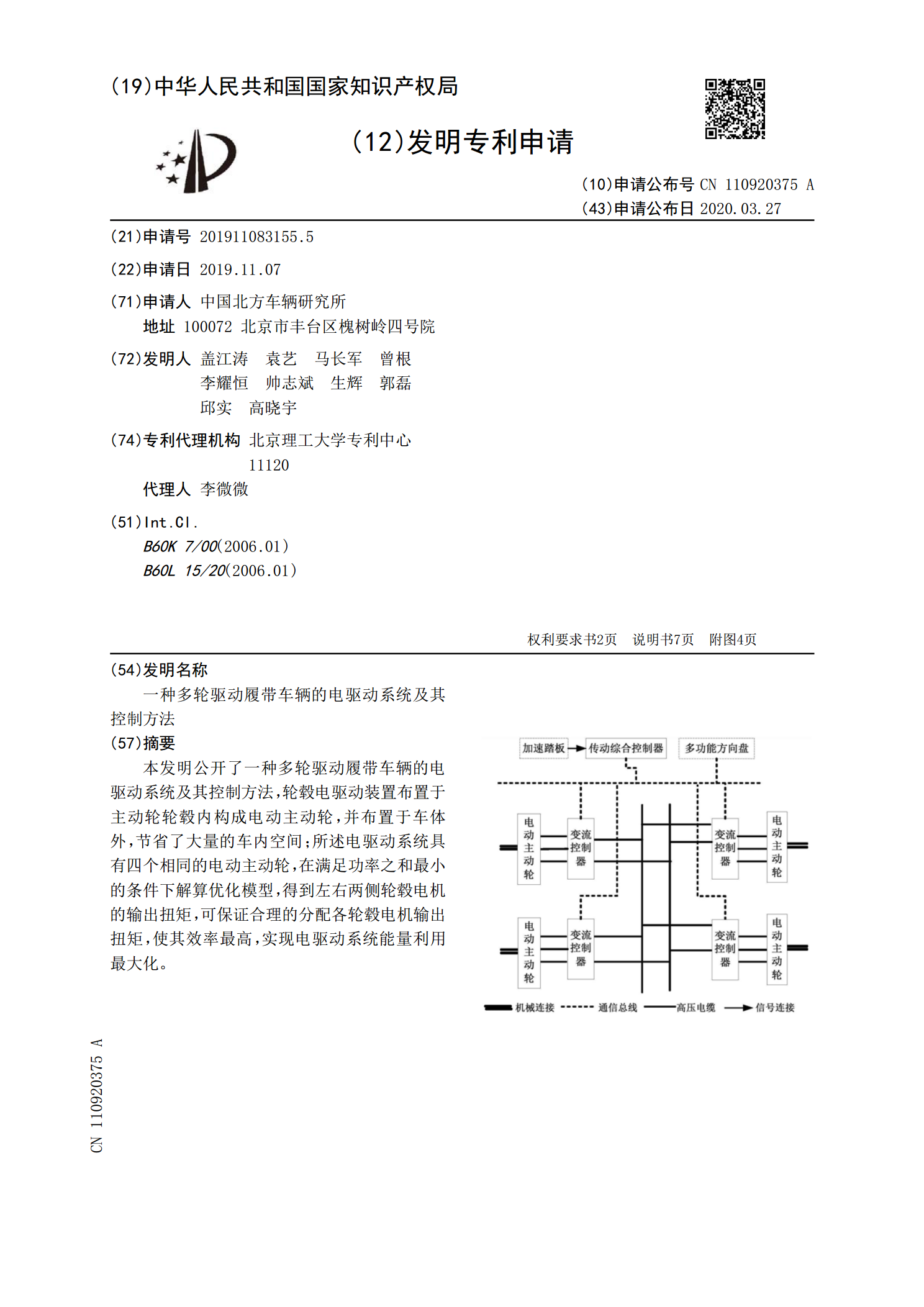
本发明公开了一种多轮驱动履带车辆的电驱动系统及其控制方法,轮毂电驱动装置布置于主动轮轮毂内构成电动主动轮,并布置于车体外,节省了大量的车内空间;所述电驱动系统具有四个相同的电动主动轮,在满足功率之和最小的条件下解算优化模型,得到左右两侧轮毂电机的输出扭矩,可保证合理的分配各轮毂电机输出扭矩,使其效率最高,实现电驱动系统能量利用最大化。
用于车辆的电驱动系统及其控制方法及车辆.pdf
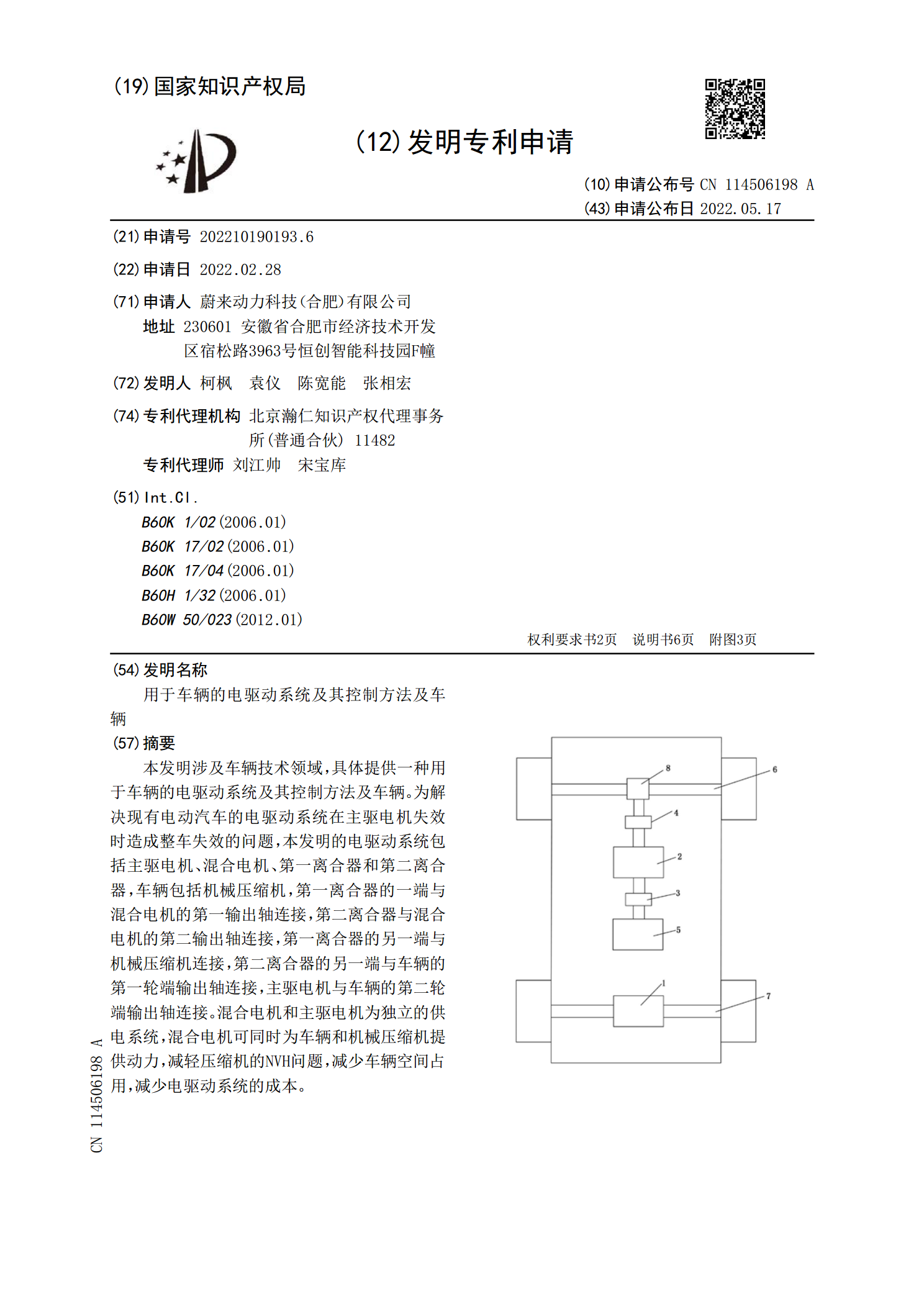
本发明涉及车辆技术领域,具体提供一种用于车辆的电驱动系统及其控制方法及车辆。为解决现有电动汽车的电驱动系统在主驱电机失效时造成整车失效的问题,本发明的电驱动系统包括主驱电机、混合电机、第一离合器和第二离合器,车辆包括机械压缩机,第一离合器的一端与混合电机的第一输出轴连接,第二离合器与混合电机的第二输出轴连接,第一离合器的另一端与机械压缩机连接,第二离合器的另一端与车辆的第一轮端输出轴连接,主驱电机与车辆的第二轮端输出轴连接。混合电机和主驱电机为独立的供电系统,混合电机可同时为车辆和机械压缩机提供动力,减轻
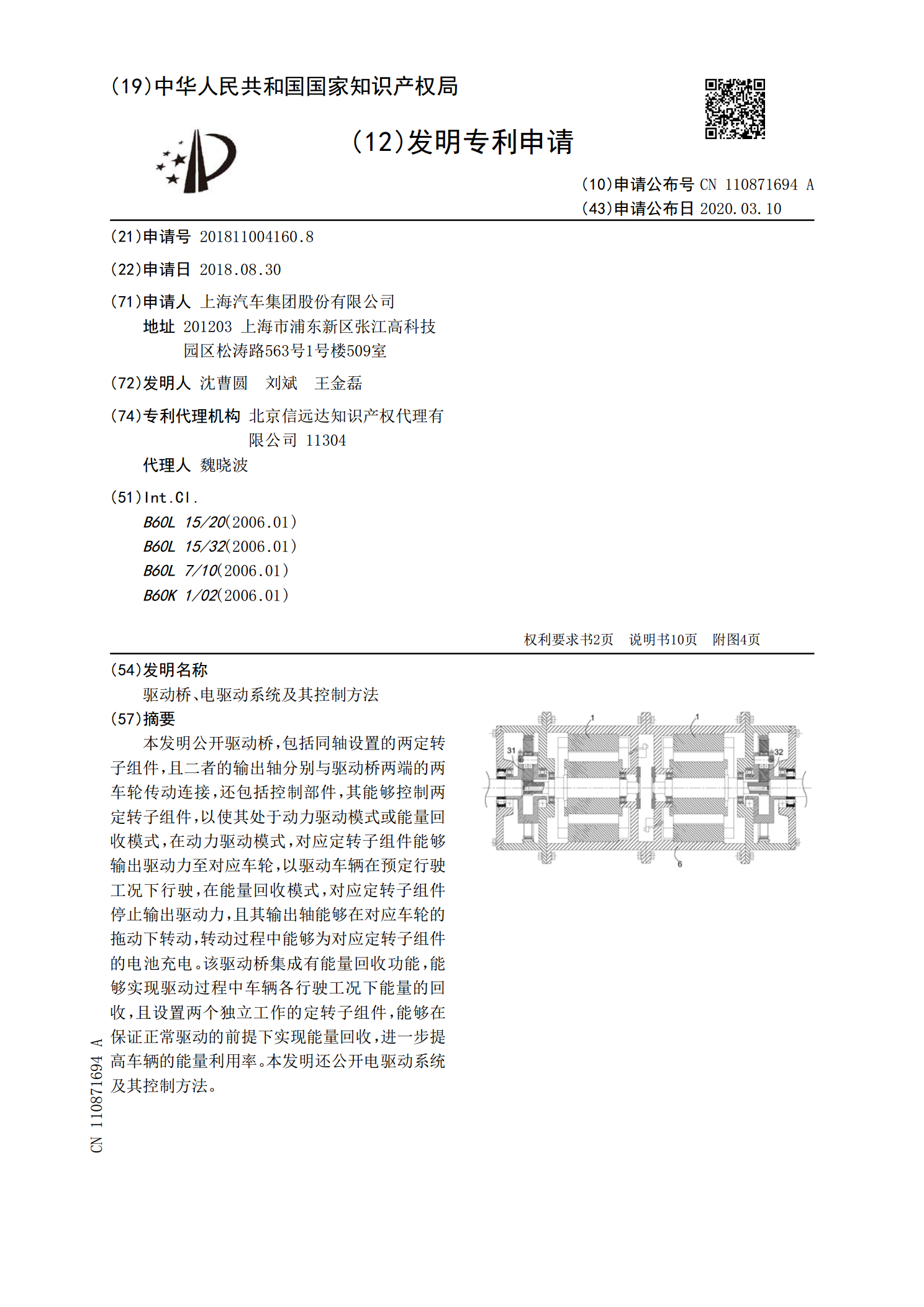
驱动桥、电驱动系统及其控制方法.pdf
本发明公开驱动桥,包括同轴设置的两定转子组件,且二者的输出轴分别与驱动桥两端的两车轮传动连接,还包括控制部件,其能够控制两定转子组件,以使其处于动力驱动模式或能量回收模式,在动力驱动模式,对应定转子组件能够输出驱动力至对应车轮,以驱动车辆在预定行驶工况下行驶,在能量回收模式,对应定转子组件停止输出驱动力,且其输出轴能够在对应车轮的拖动下转动,转动过程中能够为对应定转子组件的电池充电。该驱动桥集成有能量回收功能,能够实现驱动过程中车辆各行驶工况下能量的回收,且设置两个独立工作的定转子组件,能够在保证正常驱动
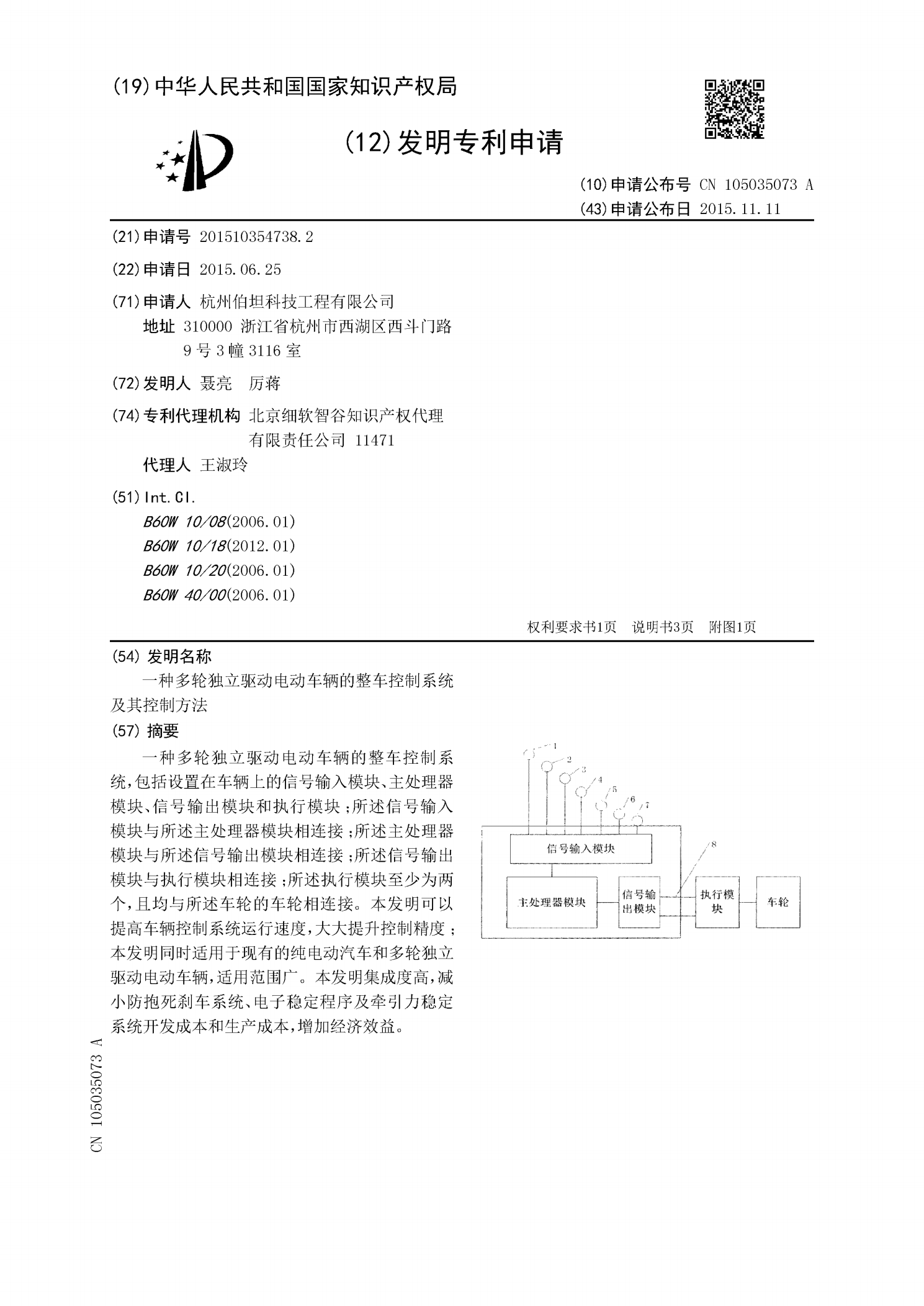
一种多轮独立驱动电动车辆的整车控制系统及其控制方法.pdf
一种多轮独立驱动电动车辆的整车控制系统,包括设置在车辆上的信号输入模块、主处理器模块、信号输出模块和执行模块;所述信号输入模块与所述主处理器模块相连接;所述主处理器模块与所述信号输出模块相连接;所述信号输出模块与执行模块相连接;所述执行模块至少为两个,且均与所述车轮的车轮相连接。本发明可以提高车辆控制系统运行速度,大大提升控制精度;本发明同时适用于现有的纯电动汽车和多轮独立驱动电动车辆,适用范围广。本发明集成度高,减小防抱死刹车系统、电子稳定程序及牵引力稳定系统开发成本和生产成本,增加经济效益。

四轮车辆的车轮驱动控制系统及其车轮驱动控制方法.pdf
一种四轮车辆的车轮驱动控制系统及其控制方法,其车轮驱动控制系统包含前、后轮差速控制模组、行车动力控制单元及控制单元。前轮差速控制模组根据控制信号使两轮前输出轴在同步转动与差速转动之间切换。后轮差速控制模组根据控制信号使两后轮输出轴在同步转动与差速转动之间切换。行车动力控制单元用以根据一动力配置讯号控制行车动力至车轮。控制单元分别电性连接于前轮差速控制模组、后轮差速控制模组与行车动力控制单元,其用以根据行车模式讯号提供对应的控制信号及动力配置讯号至前轮差速控制模组、后轮差速控制模组与行车动力控制单元。