
一种基于矢量飞行的爬壁机器人.pdf

书生****文章


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于矢量飞行的爬壁机器人.pdf
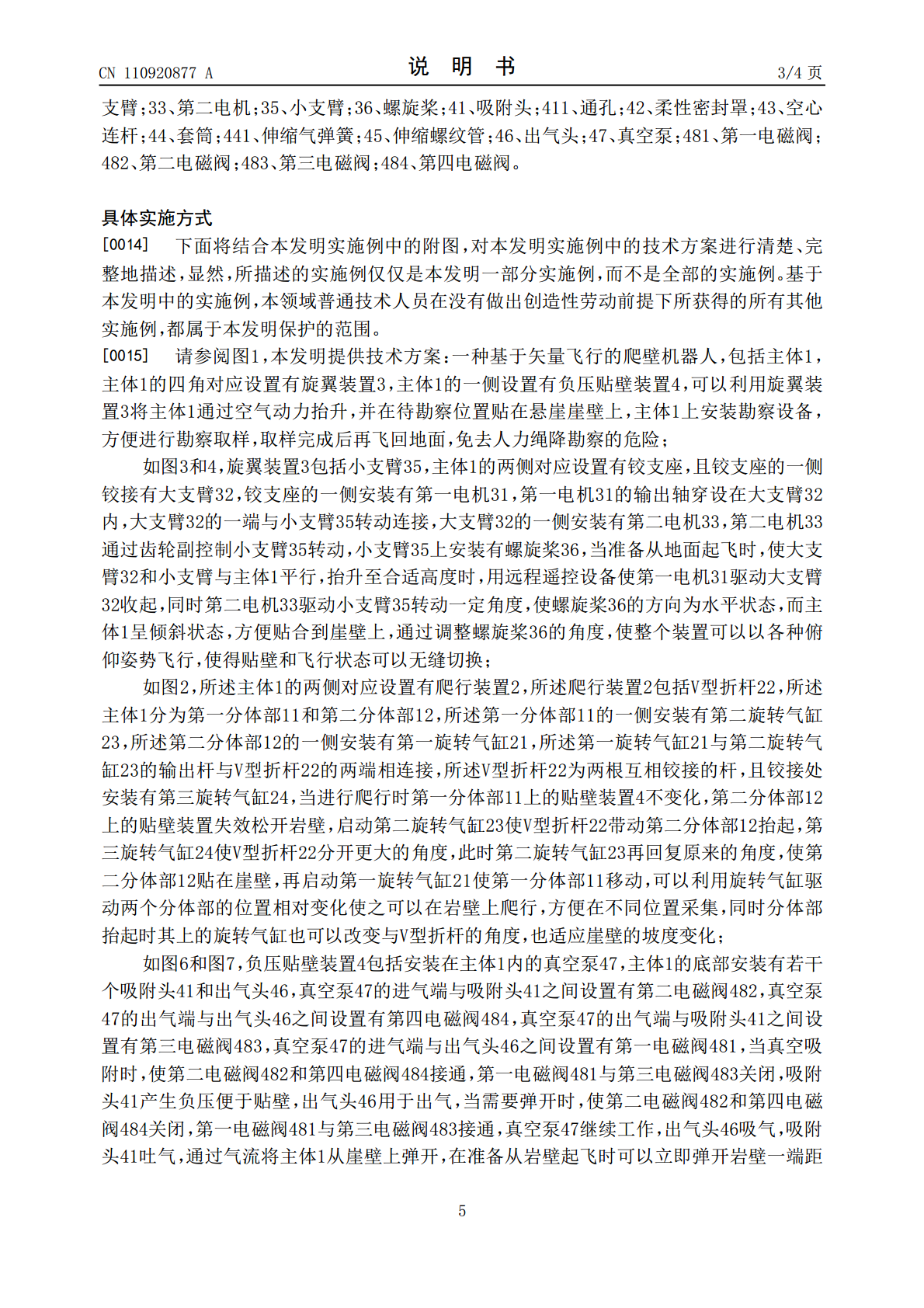
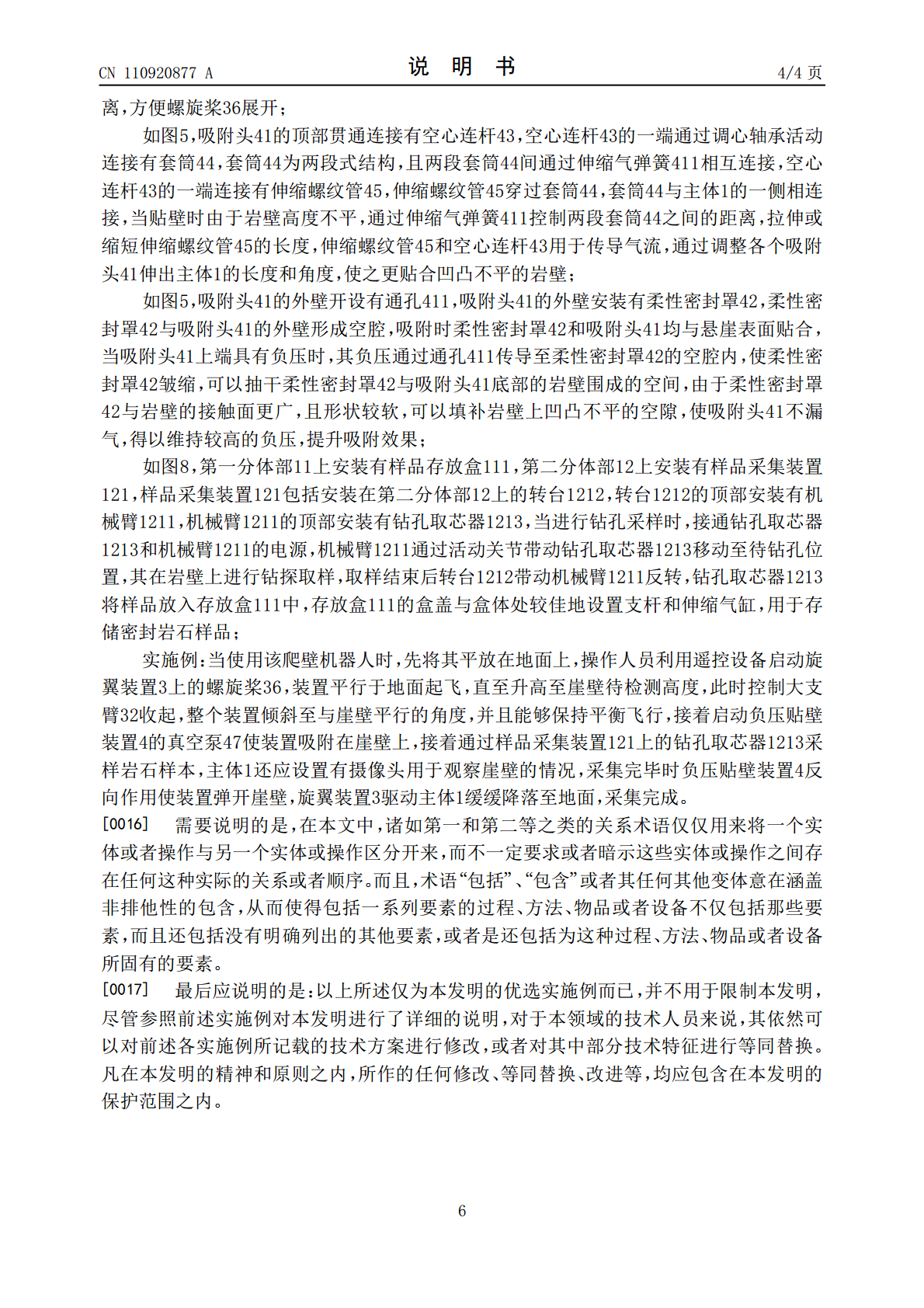
本发明公开了一种基于矢量飞行的爬壁机器人,包括主体,所述主体的四角对应设置有旋翼装置,所述主体的一侧设置有负压贴壁装置,所述旋翼装置包括小支臂,所述主体的两侧对应设置有铰支座,且铰支座的一侧铰接有大支臂,所述铰支座的一侧安装有第一电机,所述第一电机的输出轴穿设在大支臂内,所述大支臂的一端与小支臂转动连接,所述大支臂的一侧安装有第二电机,所述第二电机通过齿轮副控制小支臂转动,所述小支臂上安装有螺旋桨,所述主体分为第一分体部和第二分体部,所述第一分体部的一侧安装有第二旋转气缸,所述第二分体部的一侧安装有第一旋

一种可自主上壁的飞行爬壁机器人及其使用方法.pdf
一种可自主上壁的飞行爬壁机器人,包括机器人壳体及其上设置的前主旋翼机构、后主旋翼机构、前副旋翼机构与后副旋翼机构,其中,前、后主旋翼机构中主旋翼叶片所在的主旋转区与机器人壳体的顶面相平行,前、后副旋翼机构中副旋翼叶片所在的副旋转区与机器人壳体的顶面相垂直,机器人壳体的四角各经驱动杆、转向舵机与方形履带轮相连接,机器人壳体前端的开口槽经辅助舵机与带伸缩杆的伸缩装置相连接,且在机器人壳体上设置有一个与其余设备进行信号连接的飞行控制器。本设计可以实现地面、自主上壁、壁面转换等爬壁行为,不仅适应性较强,自动化程度

一种多旋翼增压式飞行爬壁机器人.pdf
一种多旋翼增压式飞行爬壁机器人,包括主体及其上设置的多个旋翼装置,所述旋翼装置包括顶部旋翼机构与侧部旋翼机构,所述主体为框架式结构,主体的顶面上设置有顶部旋翼机构,主体的侧面上设置有侧部旋翼机构,主体的内部设置有设备箱,设备箱的顶部上设置有飞行控制器,飞行控制器与顶部旋翼机构、侧部旋翼机构进行电连接;所述主体的外凸角上连接有爬壁轮,爬壁轮、外凸角一一对应,且爬壁轮与飞行控制器进行电连接。本设计不仅适应能力较强,应用范围较广,而且设备融合度高,作业效率较高。
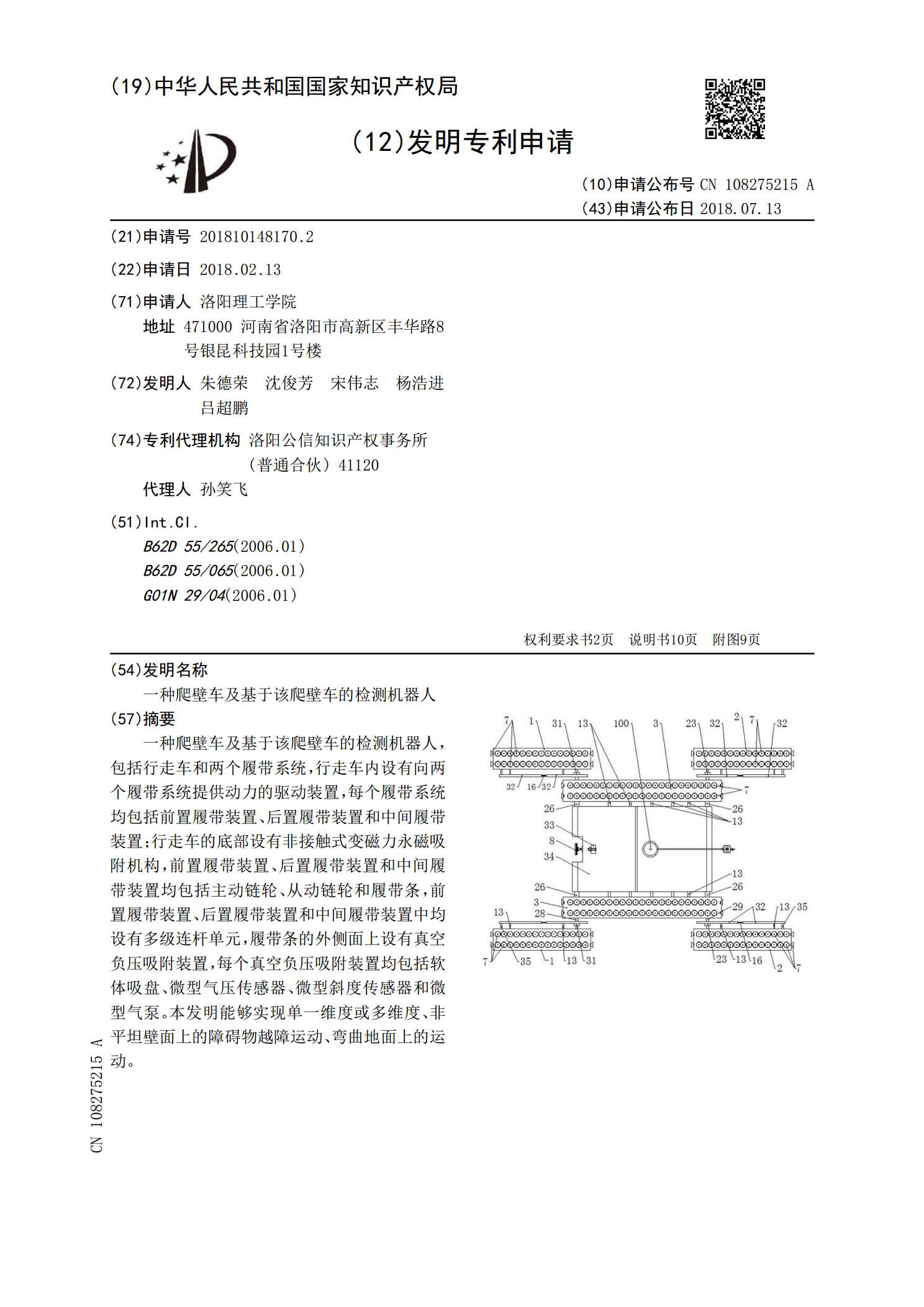
一种爬壁车及基于该爬壁车的检测机器人.pdf
一种爬壁车及基于该爬壁车的检测机器人,包括行走车和两个履带系统,行走车内设有向两个履带系统提供动力的驱动装置,每个履带系统均包括前置履带装置、后置履带装置和中间履带装置;行走车的底部设有非接触式变磁力永磁吸附机构,前置履带装置、后置履带装置和中间履带装置均包括主动链轮、从动链轮和履带条,前置履带装置、后置履带装置和中间履带装置中均设有多级连杆单元,履带条的外侧面上设有真空负压吸附装置,每个真空负压吸附装置均包括软体吸盘、微型气压传感器、微型斜度传感器和微型气泵。本发明能够实现单一维度或多维度、非平坦壁面上
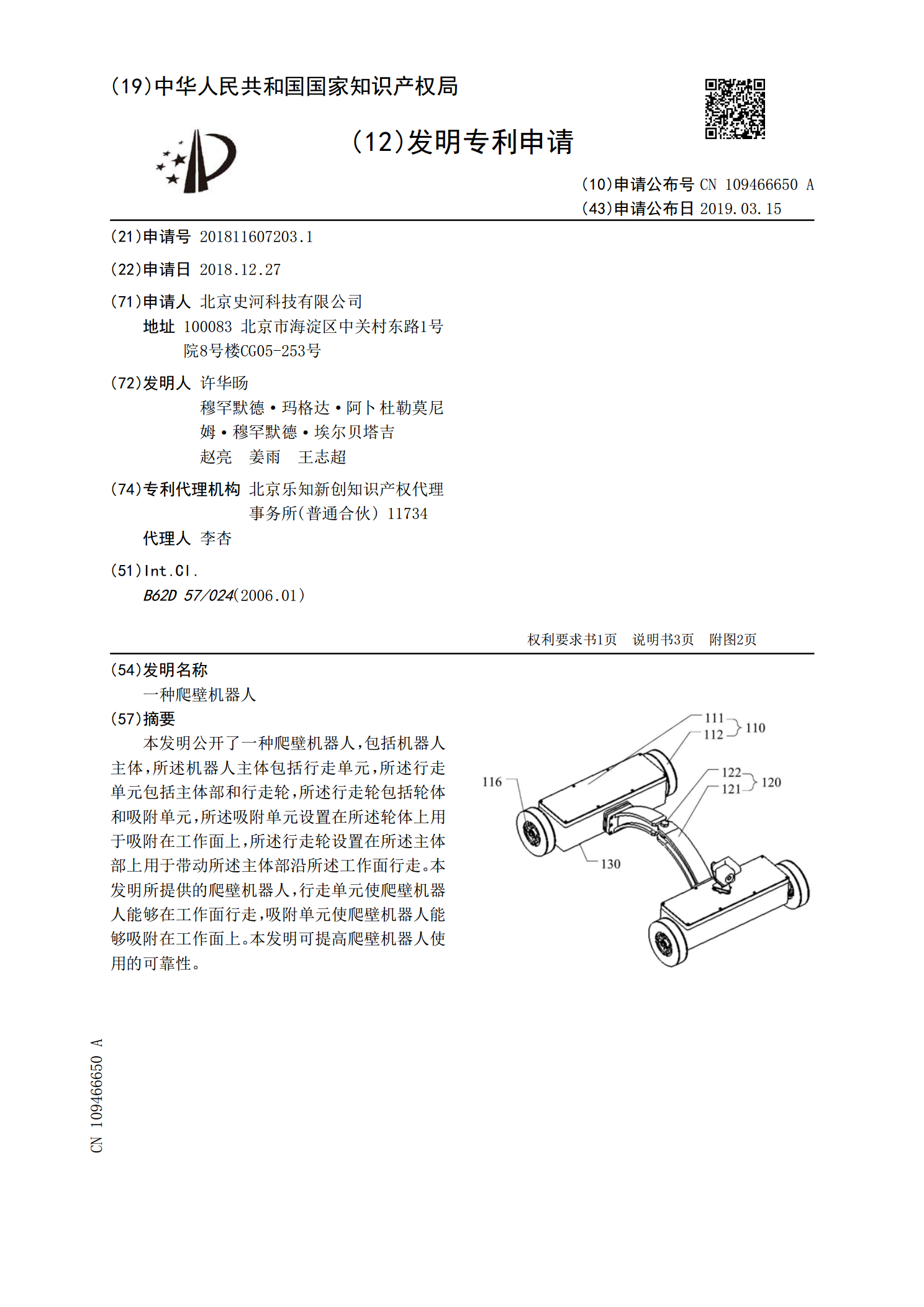
一种爬壁机器人.pdf
本发明公开了一种爬壁机器人,包括机器人主体,所述机器人主体包括行走单元,所述行走单元包括主体部和行走轮,所述行走轮包括轮体和吸附单元,所述吸附单元设置在所述轮体上用于吸附在工作面上,所述行走轮设置在所述主体部上用于带动所述主体部沿所述工作面行走。本发明所提供的爬壁机器人,行走单元使爬壁机器人能够在工作面行走,吸附单元使爬壁机器人能够吸附在工作面上。本发明可提高爬壁机器人使用的可靠性。