
移动装置和具有其的清洁机器人.pdf

是笛****加盟


1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
移动装置和具有其的清洁机器人.pdf
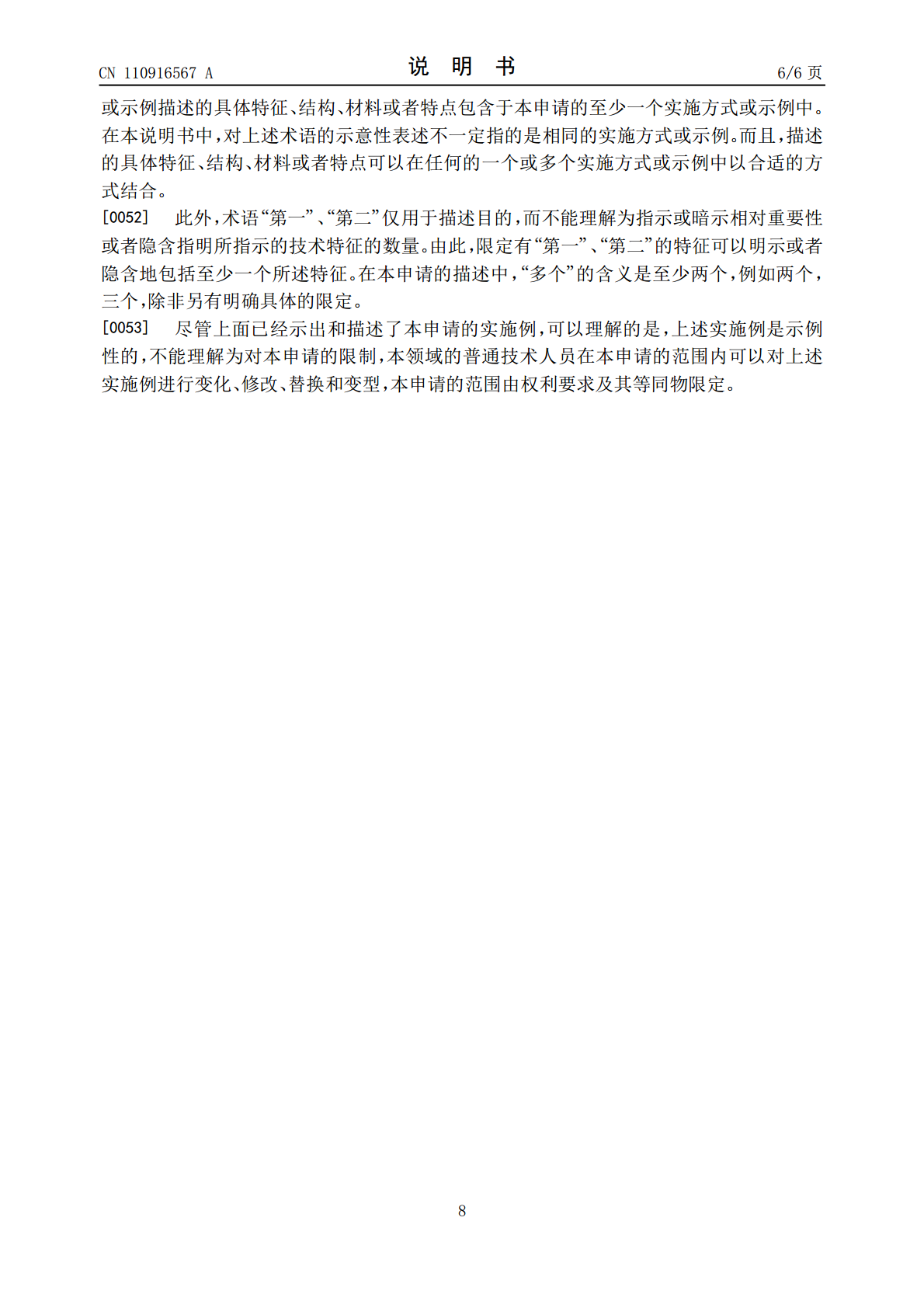
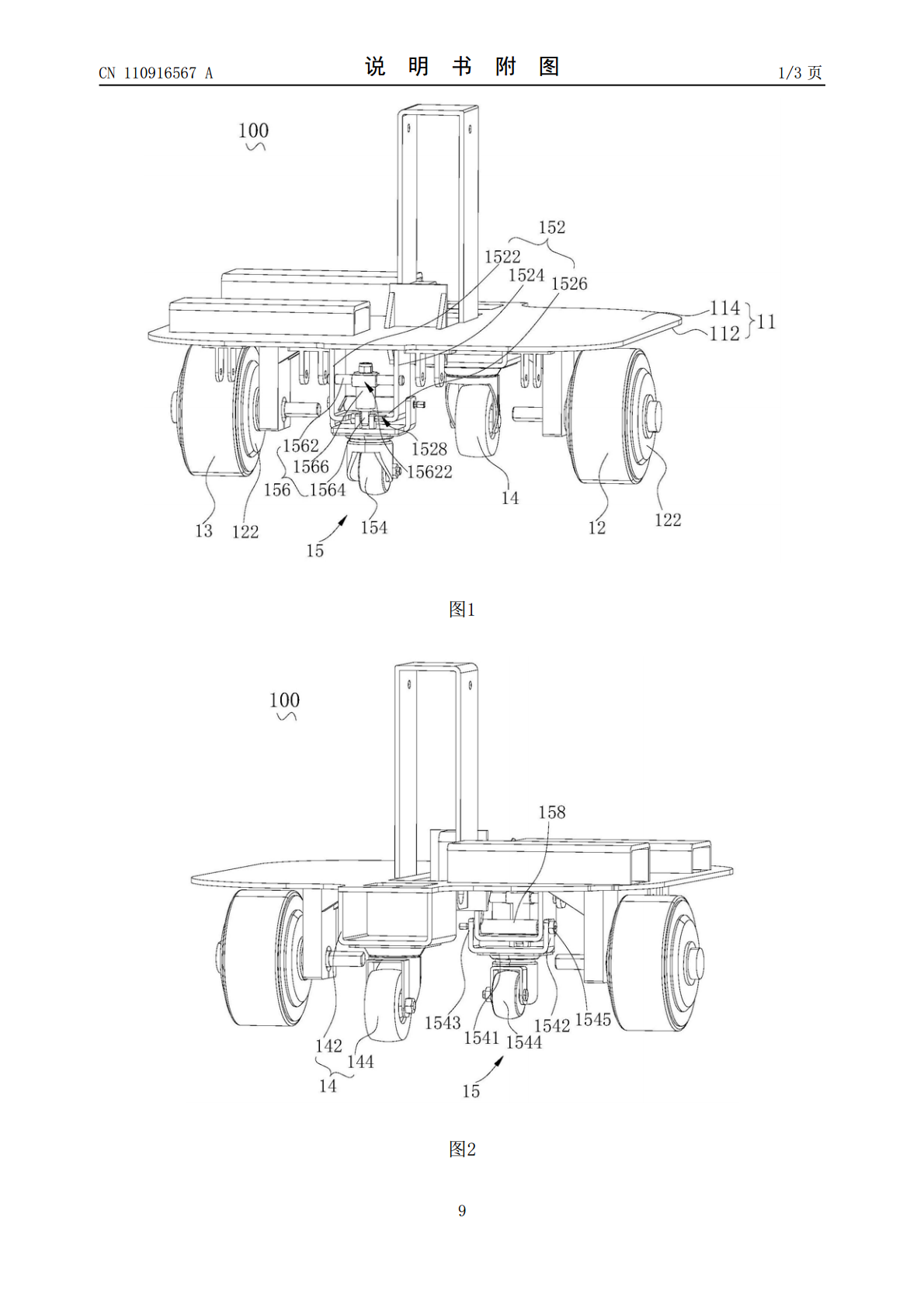
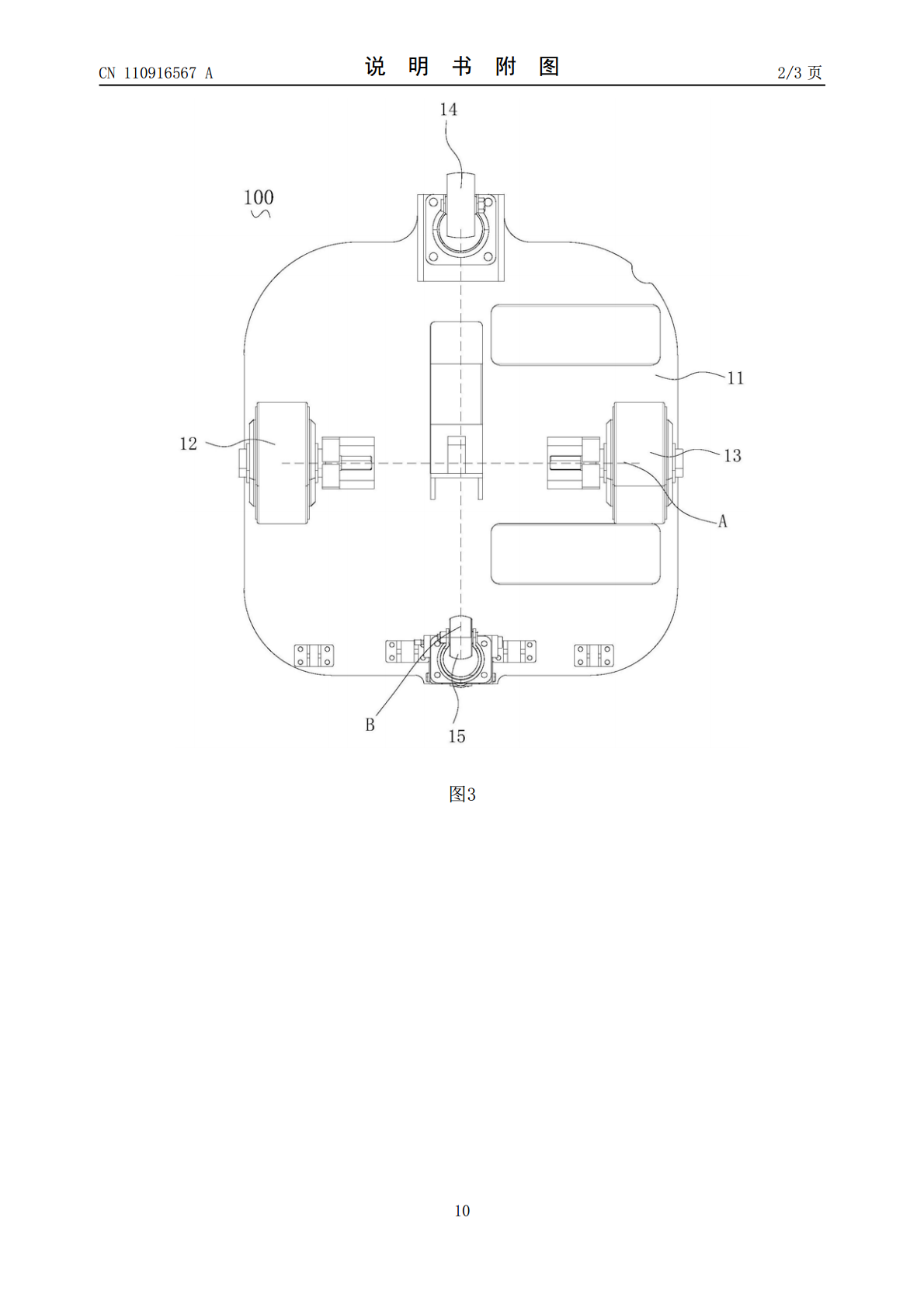
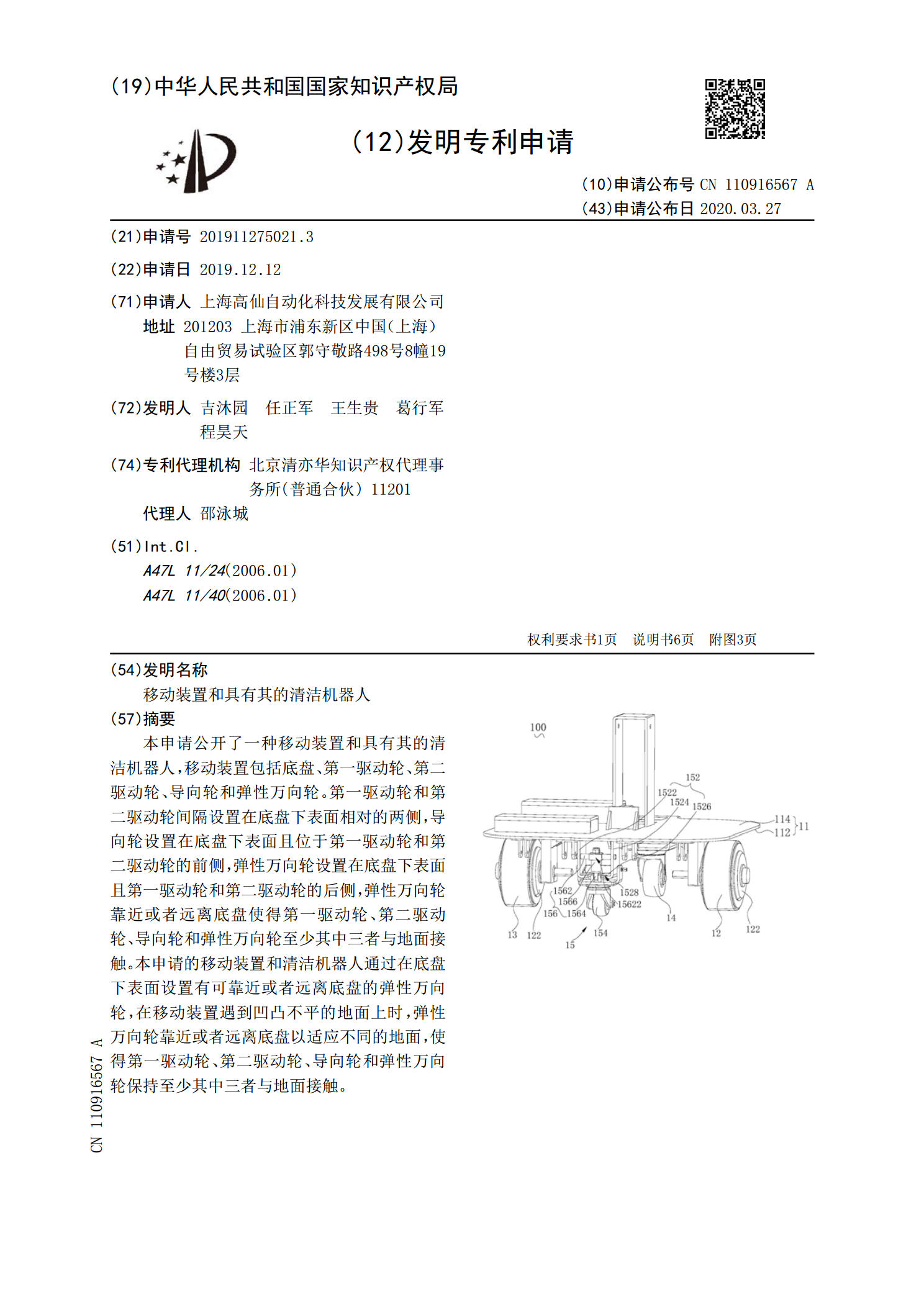
本申请公开了一种移动装置和具有其的清洁机器人,移动装置包括底盘、第一驱动轮、第二驱动轮、导向轮和弹性万向轮。第一驱动轮和第二驱动轮间隔设置在底盘下表面相对的两侧,导向轮设置在底盘下表面且位于第一驱动轮和第二驱动轮的前侧,弹性万向轮设置在底盘下表面且第一驱动轮和第二驱动轮的后侧,弹性万向轮靠近或者远离底盘使得第一驱动轮、第二驱动轮、导向轮和弹性万向轮至少其中三者与地面接触。本申请的移动装置和清洁机器人通过在底盘下表面设置有可靠近或者远离底盘的弹性万向轮,在移动装置遇到凹凸不平的地面上时,弹性万向轮靠近或者远

清洁设备的机身和具有其的清洁设备.pdf
本实用新型公开了一种清洁设备的机身和具有其的清洁设备,所述清洁设备的机身包括:壳体,所述壳体上设有排风口和接口;风机,所述风机设在所述壳体内且与所述排风口连通;污水箱,所述污水箱设在所述壳体内且分别与所述风机和所述接口连通,所述风机和所述污水箱沿水平方向排列。根据本实用新型实施例的清洁设备的机身具有放置稳定、不易倾倒等优点。
刚柔结合的抓手和具有其的机器人.pdf
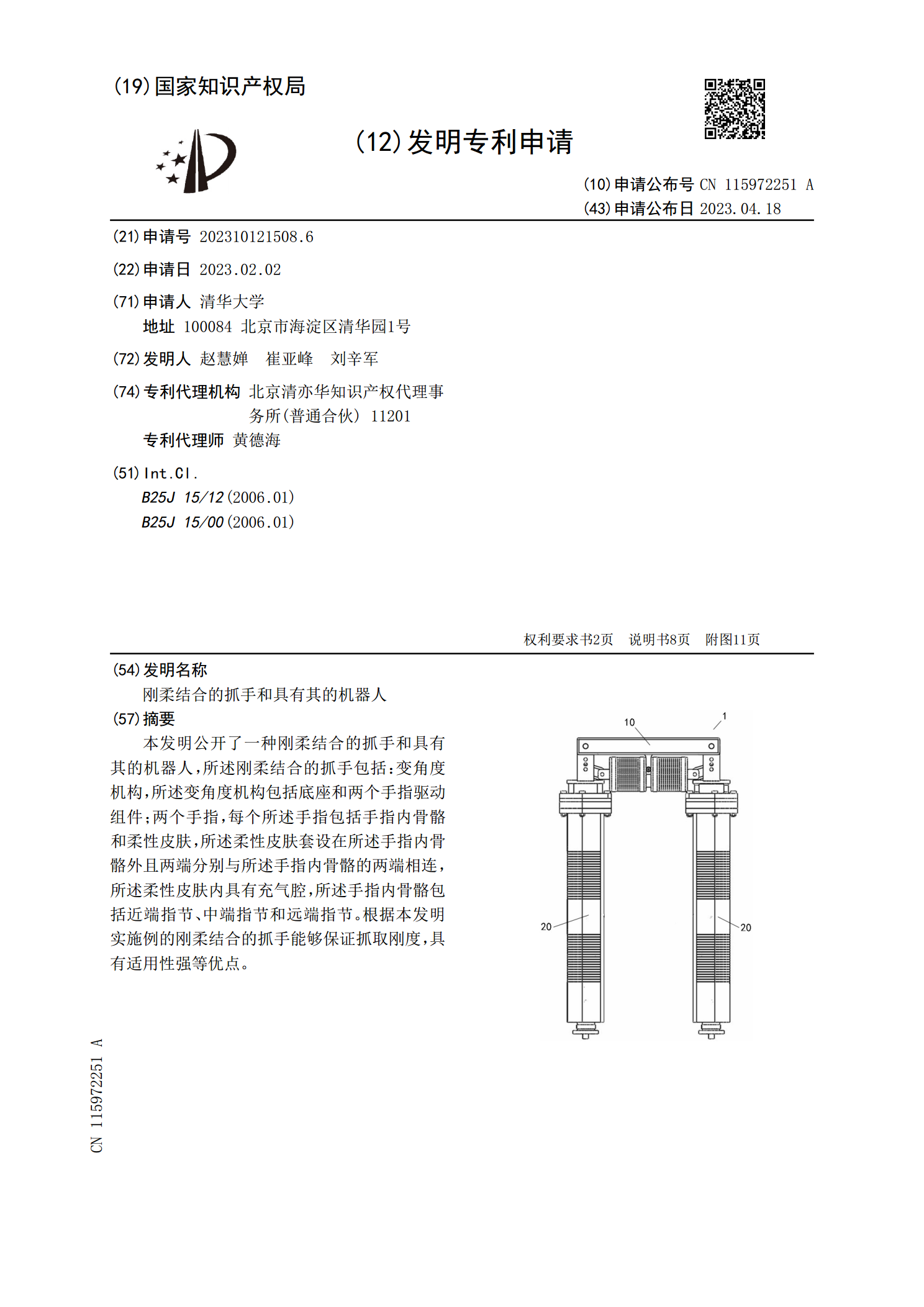
本发明公开了一种刚柔结合的抓手和具有其的机器人,所述刚柔结合的抓手包括:变角度机构,所述变角度机构包括底座和两个手指驱动组件;两个手指,每个所述手指包括手指内骨骼和柔性皮肤,所述柔性皮肤套设在所述手指内骨骼外且两端分别与所述手指内骨骼的两端相连,所述柔性皮肤内具有充气腔,所述手指内骨骼包括近端指节、中端指节和远端指节。根据本发明实施例的刚柔结合的抓手能够保证抓取刚度,具有适用性强等优点。

密封装置及具有其的设备和机器人.pdf
本申请公开了一种密封装置及具有其的设备和机器人,所述密封装置用于由金属制成的第一构件和第二构件之间并包括:第一密封组件,被配置为能够被密封连接到所述第一构件;和第二密封组件,被配置为能够被密封连接到所述第二构件,其中,所述第一密封组件和所述第二密封组件被配置为彼此形成至少一处沿所述第一构件和所述第二构件的周向的动态密封,其中,所述第一密封组件和所述第二密封组件的彼此接触的部分均由塑料制成。所述设备包括前述密封装置。所述机器人包括机械臂,所述机械臂至少包括第一连杆以及前述密封装置,其中,所述第一构件是所述第
夹具及具有其的机器人.pdf
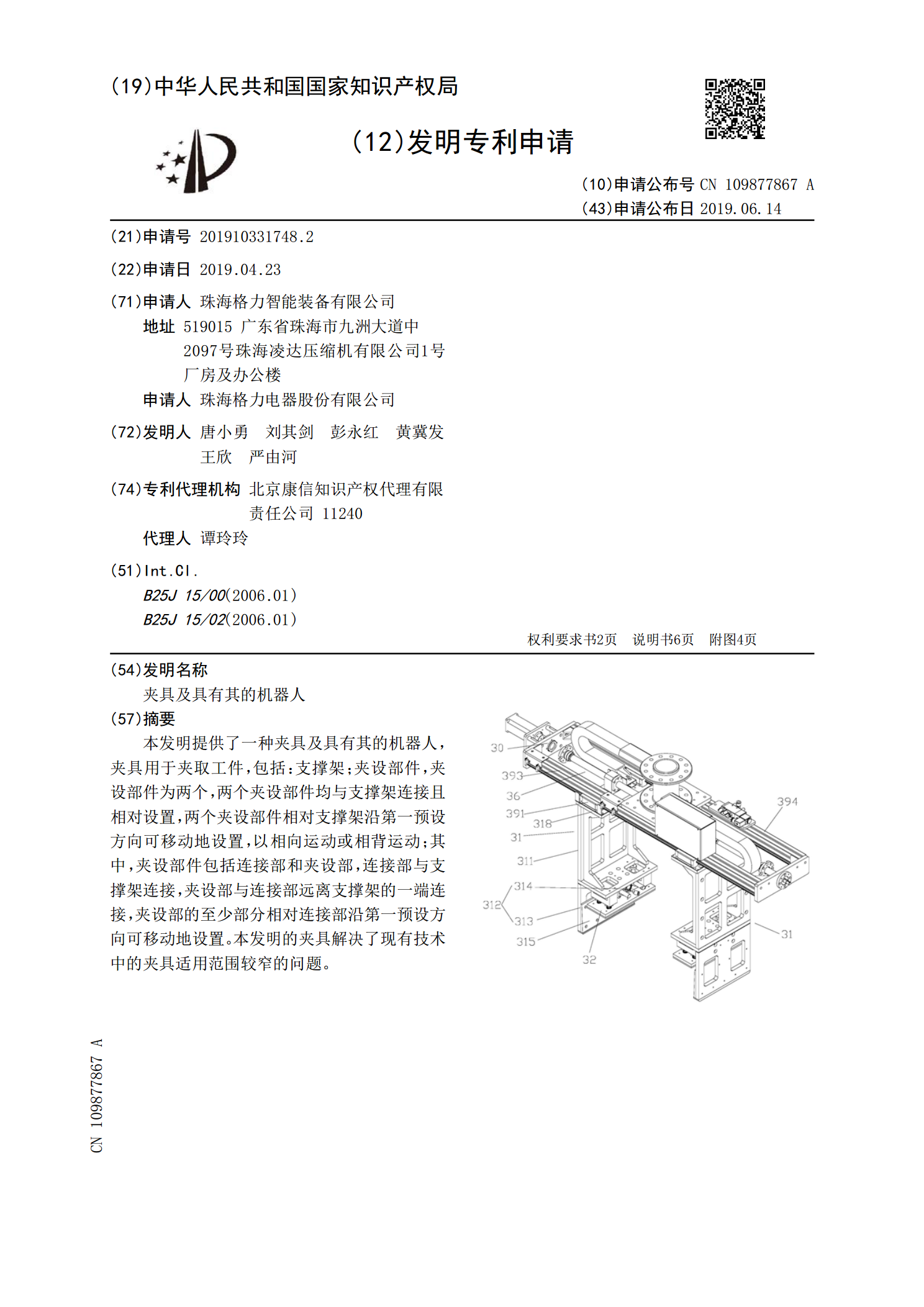
本发明提供了一种夹具及具有其的机器人,夹具用于夹取工件,包括:支撑架;夹设部件,夹设部件为两个,两个夹设部件均与支撑架连接且相对设置,两个夹设部件相对支撑架沿第一预设方向可移动地设置,以相向运动或相背运动;其中,夹设部件包括连接部和夹设部,连接部与支撑架连接,夹设部与连接部远离支撑架的一端连接,夹设部的至少部分相对连接部沿第一预设方向可移动地设置。本发明的夹具解决了现有技术中的夹具适用范围较窄的问题。