
一种足底驱动步行训练助行器.pdf

Do****76


1/10
2/10

3/10

4/10

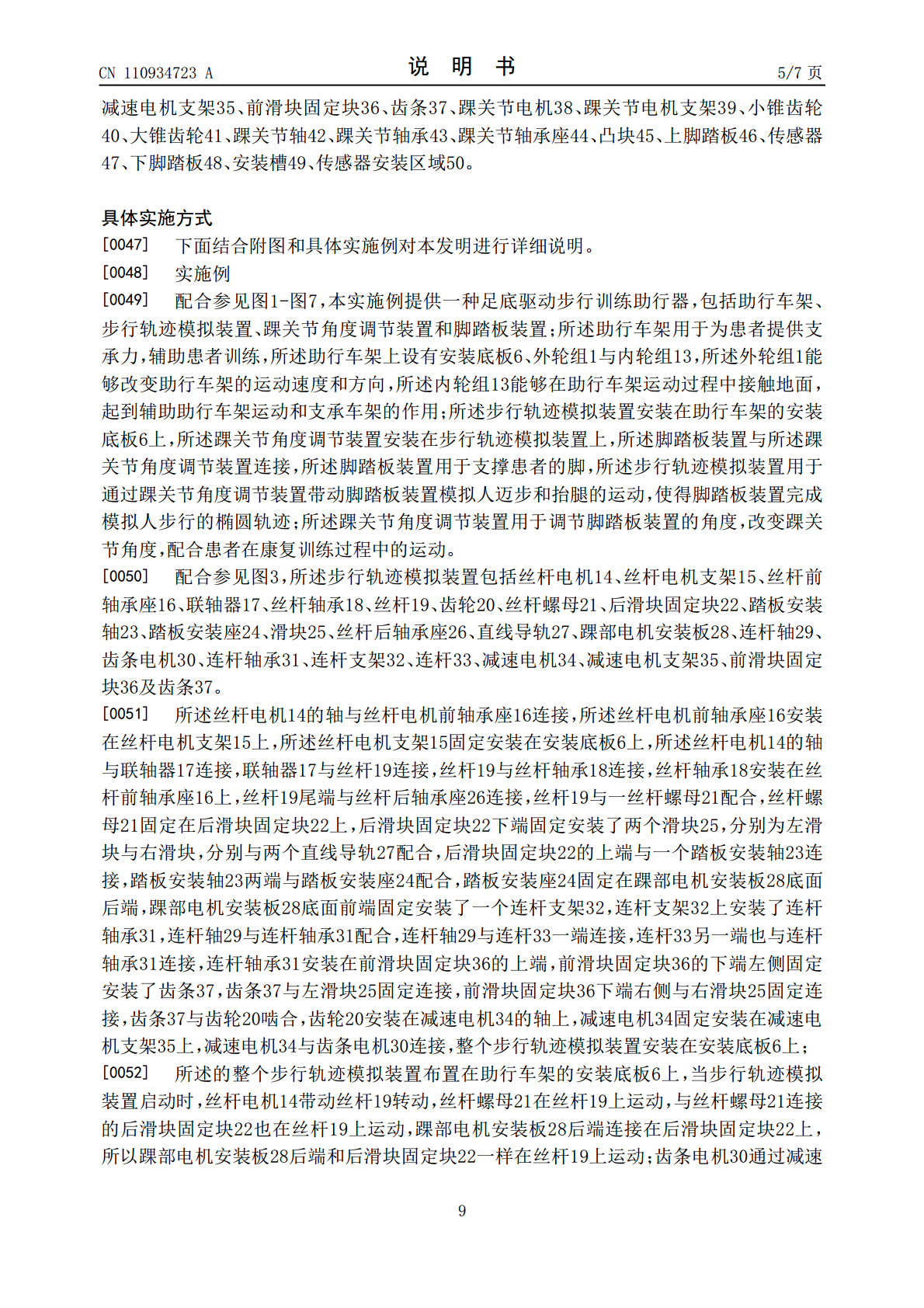
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种足底驱动步行训练助行器.pdf
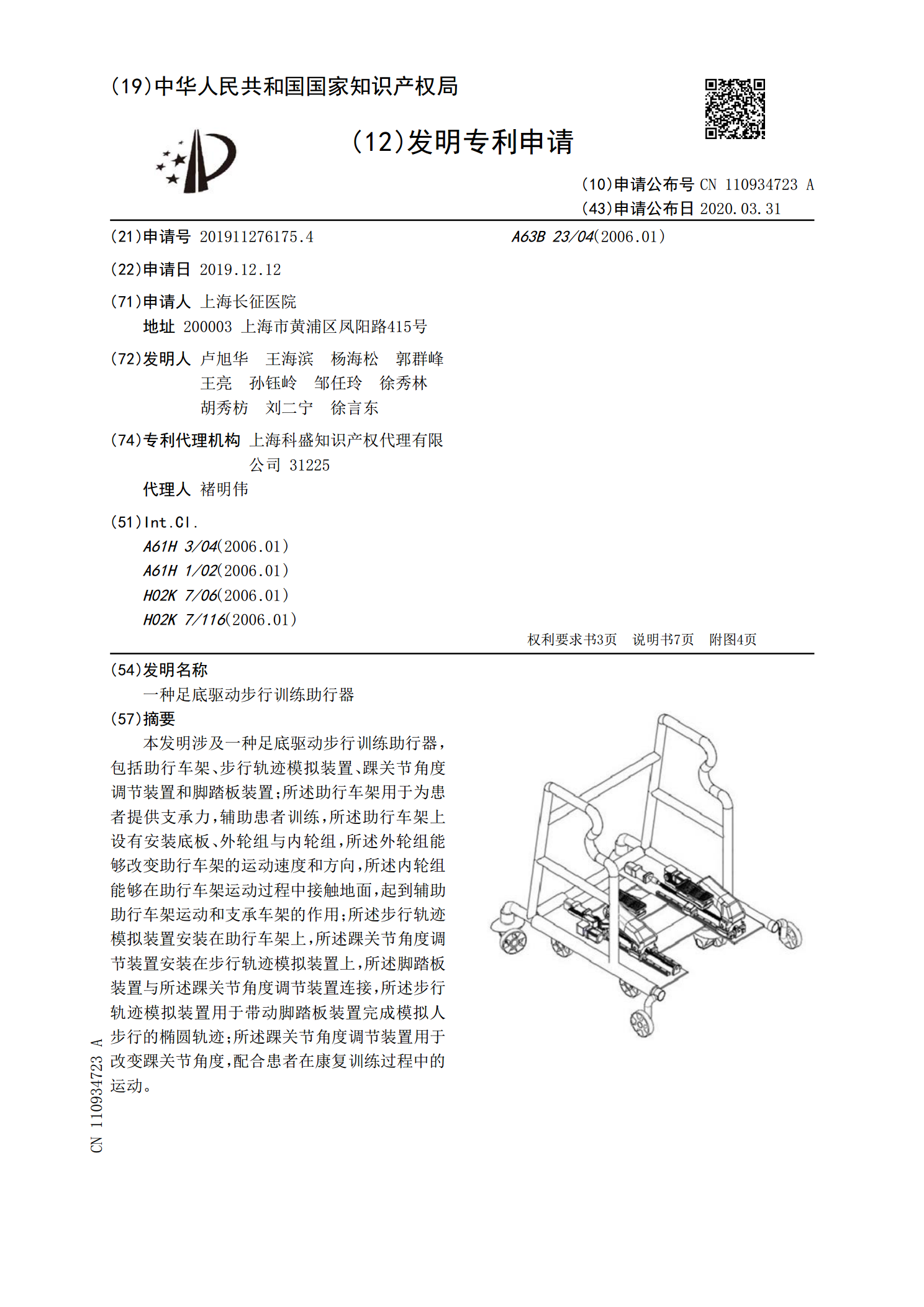
本发明涉及一种足底驱动步行训练助行器,包括助行车架、步行轨迹模拟装置、踝关节角度调节装置和脚踏板装置;所述助行车架用于为患者提供支承力,辅助患者训练,所述助行车架上设有安装底板、外轮组与内轮组,所述外轮组能够改变助行车架的运动速度和方向,所述内轮组能够在助行车架运动过程中接触地面,起到辅助助行车架运动和支承车架的作用;所述步行轨迹模拟装置安装在助行车架上,所述踝关节角度调节装置安装在步行轨迹模拟装置上,所述脚踏板装置与所述踝关节角度调节装置连接,所述步行轨迹模拟装置用于带动脚踏板装置完成模拟人步行的椭圆轨

足底驱动截瘫助行的仿真研究.docx
足底驱动截瘫助行的仿真研究足底驱动截瘫助行的仿真研究摘要:近年来,随着科技的飞速发展,应用于医疗领域的仿真技术也得到了快速的发展。截瘫助行是一种重要的康复治疗方式,能够有效提高截瘫患者的生活质量。本文针对截瘫助行中常见的足底驱动装置进行了仿真研究,通过建立仿真模型,研究了足底驱动在截瘫助行中的运动学和动力学特性。结果表明,足底驱动能够可靠稳定地提供助行动力,对截瘫患者的康复治疗具有重要意义。关键词:仿真技术;截瘫助行;足底驱动;运动学;动力学一、引言截瘫是一种导致下肢功能障碍的严重疾病,给患者的生活带来了

足底轮式驱动的截瘫助行外骨骼.pdf
一种足底轮式驱动的截瘫助行外骨骼,包括下肢支具、足底驱动模块和电源及控制电路,其中下肢支具用于支撑和固定使用者下肢;足底驱动模块包括由动力推动使得使用者前行的轮子;电源及控制电路包括电源模块、驱动装置和信号收发装置。通过本发明的足底轮式驱动的截瘫助行外骨骼,无需考虑肢体关节力线,且不采用复杂机电控制方案以协同各关节运动,只需控制足底电机就可以实现行走、可降低设备复杂性、令外骨骼在结构上更加轻便,使得截瘫助行外骨骼的成本更低。
一种动力驱动的助行器.pdf
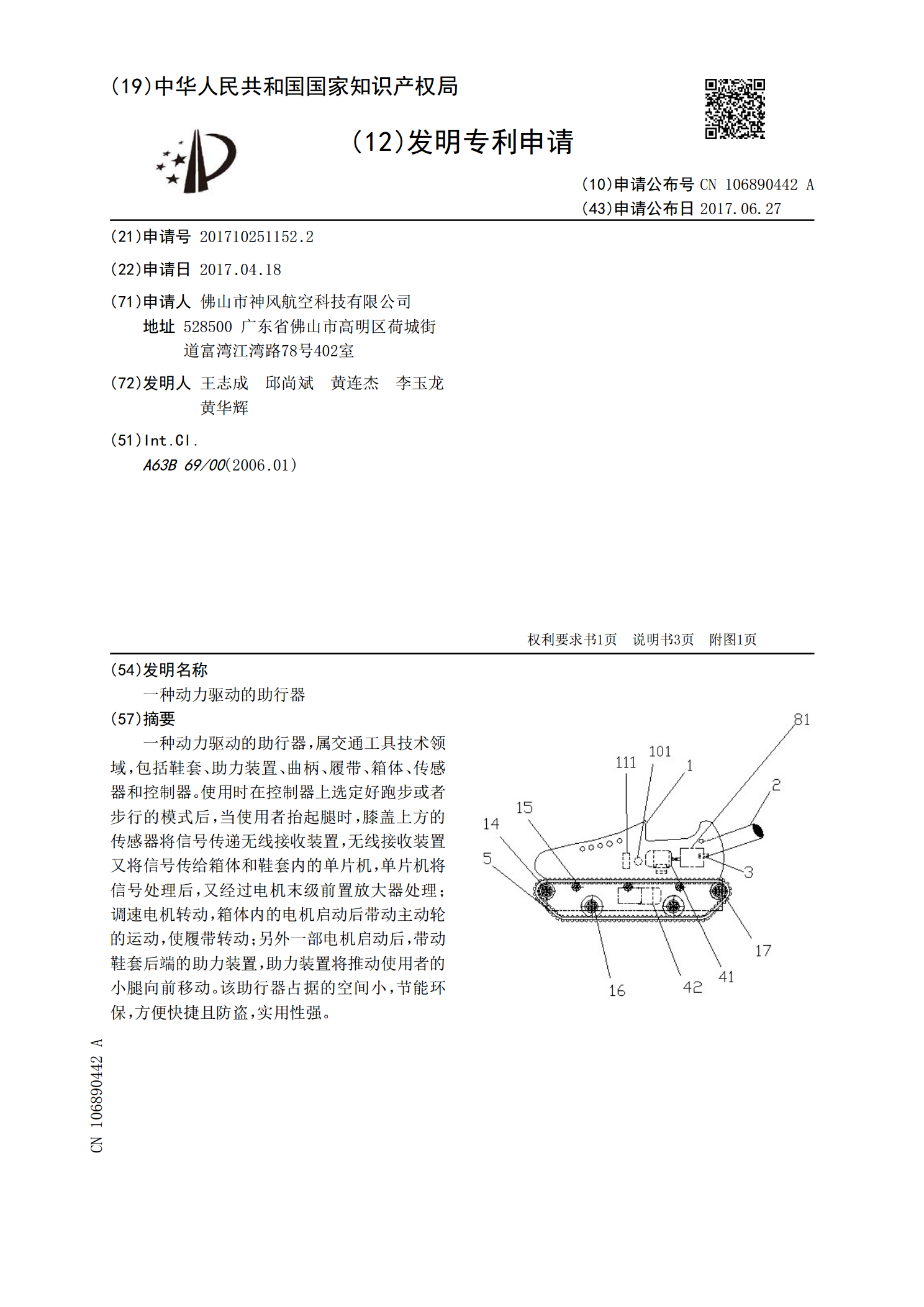
一种动力驱动的助行器,属交通工具技术领域,包括鞋套、助力装置、曲柄、履带、箱体、传感器和控制器。使用时在控制器上选定好跑步或者步行的模式后,当使用者抬起腿时,膝盖上方的传感器将信号传递无线接收装置,无线接收装置又将信号传给箱体和鞋套内的单片机,单片机将信号处理后,又经过电机末级前置放大器处理;调速电机转动,箱体内的电机启动后带动主动轮的运动,使履带转动;另外一部电机启动后,带动鞋套后端的助力装置,助力装置将推动使用者的小腿向前移动。该助行器占据的空间小,节能环保,方便快捷且防盗,实用性强。

步行辅助器助行器专家讲座.pptx
第五章步行辅助器第一节概述【分类】b:助行架(轻型步行式、轮式)2、功效性电刺激助行器3、动力式助行器【作用】分担体重,减轻下肢关节应力负荷,保护伤痛关节扩大下肢支撑面积,维持平衡确保步行安全增强肌力和耐力,对上肢伸肌及相关肌肉含有增强肌力作用和增强全身耐力作用【影响助行器稳定性原因】影响步行辅助器选取原因第二节助行杖1、手杖(stick/cane)多脚手杖(三角、四角)优点:易于携带、上下楼梯方便等缺点:稳定性比单脚手杖好但比臂杖差适合用于平衡能力欠佳,用单脚手杖不安全者臂杖分类前臂支持型(臂套位于肘关