
一种夹持式履带爬行机构.pdf

宜然****找我

1/9
2/9
3/9
4/9

5/9
6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种夹持式履带爬行机构.pdf
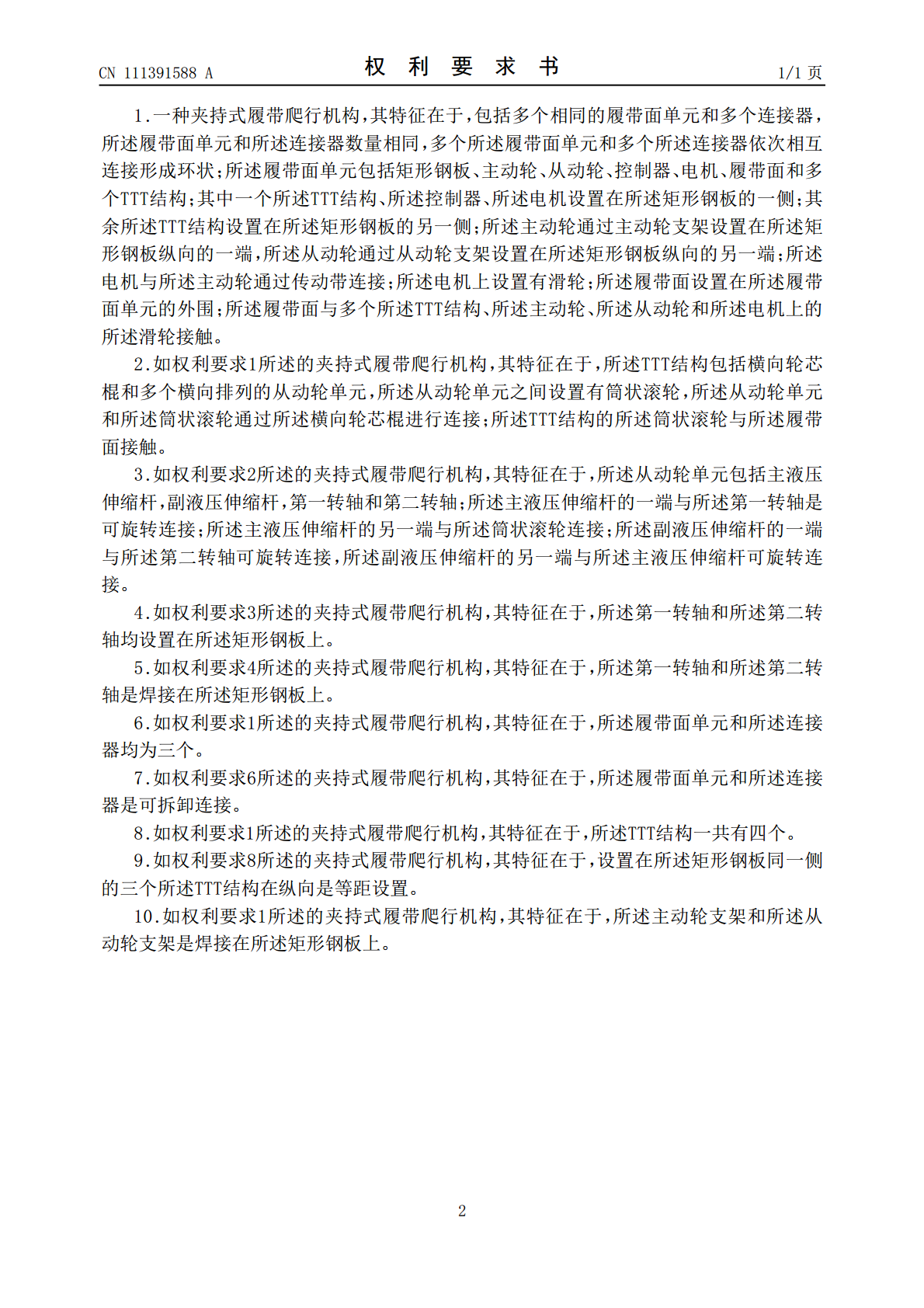
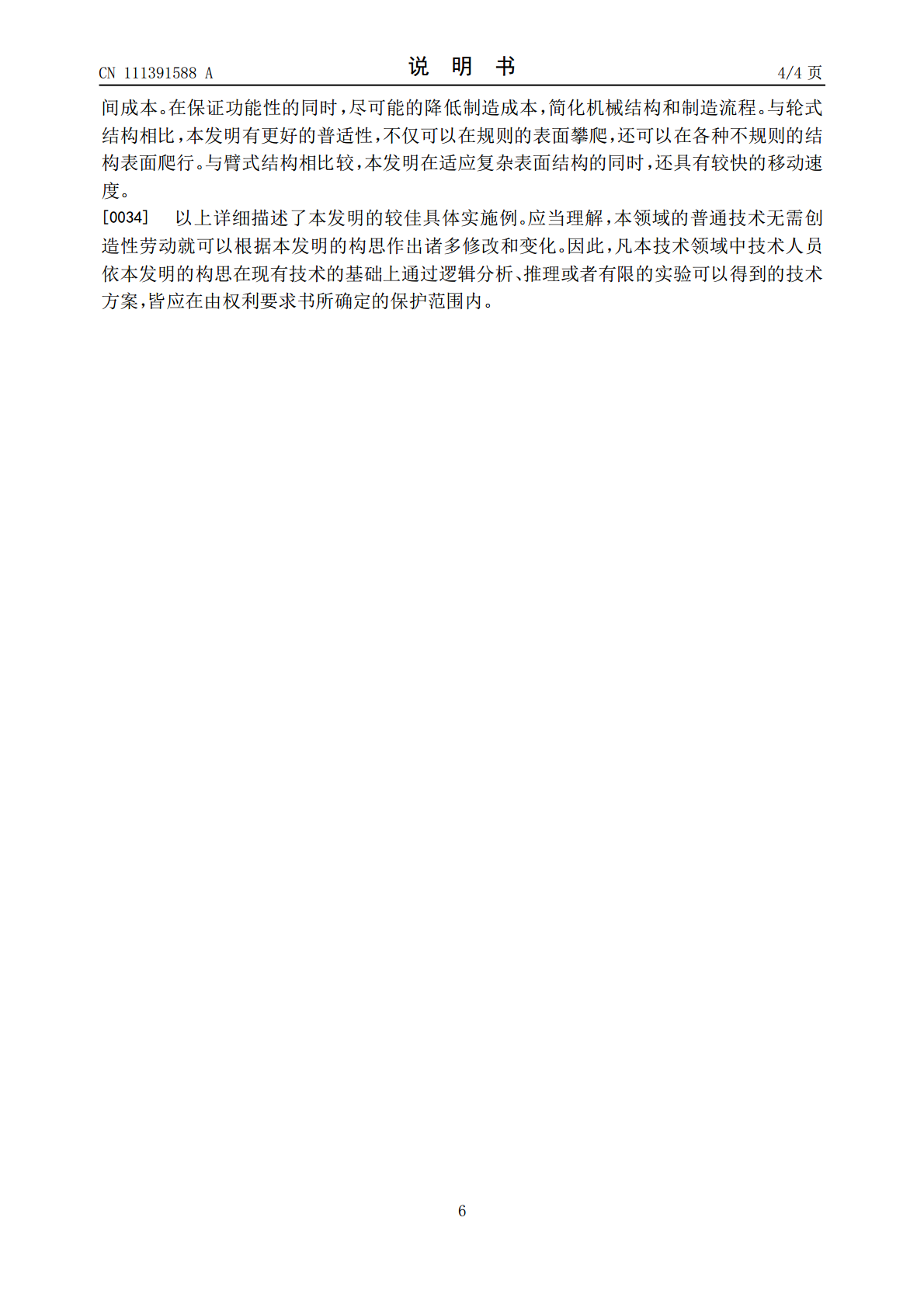
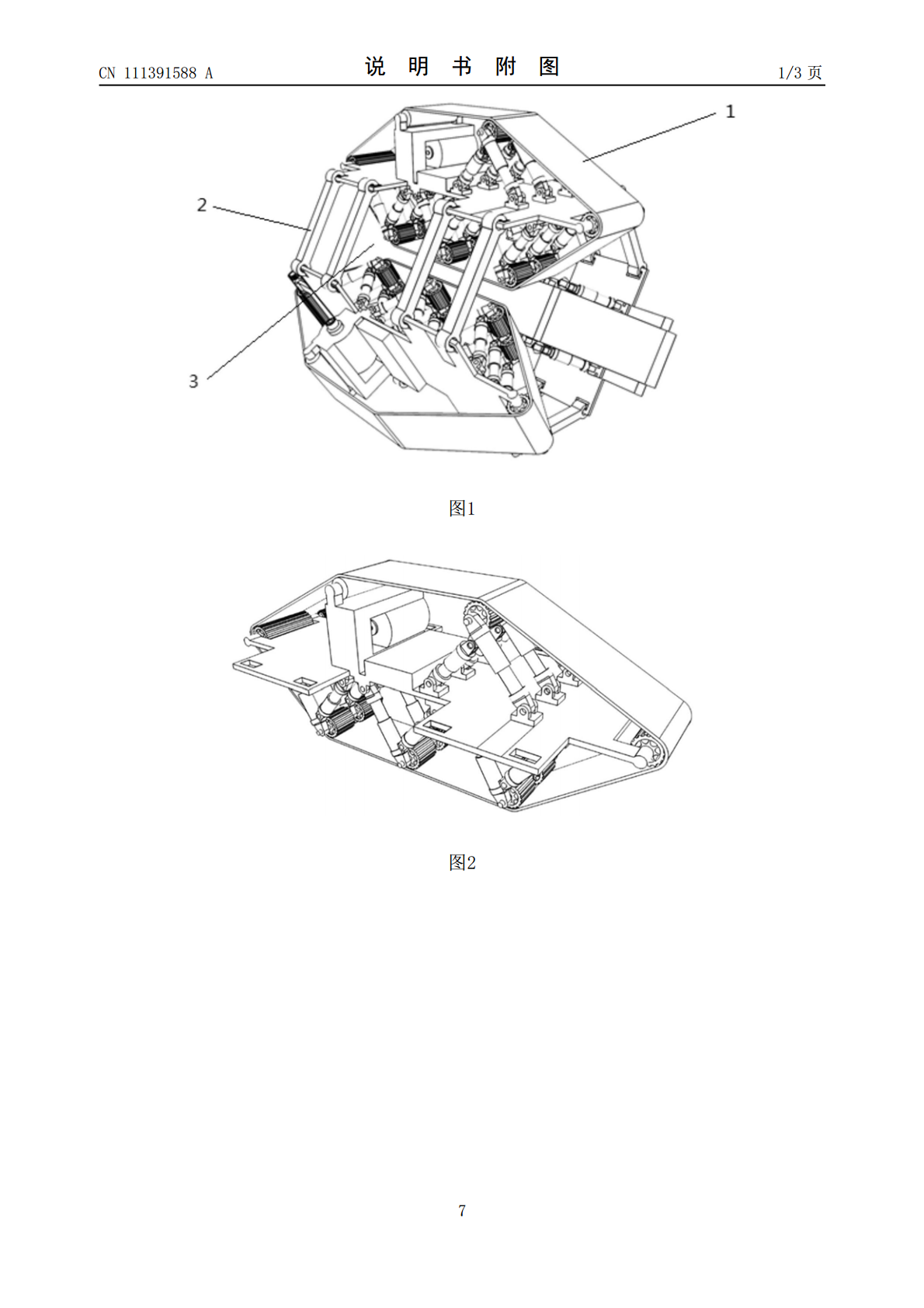
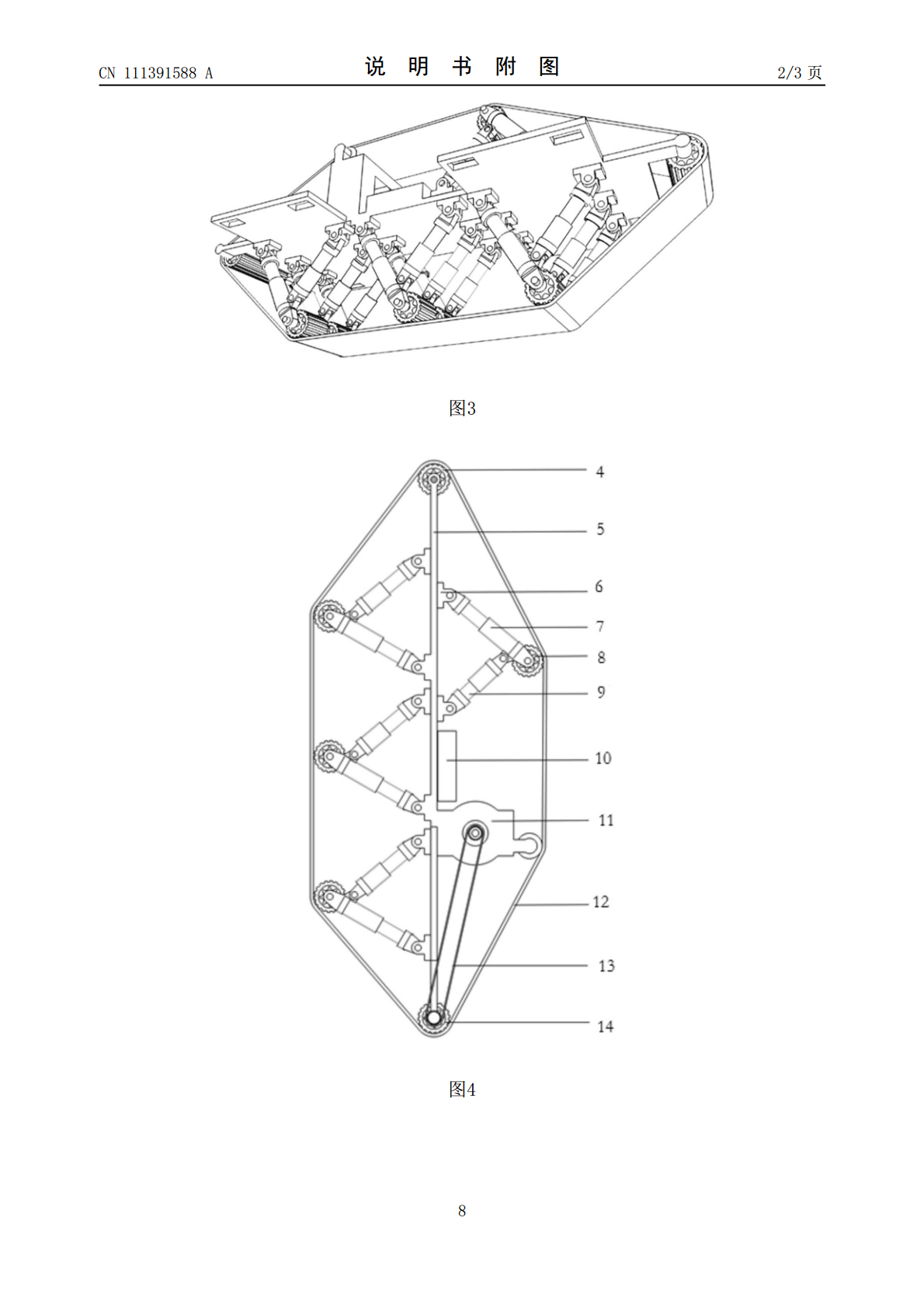
本发明公开了一种夹持式履带爬行机构,涉及海洋工程装备领域,包括多个相同的履带面单元和多个连接器,多个履带面单元和多个连接器依次相互连接形成环状;履带面单元包括矩形钢板、主动轮、从动轮、控制器、电机、履带面和多个TTT结构;其中一个TTT结构、控制器、电机设置在矩形钢板的一侧;其余TTT结构设置在矩形钢板的另一侧;主动轮通过主动轮支架设置在矩形钢板纵向的一端,从动轮通过从动轮支架设置在矩形钢板纵向的另一端;电机与主动轮通过传动带连接;电机上设置有滑轮;履带面设置在履带面单元的外围;履带面与多个TTT结构、主
一种履带夹持传送机构.pdf
本发明公开了一种履带夹持传送机构,包括底座,所述底座顶端设置有下传送带,所述底座上方设置有机架,所述机架底端设置有安装板,所述安装板底端设置有上传送带,所述上传送带和下传送带均与外界的第一电机传动连接,所述安装板顶端转动连接有螺杆,所述螺杆的顶端贯穿机架后,固定安装有手轮,所述机架表面开设有与螺杆相对应的螺纹孔,所述安装板底端和底座顶端均安装有负离子发生器,本发明通过静电吸附和履带本身的摩擦力来运输物料,不需要过大的压力就实现了运输功能,避免压力对物料造成挤压变形等损伤,节省人力,降低人工成本,且清洁方便

夹持式爬行导轨轮.pdf
夹持式爬行导轨轮属于轨道电梯系统的配套工程技术领域。包括齿轮基座、压覆轮基座、主动轴、主动齿轮、压覆轮,其特征是:齿轮基座的轴孔中装配主动轴,主动轴的一端固定主动齿轮,主动齿轮与齿条电梯轨道的齿条轨啮合,主动轴另一端连接动力电机;压覆轮基座装配一个或多个压覆轮,压覆轮与齿条电梯轨道的长条轨啮合;齿轮基座和压覆轮基座通过装配孔利用紧固件固定在一起,利用固定孔固定在电梯轿厢一侧;主动齿轮和压覆轮紧紧地夹持在齿条电梯轨道的两侧。该发明可以紧紧地夹持在齿条电梯轨道上,利用动力电机提供的动力驱动主动齿轮,带动电梯轿

履带式永磁爬行机.pdf
本发明公开了一种履带式永磁爬行机,包括车体、履带、驱动装置、及连接轴,车体两侧设有主动链轮和从动链轮,主动链轮由驱动装置驱动而转动,从动链轮转动设在连接轴上,主动链轮和从动链轮通过履带传动连接,车体内侧板下端设置有可吸附在磁性工件上磁悬浮构件。所述的履带包括依次排列的永磁铁装置和连接片,永磁铁装置之间通过连接片相互咬合铰接而成封闭环状,在永磁铁装置内外两侧且位于永磁铁装置与连接片铰接处分别设有可转动的中间滚轮,中间滚轮在履带传动时可沿主动链轮和从动链轮的齿形轮廓面滚动。本发明解决了现有爬行机存在的难以准确
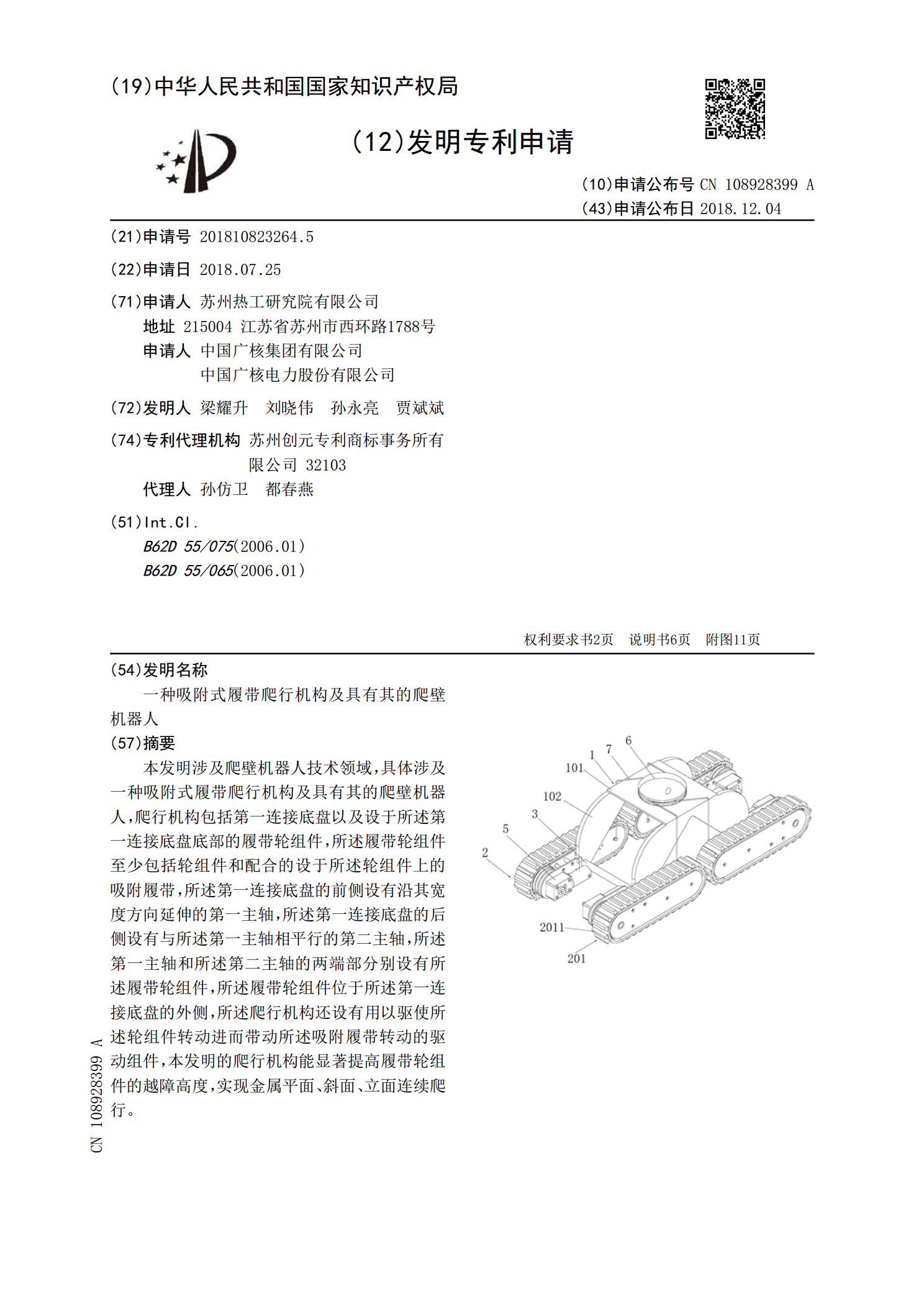
一种吸附式履带爬行机构及具有其的爬壁机器人.pdf
本发明涉及爬壁机器人技术领域,具体涉及一种吸附式履带爬行机构及具有其的爬壁机器人,爬行机构包括第一连接底盘以及设于所述第一连接底盘底部的履带轮组件,所述履带轮组件至少包括轮组件和配合的设于所述轮组件上的吸附履带,所述第一连接底盘的前侧设有沿其宽度方向延伸的第一主轴,所述第一连接底盘的后侧设有与所述第一主轴相平行的第二主轴,所述第一主轴和所述第二主轴的两端部分别设有所述履带轮组件,所述履带轮组件位于所述第一连接底盘的外侧,所述爬行机构还设有用以驱使所述轮组件转动进而带动所述吸附履带转动的驱动组件,本发明的爬