
一种管道爬行机器人.pdf

盼易****君a


1/7
2/7
3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种管道爬行机器人及其爬行方法.pdf
本发明公开一种管道爬行机器人及其爬行方法,所述管道机器人包括四个结构相同且依次首尾相连的伸缩机构,所述伸缩机构包括:上支撑板、下支撑板、第一支撑连杆、第二支撑连杆、支撑台、箱体、第一电动机、第二电动机、第一偏心轮和第二偏心轮;本发明通过控制模块对两个电动机进行同步控制,从而驱使伸缩机构收缩或拉伸,并通过四个伸缩机构的相互配合,使管道机器人能够在管道内爬行运动;通过控制模块对两个电动机进行差动控制,从而驱使伸缩机构的两个偏心轮转动角度不同,使伸缩机构朝管道转弯方向转弯,本发明的机器人能适应复杂的管道内部环境
一种管道爬行机器人.pdf
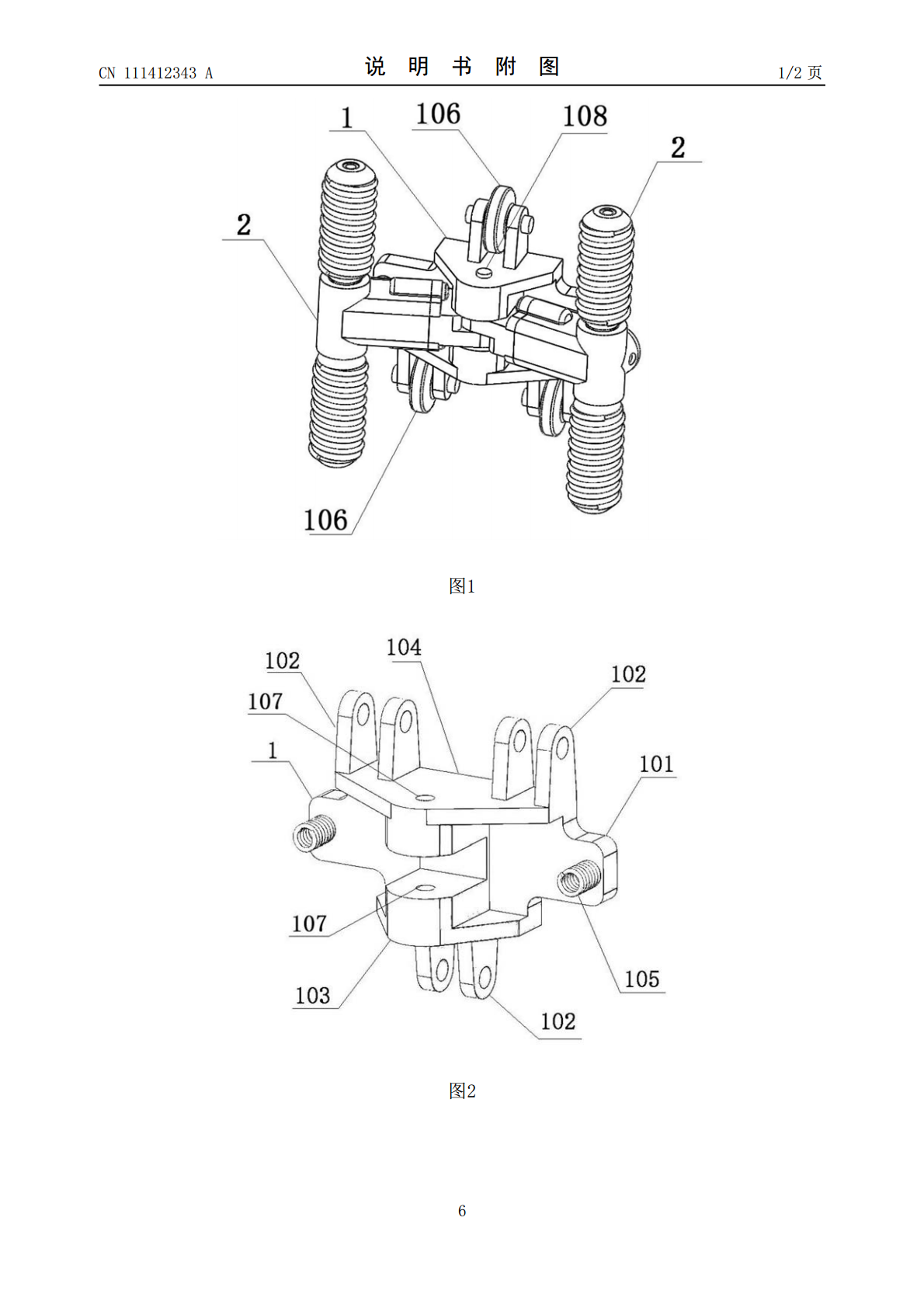
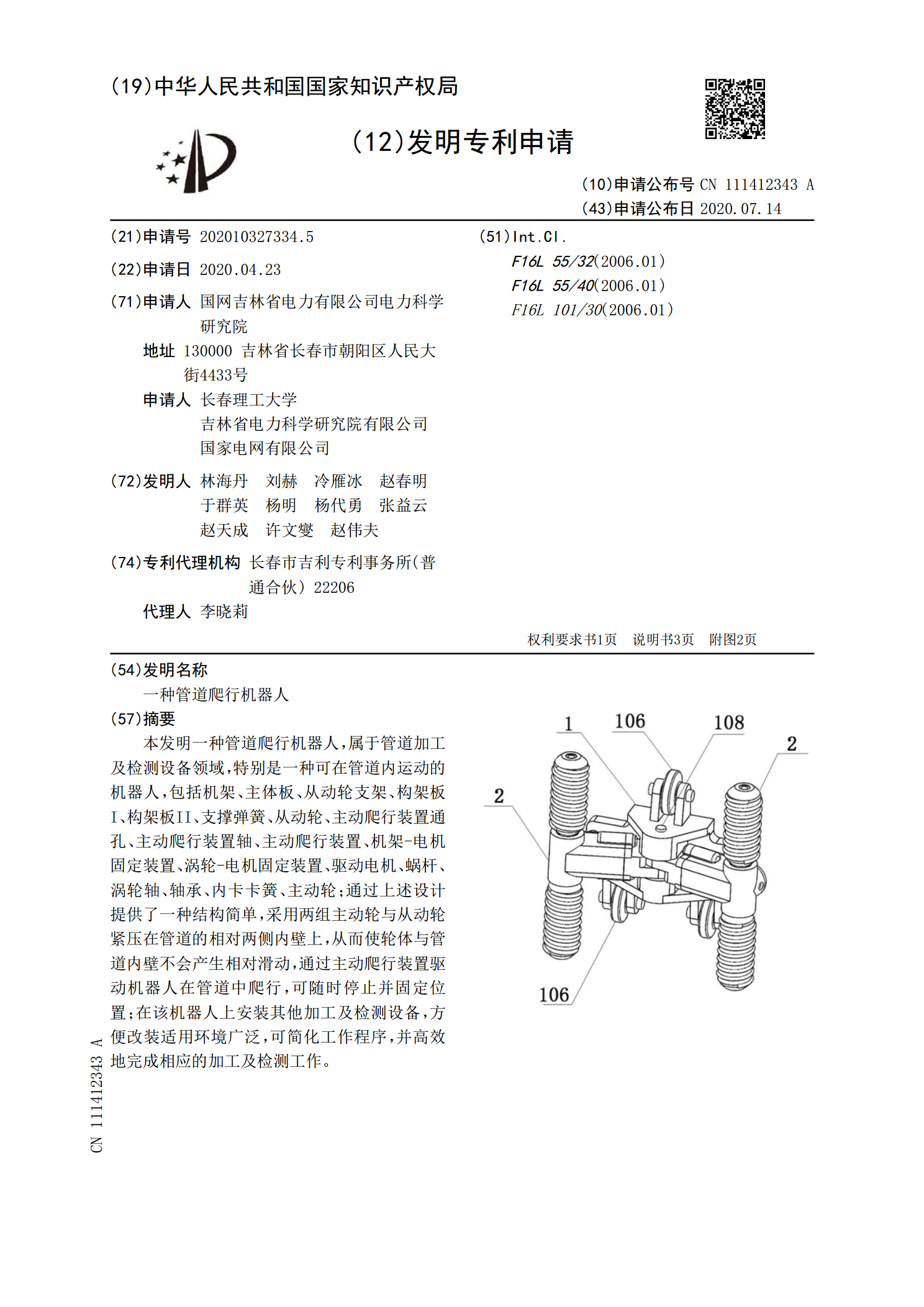
本发明一种管道爬行机器人,属于管道加工及检测设备领域,特别是一种可在管道内运动的机器人,包括机架、主体板、从动轮支架、构架板I、构架板II、支撑弹簧、从动轮、主动爬行装置通孔、主动爬行装置轴、主动爬行装置、机架‑电机固定装置、涡轮‑电机固定装置、驱动电机、蜗杆、涡轮轴、轴承、内卡卡簧、主动轮;通过上述设计提供了一种结构简单,采用两组主动轮与从动轮紧压在管道的相对两侧内壁上,从而使轮体与管道内壁不会产生相对滑动,通过主动爬行装置驱动机器人在管道中爬行,可随时停止并固定位置;在该机器人上安装其他加工及检测设备

一种管道爬行机器人.pdf
本发明涉及一种管道爬行机器人,包括扁平的机身(100)、对称连接在所述机身(100)两侧的六只足(200),每只足(200)包括:与所述机身(100)固定连接的第一节(210)、通过第一连接装置(240)与所述第一节(210)可转动连接的第二节(220)、通过第二连接装置(250)与所述第二节(220)可转动连接的第三节(230)。本发明的管道爬行机器人具有合理的六足结构设计,配合不同的步态允许机器人通过止回阀、蝶阀等障碍物,实现在复杂管道的自由行走功能,可以通过拐弯的弯道;扁平的机身上预留下了大量的空间
一种管道爬行机器人.pdf
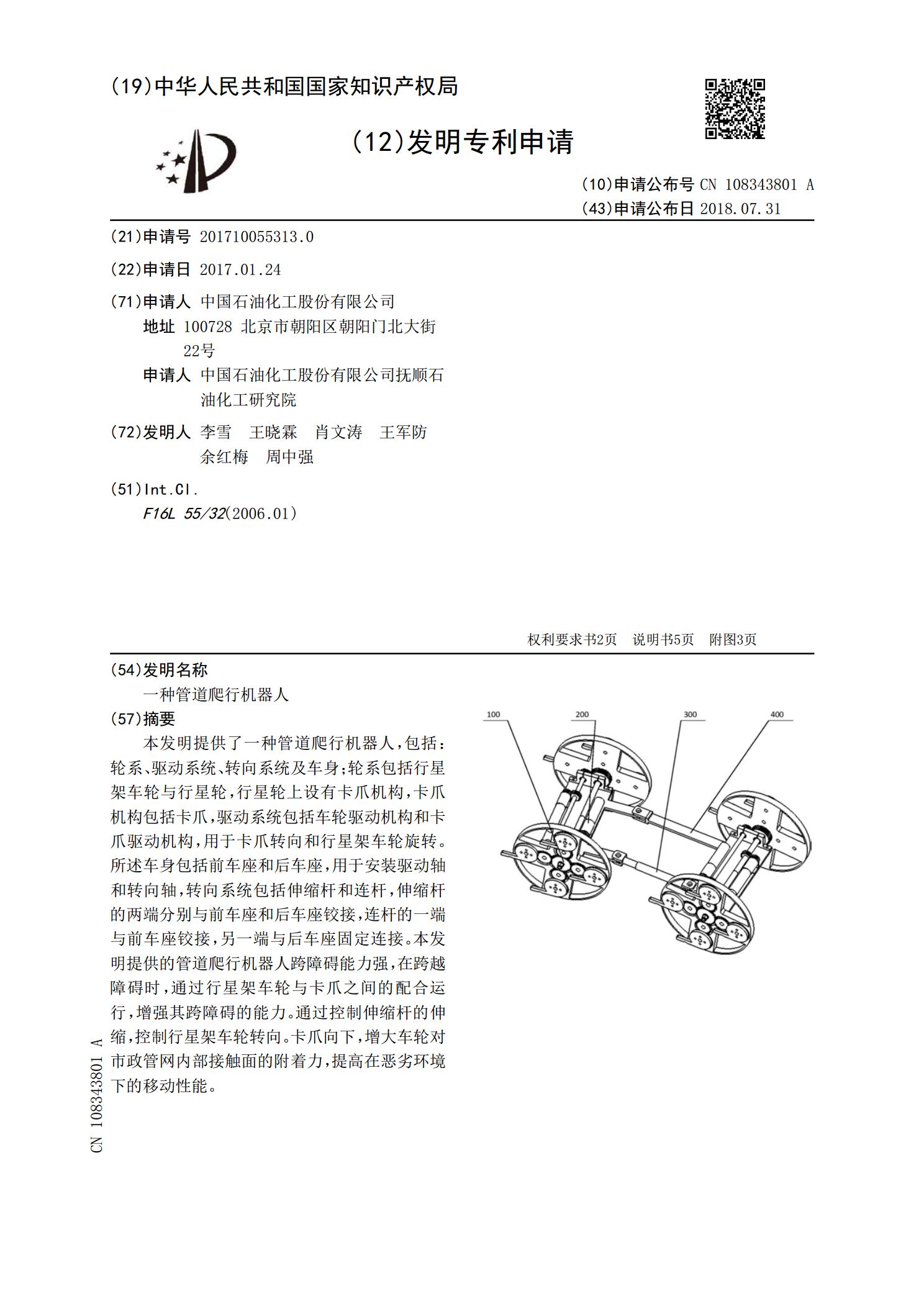
本发明提供了一种管道爬行机器人,包括:轮系、驱动系统、转向系统及车身;轮系包括行星架车轮与行星轮,行星轮上设有卡爪机构,卡爪机构包括卡爪,驱动系统包括车轮驱动机构和卡爪驱动机构,用于卡爪转向和行星架车轮旋转。所述车身包括前车座和后车座,用于安装驱动轴和转向轴,转向系统包括伸缩杆和连杆,伸缩杆的两端分别与前车座和后车座铰接,连杆的一端与前车座铰接,另一端与后车座固定连接。本发明提供的管道爬行机器人跨障碍能力强,在跨越障碍时,通过行星架车轮与卡爪之间的配合运行,增强其跨障碍的能力。通过控制伸缩杆的伸缩,控制行
一种智能管道爬行机器人.pdf
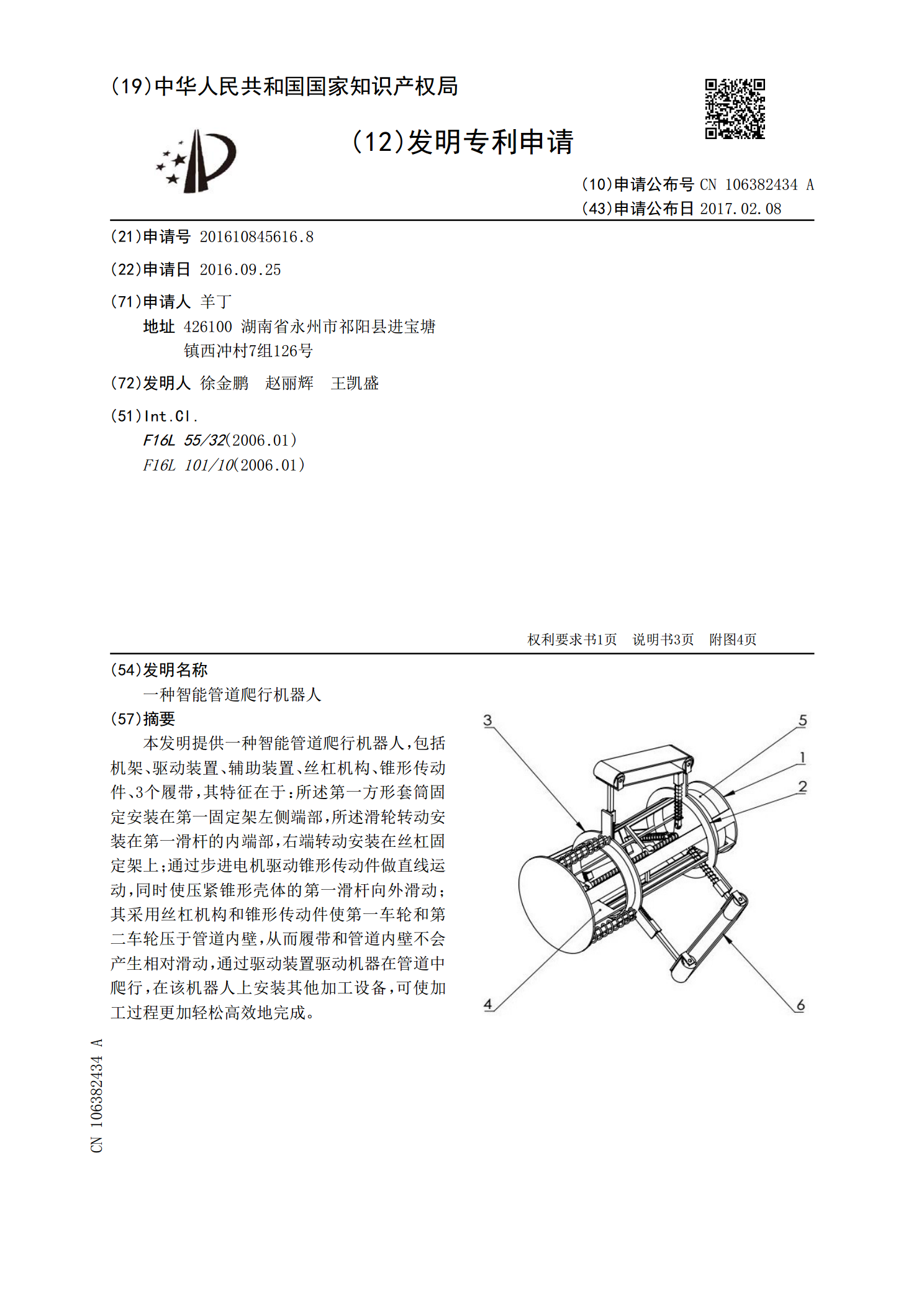
本发明提供一种智能管道爬行机器人,包括机架、驱动装置、辅助装置、丝杠机构、锥形传动件、3个履带,其特征在于:所述第一方形套筒固定安装在第一固定架左侧端部,所述滑轮转动安装在第一滑杆的内端部,右端转动安装在丝杠固定架上;通过步进电机驱动锥形传动件做直线运动,同时使压紧锥形壳体的第一滑杆向外滑动;其采用丝杠机构和锥形传动件使第一车轮和第二车轮压于管道内壁,从而履带和管道内壁不会产生相对滑动,通过驱动装置驱动机器在管道中爬行,在该机器人上安装其他加工设备,可使加工过程更加轻松高效地完成。