
一种机器人快换手指结构.pdf

醉香****mm

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人快换手指结构.pdf
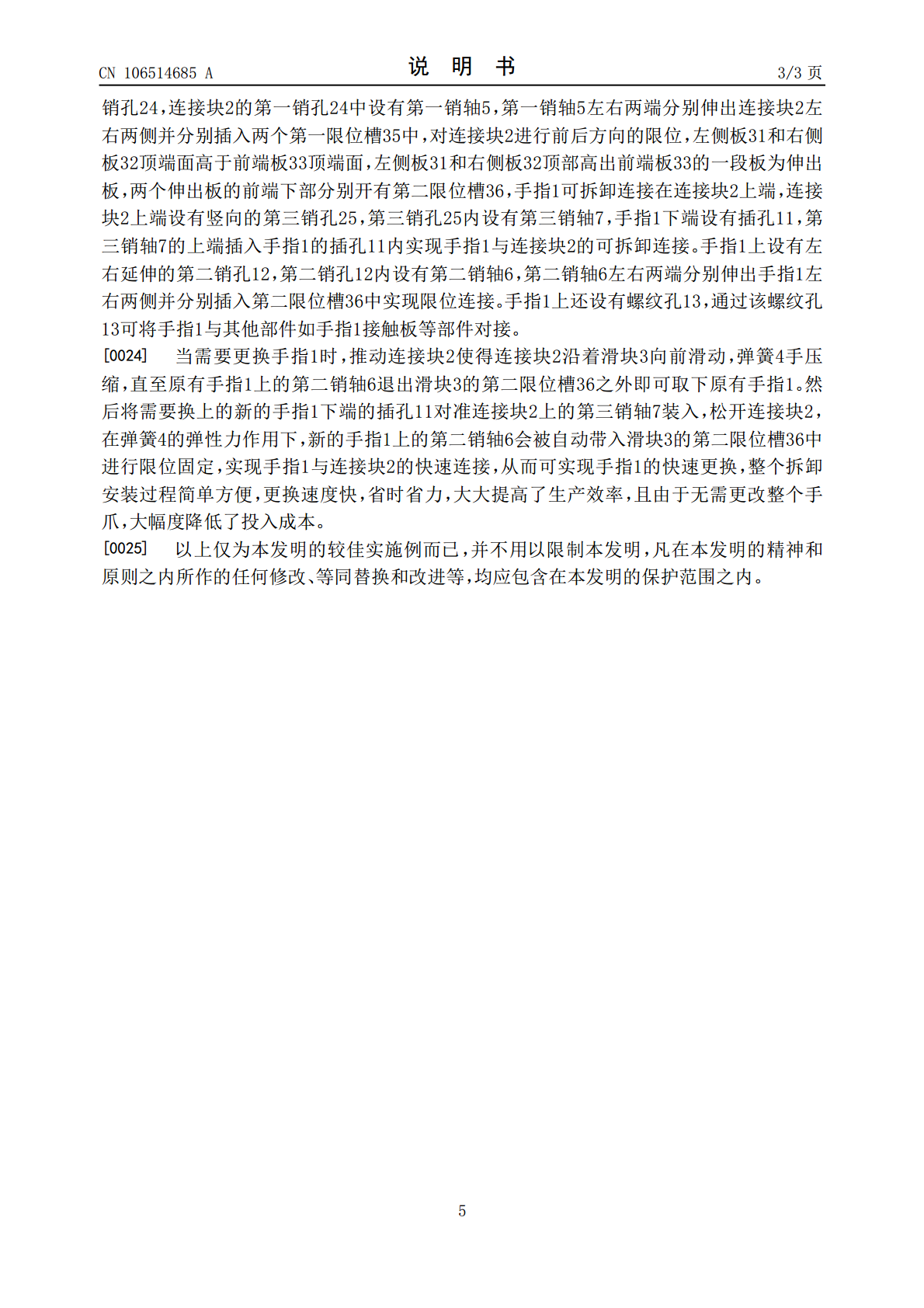
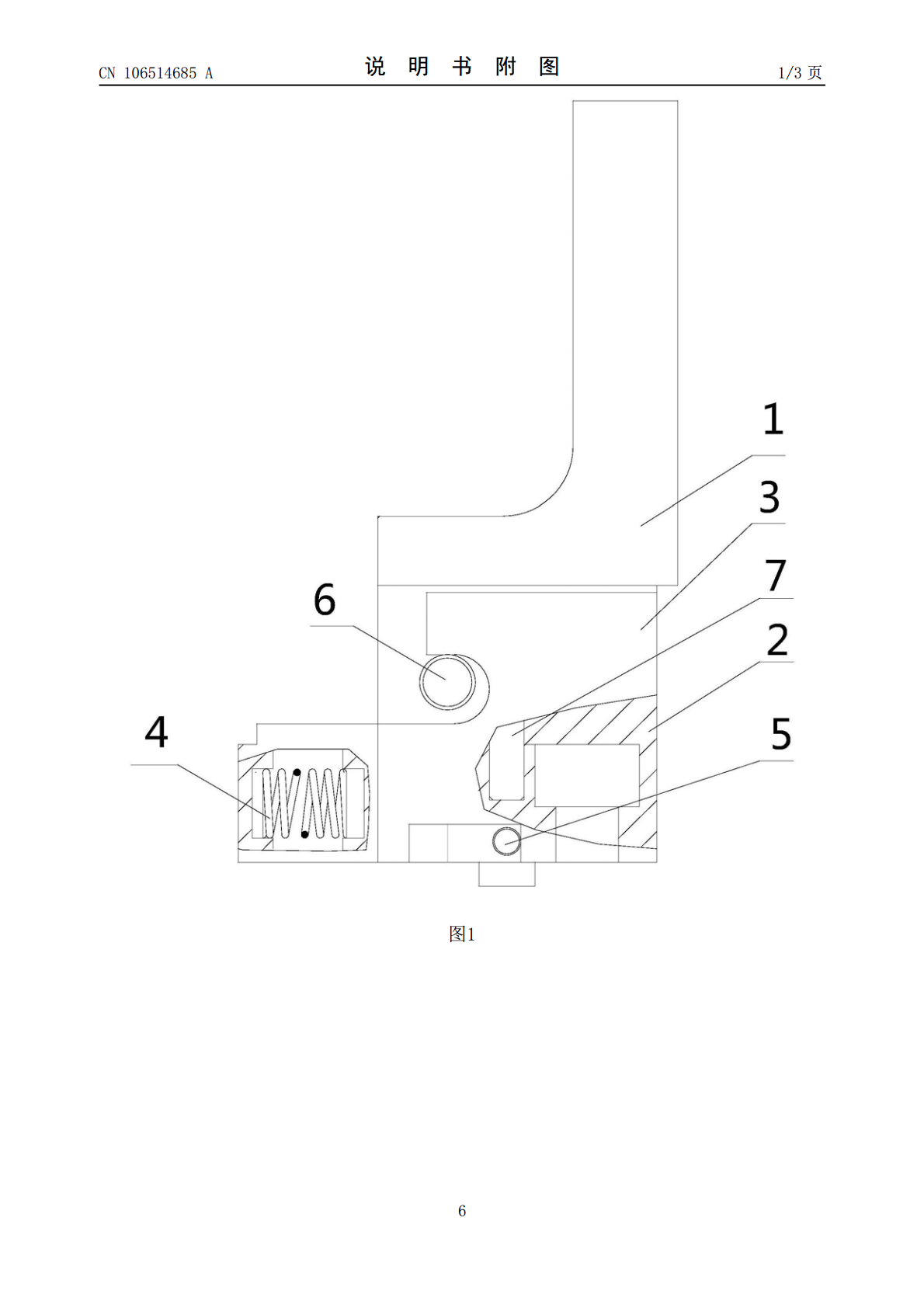
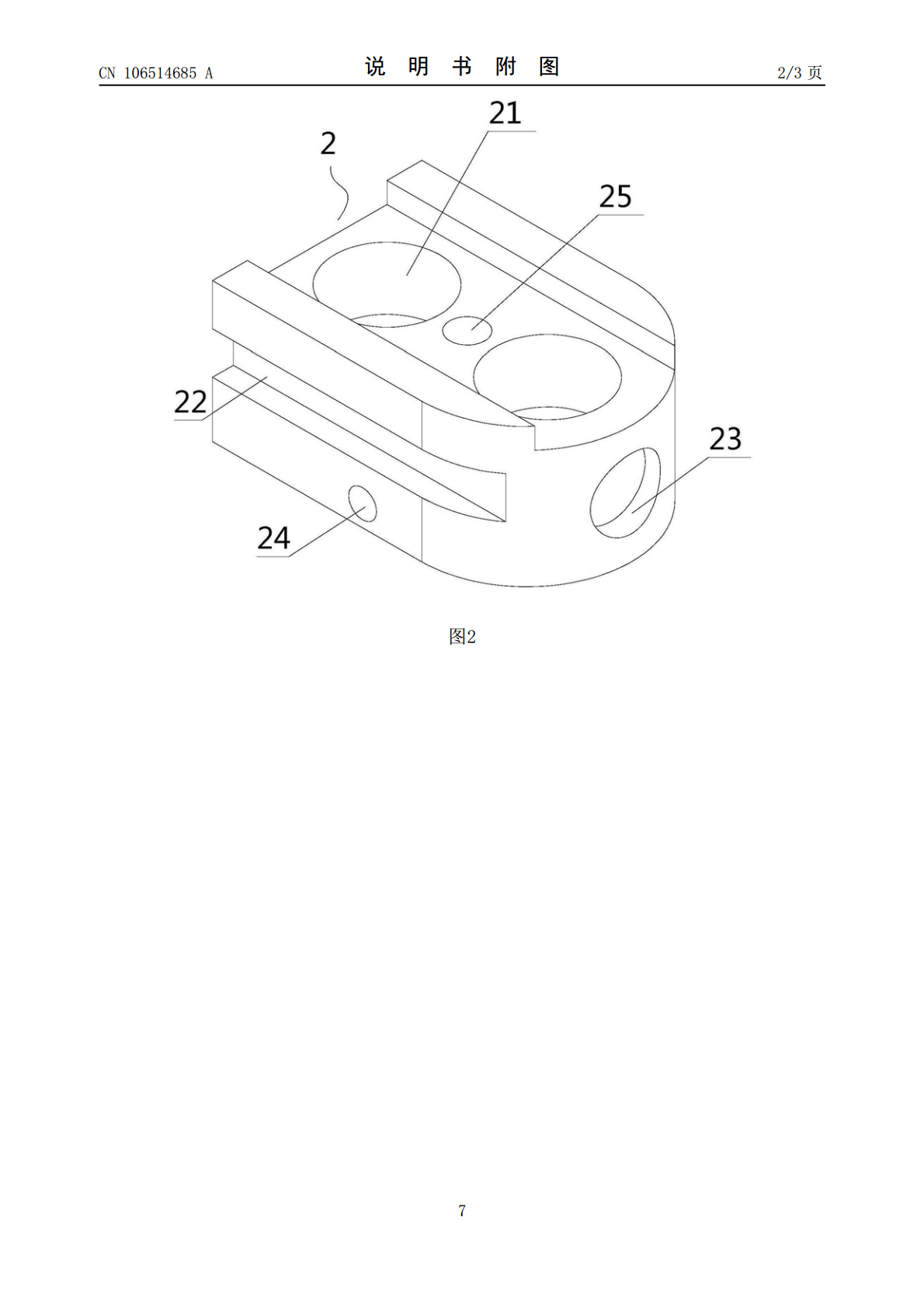
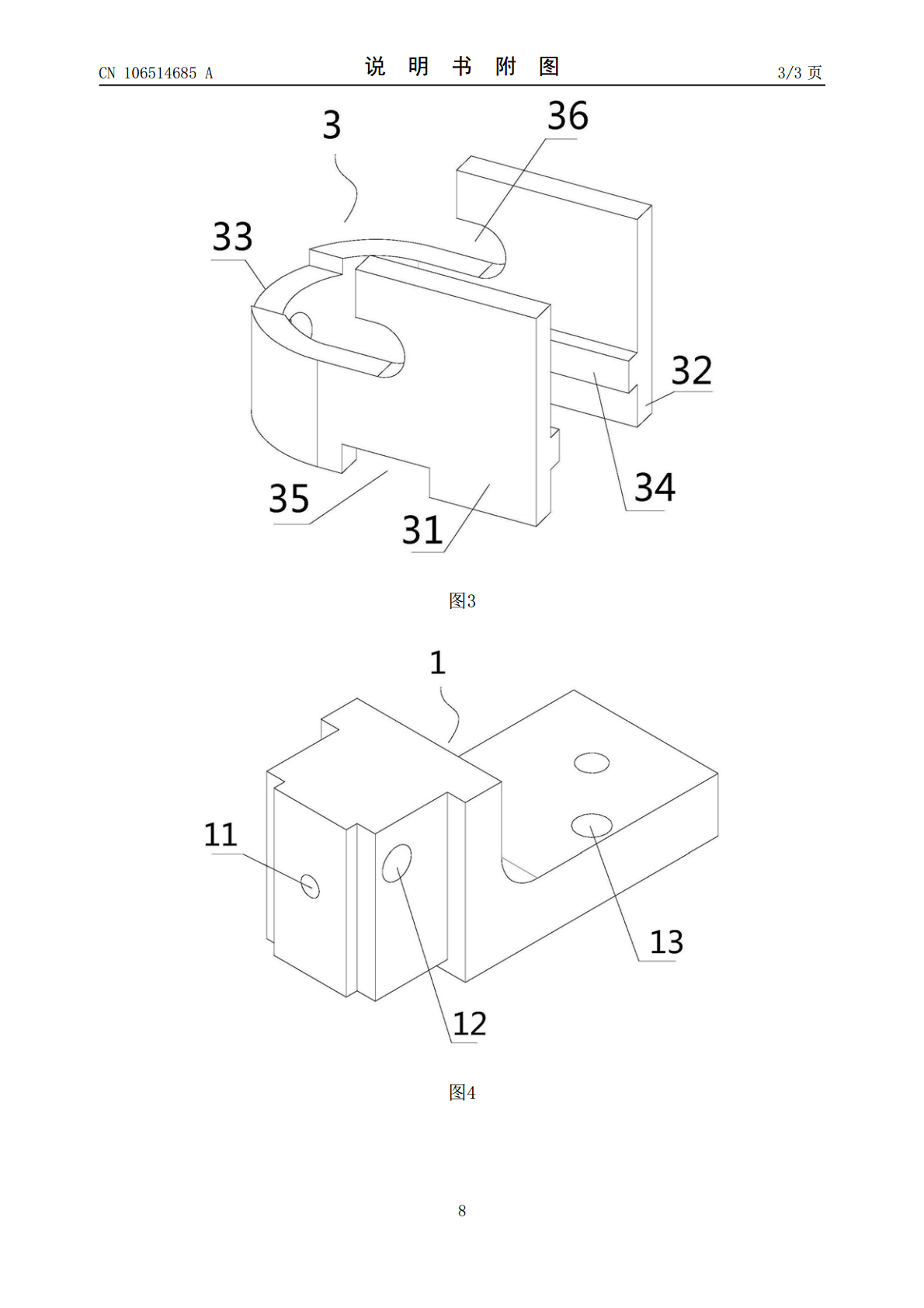
本发明公开了一种机器人快换手指结构,快换手指结构包括连接块和滑块,连接块与滑块的凹槽的侧壁滑动连接,前端板和连接块的第一盲孔之间安装有一个弹簧,左侧板和右侧板底端分别开有一个条形的第一限位槽,连接块下部设有左右贯通的第一销孔,第一销轴左右两端分别伸出连接块的第一销孔左右两侧并分别插入两个第一限位槽中,左侧板和右侧板顶部高出前端板的一段板为伸出板,两个伸出板的前端下部分别开有第二限位槽,手指可拆卸连接在连接块上端,手指上设有左右延伸的第二销孔,第二销孔内设有第二销轴,第二销轴左右两端分别伸出手指左右两侧并分
一种新型快换丝锥结构.pdf
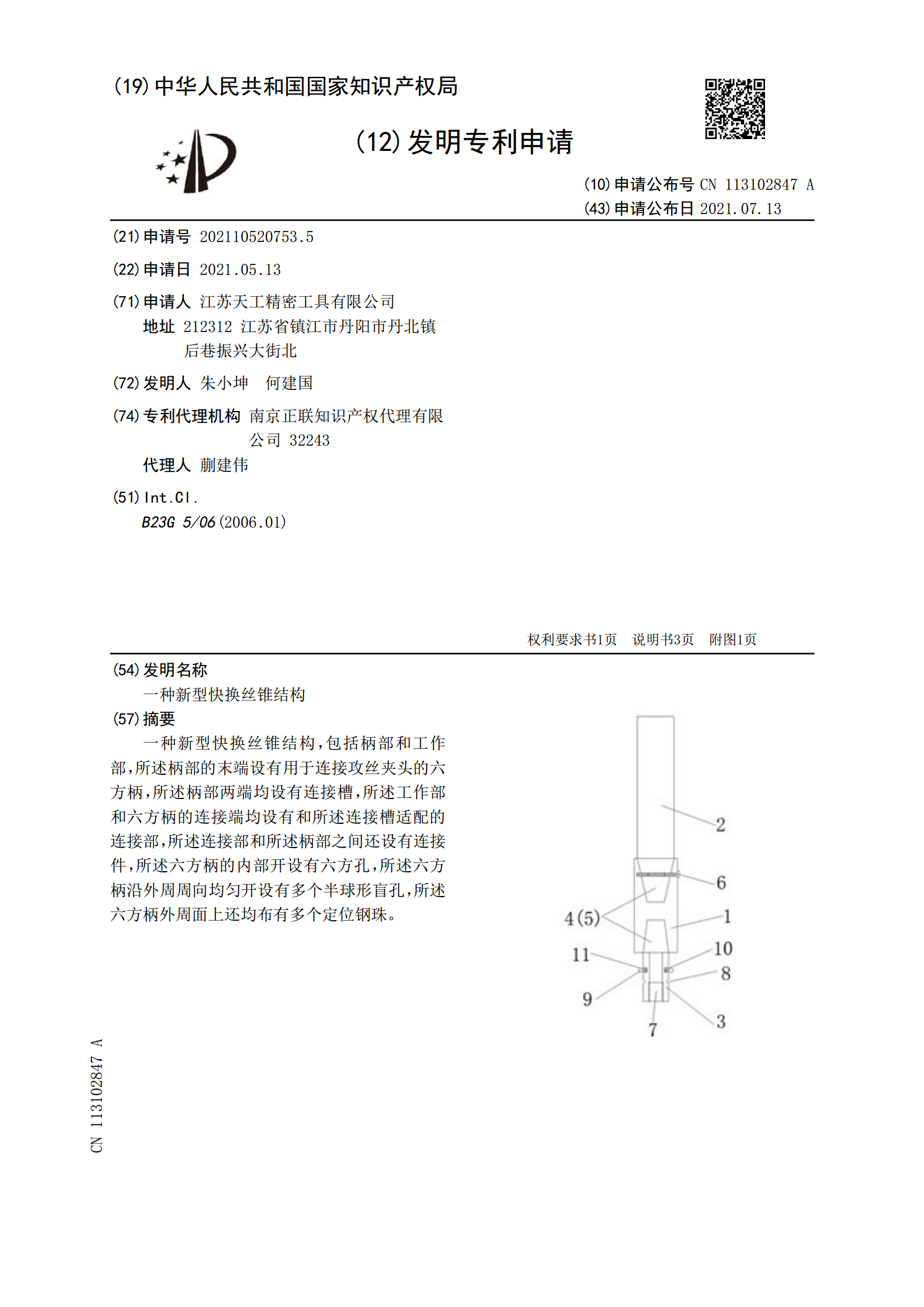
一种新型快换丝锥结构,包括柄部和工作部,所述柄部的末端设有用于连接攻丝夹头的六方柄,所述柄部两端均设有连接槽,所述工作部和六方柄的连接端均设有和所述连接槽适配的连接部,所述连接部和所述柄部之间还设有连接件,所述六方柄的内部开设有六方孔,所述六方柄沿外周周向均匀开设有多个半球形盲孔,所述六方柄外周面上还均布有多个定位钢珠。
一种快换电池包结构.pdf
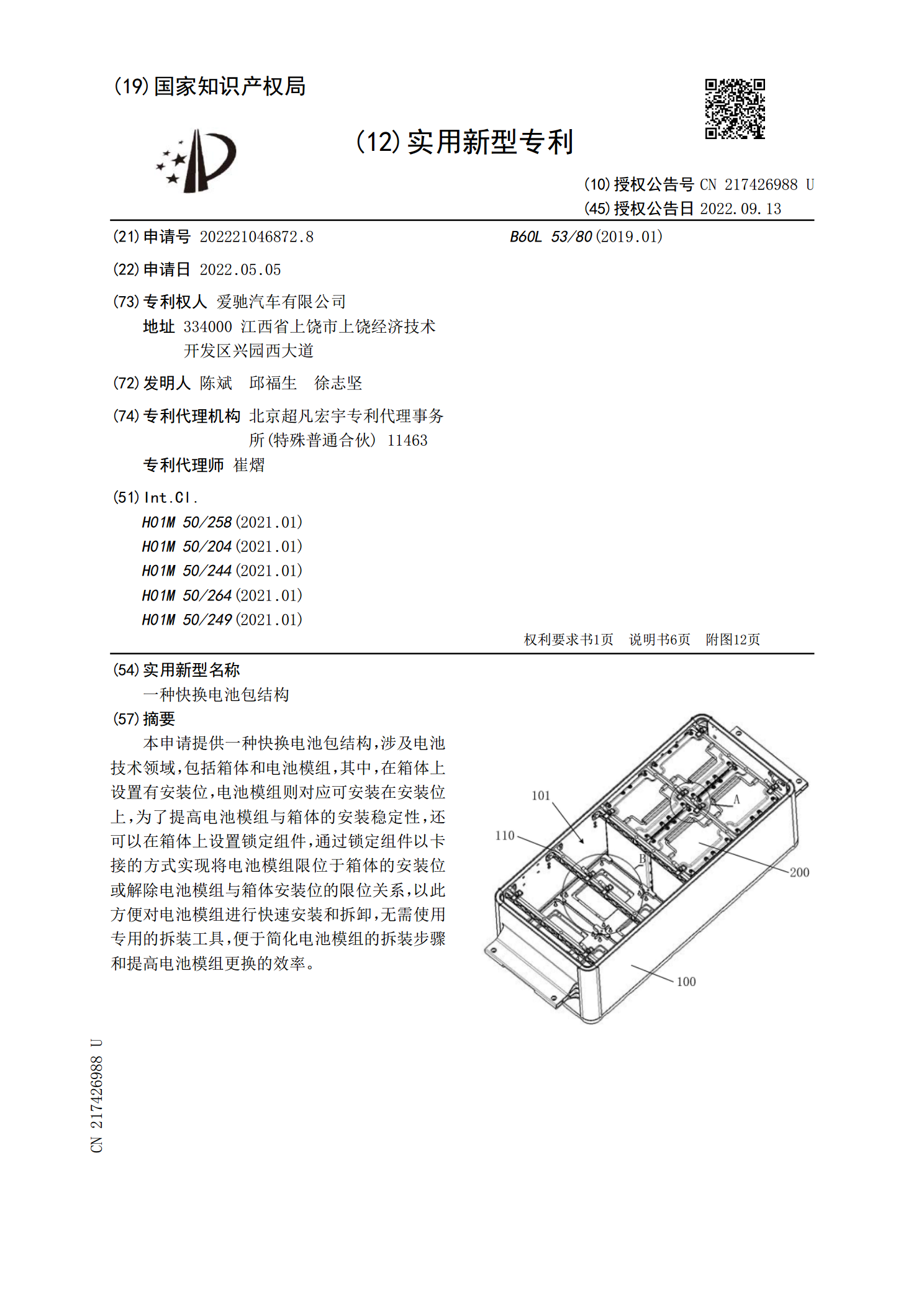
本申请提供一种快换电池包结构,涉及电池技术领域,包括箱体和电池模组,其中,在箱体上设置有安装位,电池模组则对应可安装在安装位上,为了提高电池模组与箱体的安装稳定性,还可以在箱体上设置锁定组件,通过锁定组件以卡接的方式实现将电池模组限位于箱体的安装位或解除电池模组与箱体安装位的限位关系,以此方便对电池模组进行快速安装和拆卸,无需使用专用的拆装工具,便于简化电池模组的拆装步骤和提高电池模组更换的效率。
一种液冷充电枪快换结构.pdf
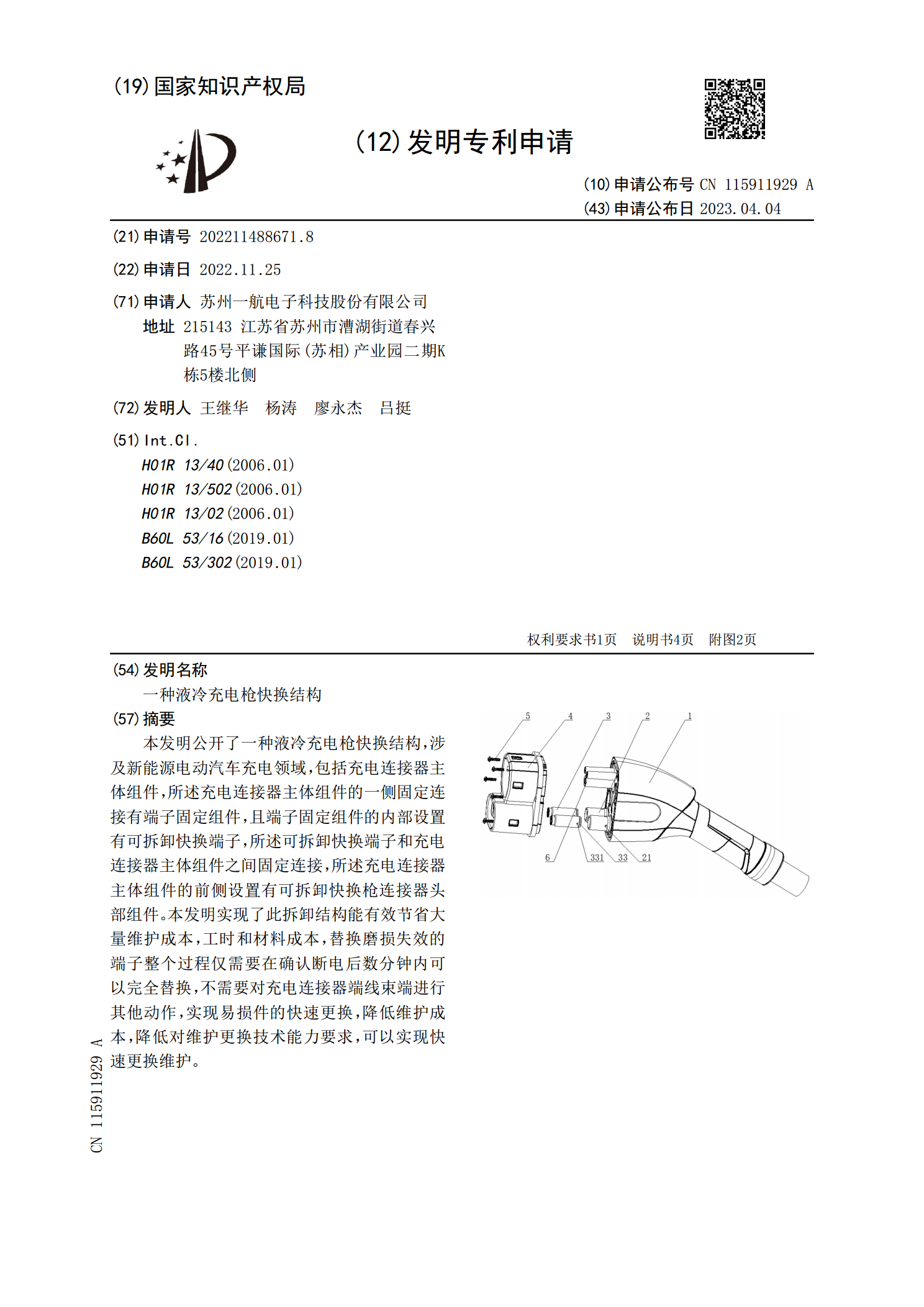
本发明公开了一种液冷充电枪快换结构,涉及新能源电动汽车充电领域,包括充电连接器主体组件,所述充电连接器主体组件的一侧固定连接有端子固定组件,且端子固定组件的内部设置有可拆卸快换端子,所述可拆卸快换端子和充电连接器主体组件之间固定连接,所述充电连接器主体组件的前侧设置有可拆卸快换枪连接器头部组件。本发明实现了此拆卸结构能有效节省大量维护成本,工时和材料成本,替换磨损失效的端子整个过程仅需要在确认断电后数分钟内可以完全替换,不需要对充电连接器端线束端进行其他动作,实现易损件的快速更换,降低维护成本,降低对维护

一种工具头快换结构及工具.pdf
本发明提供的一种工具头快换结构与相应的工具,包括:用于容纳工具头的输出轴体;用于引导输出轴体运动的导向轴体;用于将导向轴体与输出轴体进行弹性连接的弹性体;用于限位工具头在输出轴体内运动的限位组件;用于容纳输出轴体与导向轴体的壳体;其中,所述限位组件包括轴套体与限位体;所述轴套体套设在输出轴体上且与壳体固定连接,且所述轴套体与输出轴体之间具有空隙;所述工具头插入输出轴体的一端上环绕设置有限位槽,所述限位槽供限位体卡入;所述输出轴体上设置有一用以容纳限位体的安装孔。本发明可实现单手插入和取下工具头操作简单方便