
一种履带轮的驱动结构.pdf

春景****23


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种履带轮的驱动结构.pdf
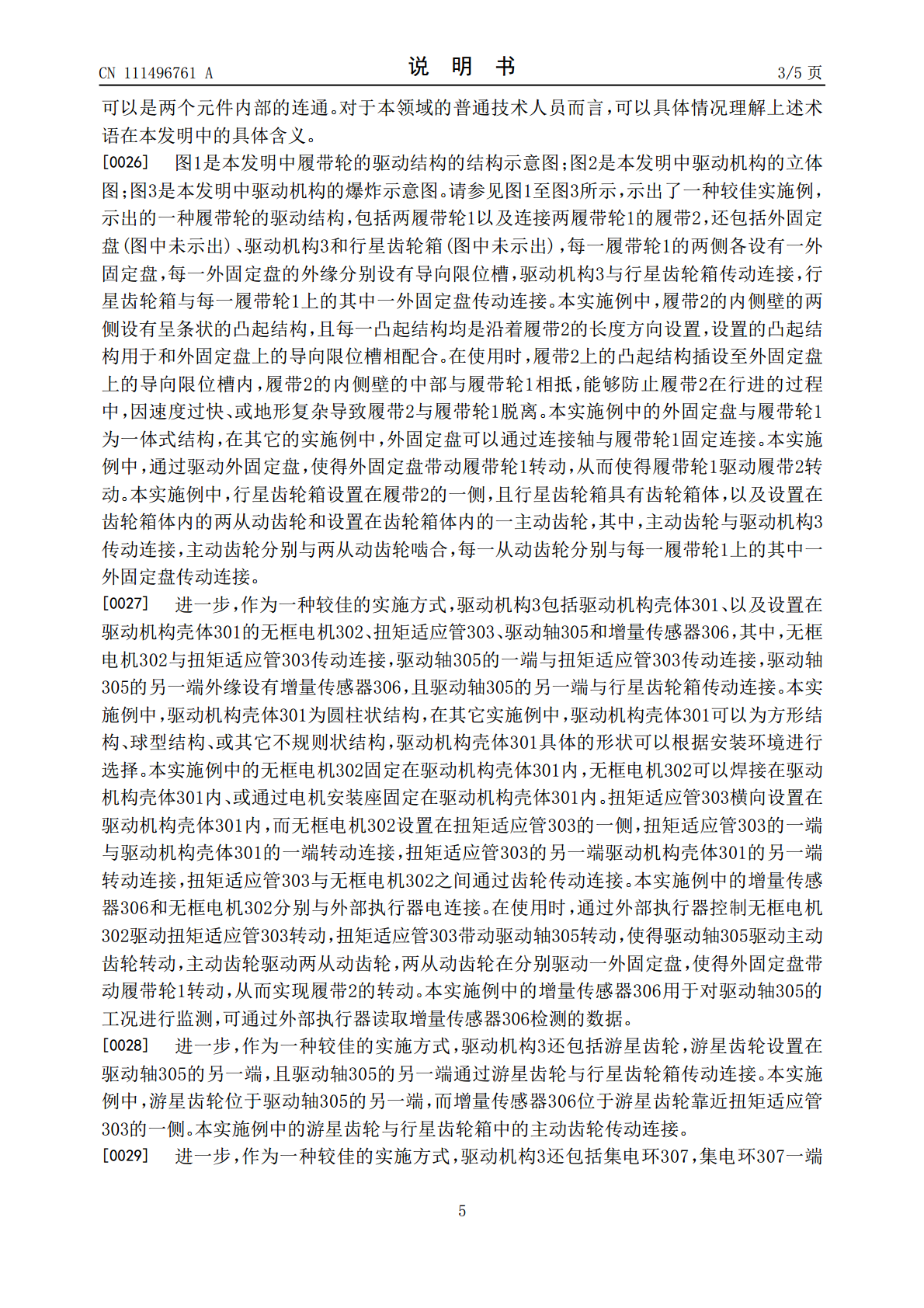
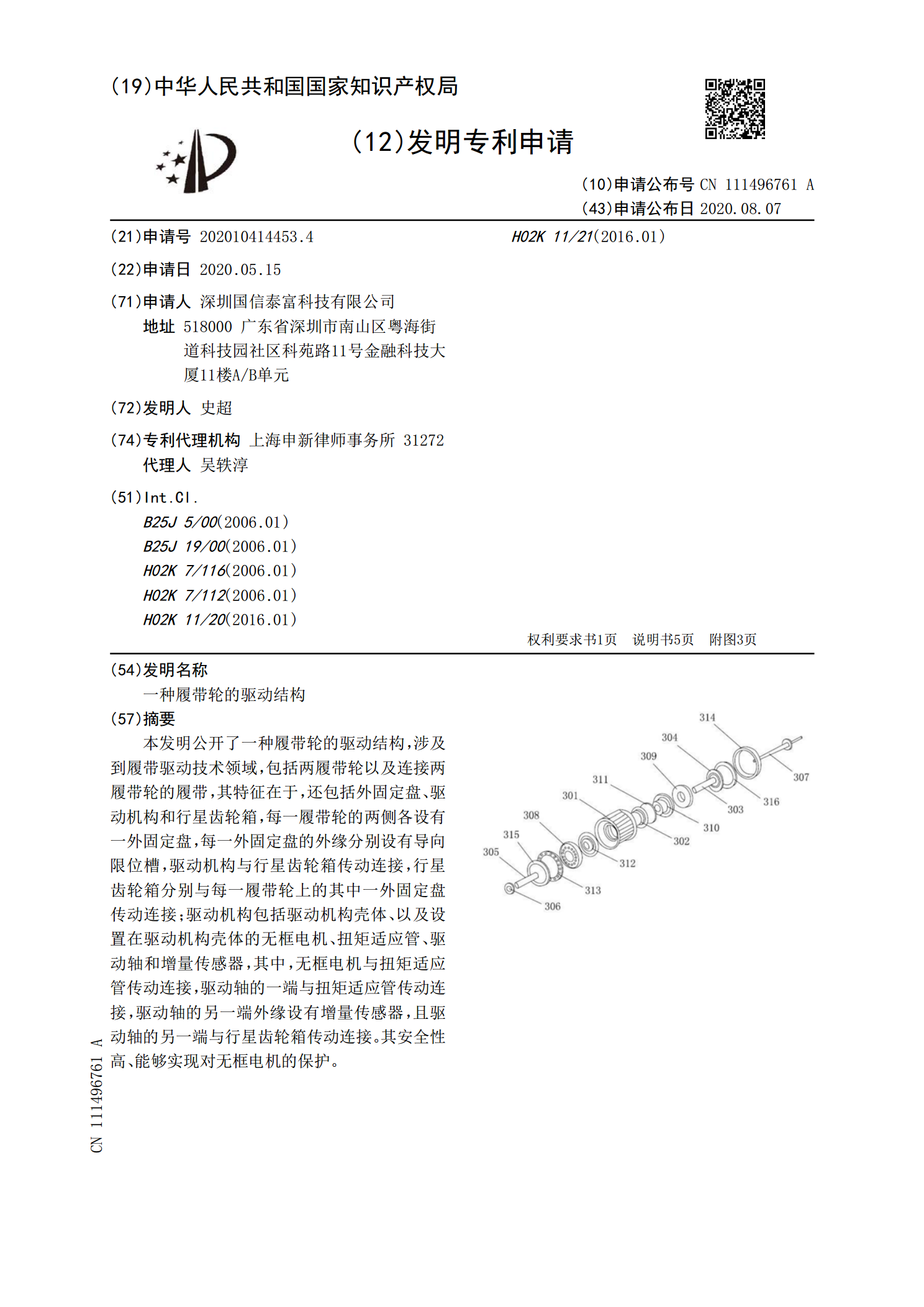
本发明公开了一种履带轮的驱动结构,涉及到履带驱动技术领域,包括两履带轮以及连接两履带轮的履带,其特征在于,还包括外固定盘、驱动机构和行星齿轮箱,每一履带轮的两侧各设有一外固定盘,每一外固定盘的外缘分别设有导向限位槽,驱动机构与行星齿轮箱传动连接,行星齿轮箱分别与每一履带轮上的其中一外固定盘传动连接;驱动机构包括驱动机构壳体、以及设置在驱动机构壳体的无框电机、扭矩适应管、驱动轴和增量传感器,其中,无框电机与扭矩适应管传动连接,驱动轴的一端与扭矩适应管传动连接,驱动轴的另一端外缘设有增量传感器,且驱动轴的另一

一种三角履带轮主动轮驱动结构.pdf
一种三角履带轮主动轮驱动结构,包括三角履带轮(1)、主动轮(2)、轮边传动轴(3)、上摆臂(4)、下摆臂(5)、连接螺栓(6)、带轴承室骨架(7)、滚动轴承(8)、轴承端盖(9),三角履带轮(1)所含的主动轮(2)通过连接螺栓(6)与轮边传动轴(3)连接,带轴承室骨架(7)与上摆臂(4)、下摆臂(5)通过销轴连接,主动轮(2)通过滚动轴承(8)与带轴承室骨架(7)连接,轴承室外部用轴承端盖(9)锁紧。本发明有效解决了传统的三角履带轮式车辆主动轮驱动效率低、整车车高过高的问题。
一种橡胶带式履带驱动结构.pdf
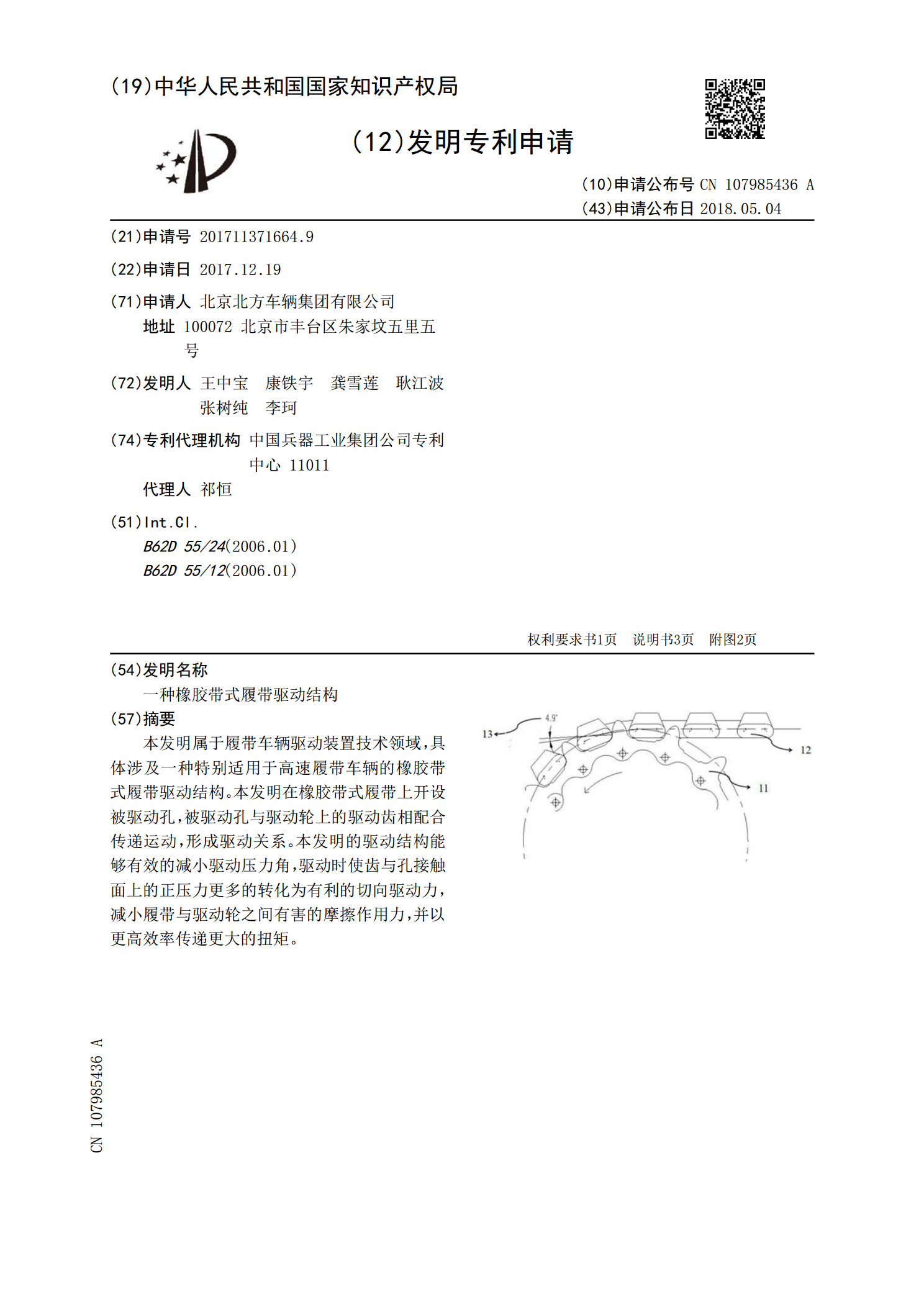
本发明属于履带车辆驱动装置技术领域,具体涉及一种特别适用于高速履带车辆的橡胶带式履带驱动结构。本发明在橡胶带式履带上开设被驱动孔,被驱动孔与驱动轮上的驱动齿相配合传递运动,形成驱动关系。本发明的驱动结构能够有效的减小驱动压力角,驱动时使齿与孔接触面上的正压力更多的转化为有利的切向驱动力,减小履带与驱动轮之间有害的摩擦作用力,并以更高效率传递更大的扭矩。
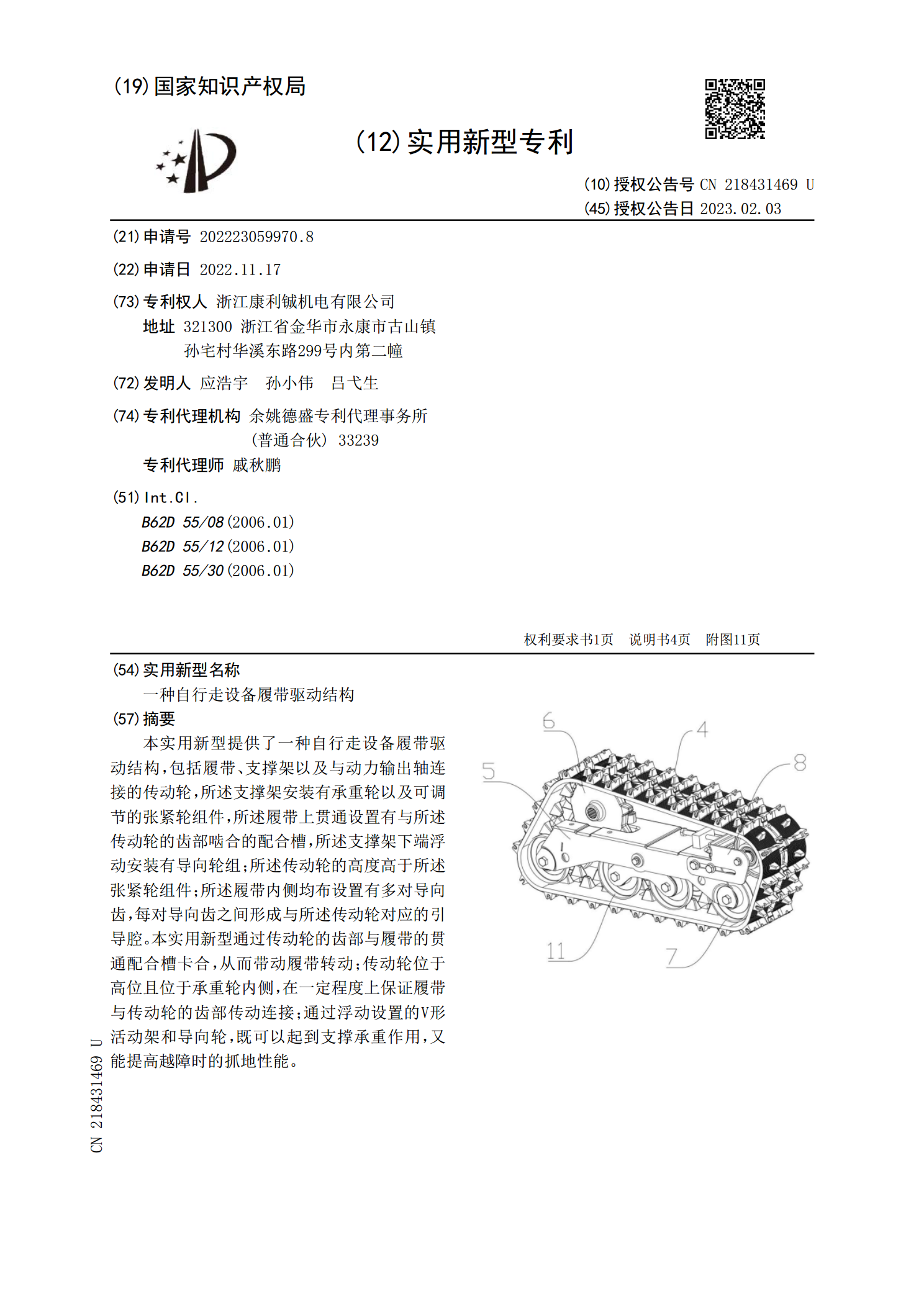
一种自行走设备履带驱动结构.pdf
本实用新型提供了一种自行走设备履带驱动结构,包括履带、支撑架以及与动力输出轴连接的传动轮,所述支撑架安装有承重轮以及可调节的张紧轮组件,所述履带上贯通设置有与所述传动轮的齿部啮合的配合槽,所述支撑架下端浮动安装有导向轮组;所述传动轮的高度高于所述张紧轮组件;所述履带内侧均布设置有多对导向齿,每对导向齿之间形成与所述传动轮对应的引导腔。本实用新型通过传动轮的齿部与履带的贯通配合槽卡合,从而带动履带转动;传动轮位于高位且位于承重轮内侧,在一定程度上保证履带与传动轮的齿部传动连接;通过浮动设置的V形活动架和导向
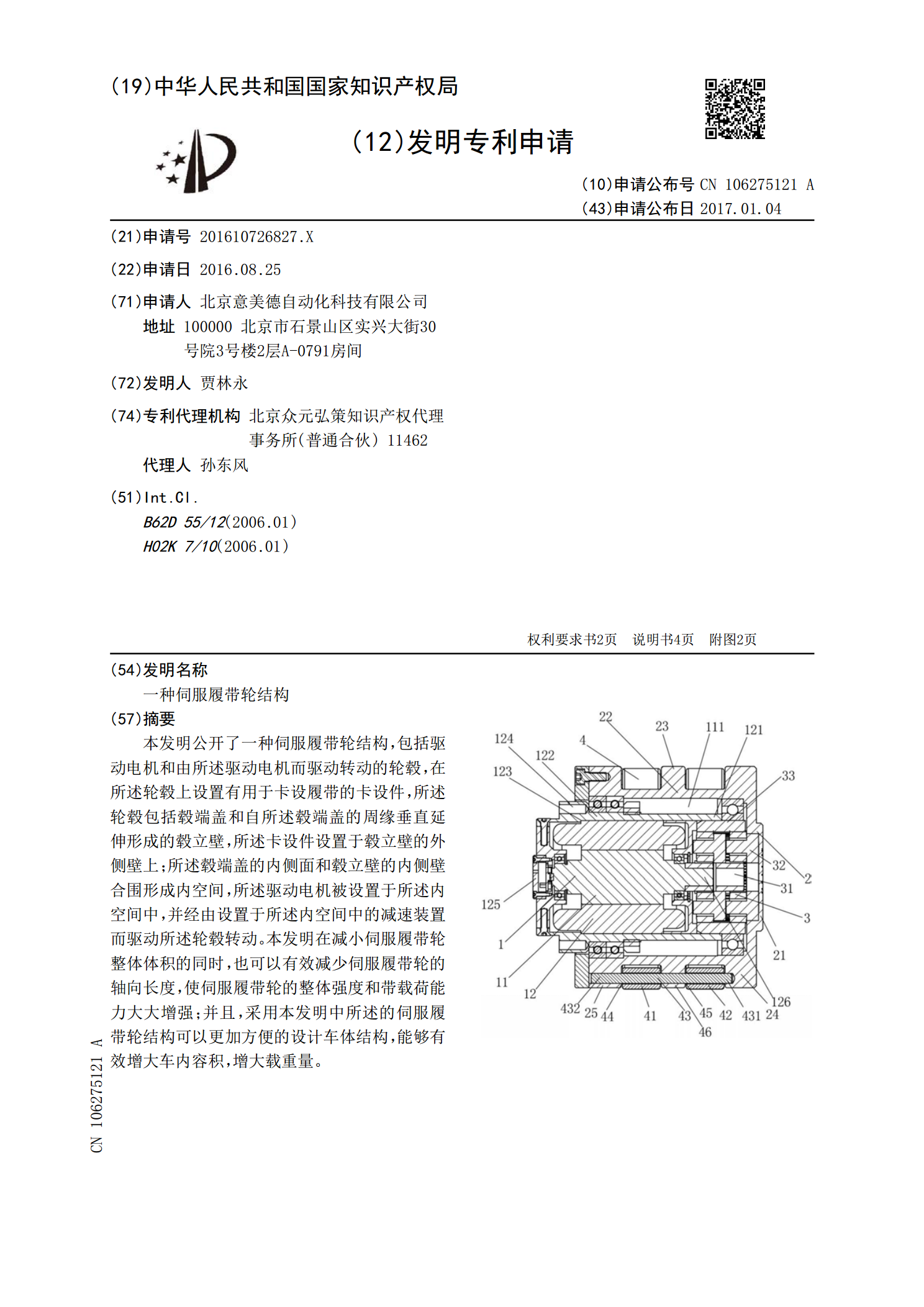
一种伺服履带轮结构.pdf
本发明公开了一种伺服履带轮结构,包括驱动电机和由所述驱动电机而驱动转动的轮毂,在所述轮毂上设置有用于卡设履带的卡设件,所述轮毂包括毂端盖和自所述毂端盖的周缘垂直延伸形成的毂立壁,所述卡设件设置于毂立壁的外侧壁上;所述毂端盖的内侧面和毂立壁的内侧壁合围形成内空间,所述驱动电机被设置于所述内空间中,并经由设置于所述内空间中的减速装置而驱动所述轮毂转动。本发明在减小伺服履带轮整体体积的同时,也可以有效减少伺服履带轮的轴向长度,使伺服履带轮的整体强度和带载荷能力大大增强;并且,采用本发明中所述的伺服履带轮结构可以