
一种基于线激光传感器的叶片轮廓测量方法及装置和系统.pdf

子安****吖吖


1/10

2/10

3/10
4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于线激光传感器的叶片轮廓测量方法及装置和系统.pdf
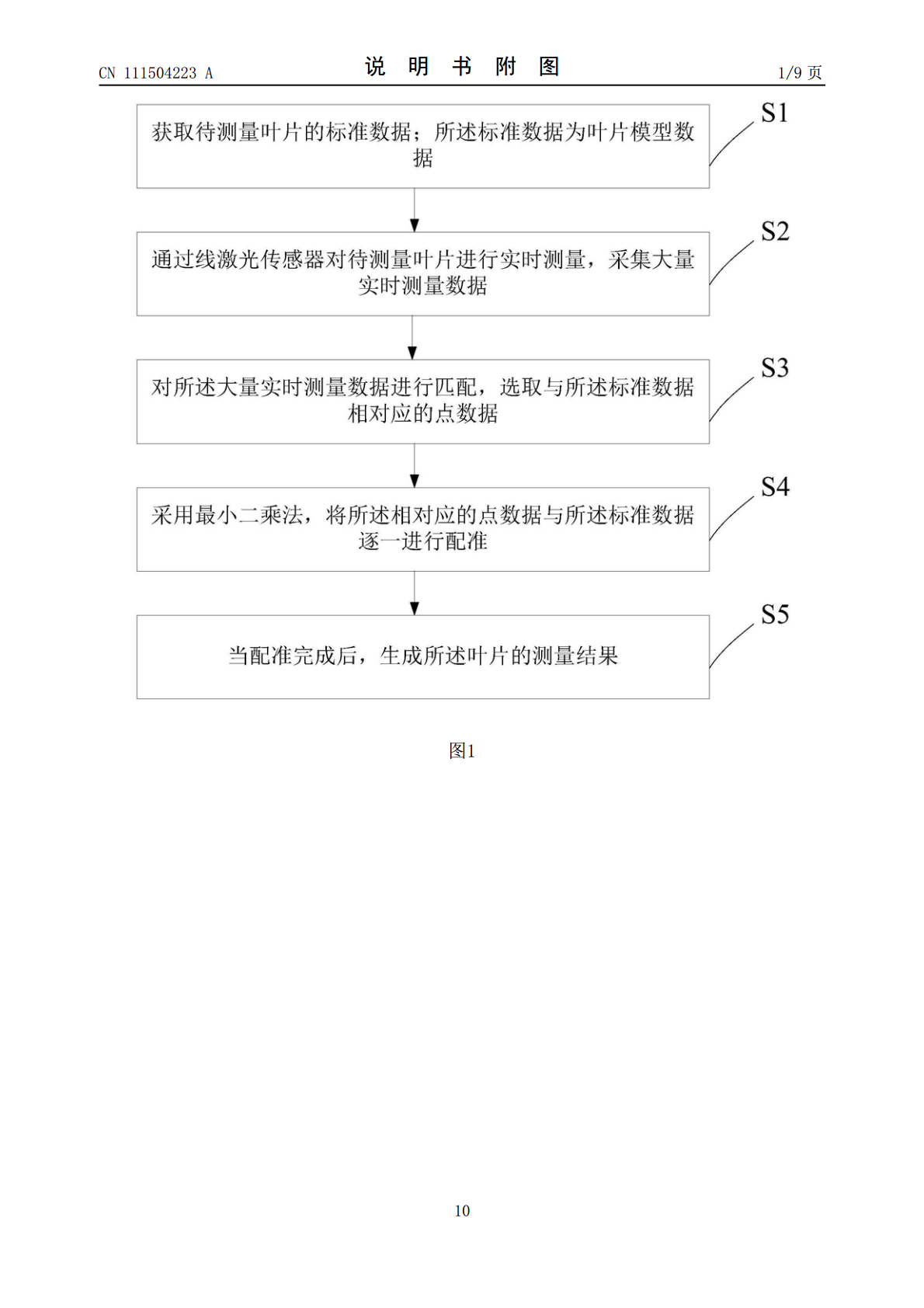
本发明公开了一种基于线激光传感器的叶片轮廓测量方法及装置和系统,其中,基于线激光传感器的叶片轮廓测量方法包括:基于线激光传感器对待测量叶片进行实时测量,采集大量实时测量数据;对所述大量实时测量数据进行匹配,选取与所述标准数据相对应的点数据;采用最小二乘法,将所述相对应的点数据与所述标准数据逐一进行配准;当配准完成后,生成所述叶片的测量结果。该方法基于线激光传感器做为叶片轮廓测量工具,结合叶片模型数据,采用最小二乘法配准叶片轮廓,实现快速测量;与三坐标测量相比,在测量精度相当的情况下,测量效率显著提高。
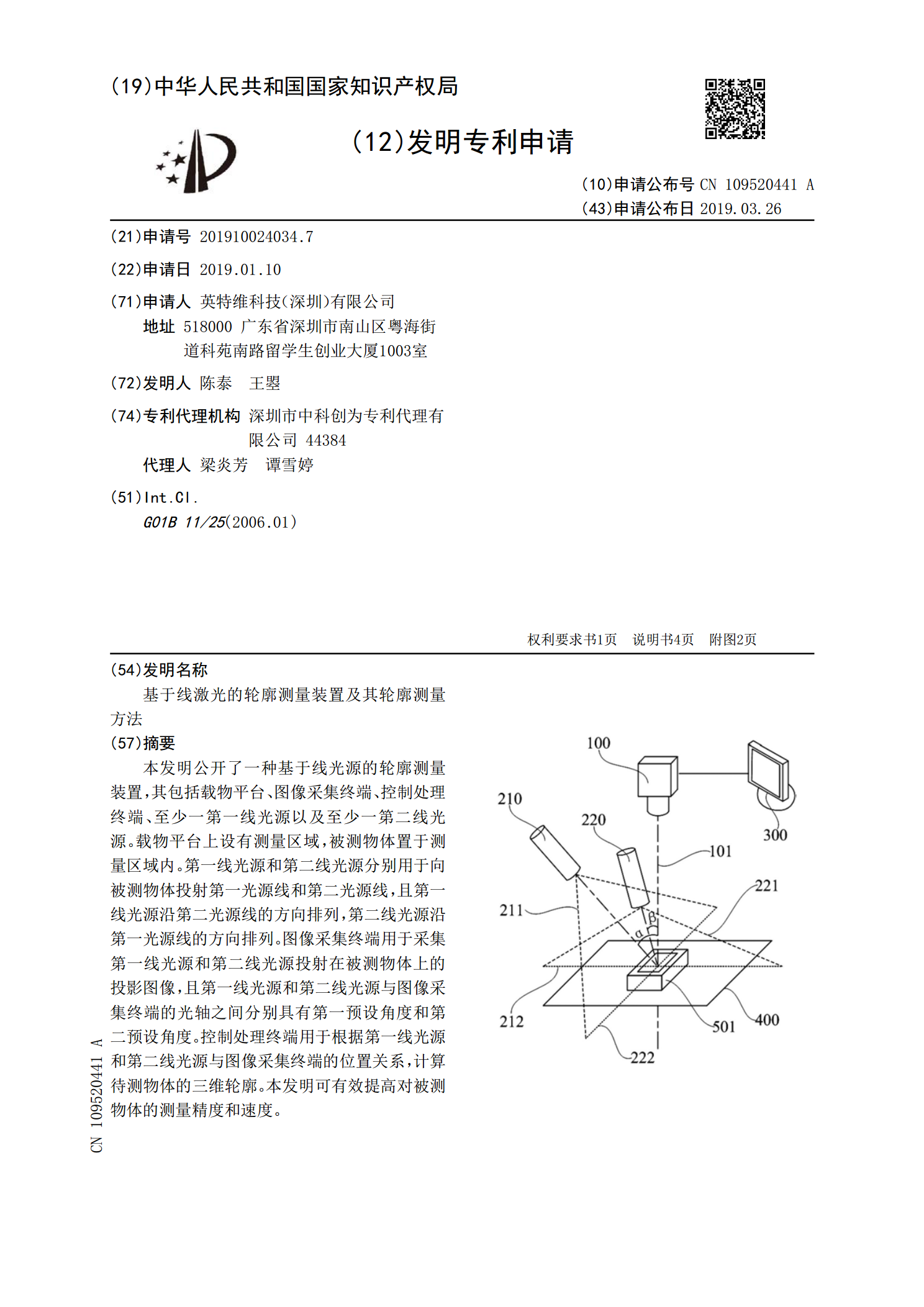
基于线激光的轮廓测量装置及其轮廓测量方法.pdf
本发明公开了一种基于线光源的轮廓测量装置,其包括载物平台、图像采集终端、控制处理终端、至少一第一线光源以及至少一第二线光源。载物平台上设有测量区域,被测物体置于测量区域内。第一线光源和第二线光源分别用于向被测物体投射第一光源线和第二光源线,且第一线光源沿第二光源线的方向排列,第二线光源沿第一光源线的方向排列。图像采集终端用于采集第一线光源和第二线光源投射在被测物体上的投影图像,且第一线光源和第二线光源与图像采集终端的光轴之间分别具有第一预设角度和第二预设角度。控制处理终端用于根据第一线光源和第二线光源与图

一种基于线激光器的截面轮廓标记装置及其检测装置.pdf
本发明公开了一种基于线激光器的截面轮廓标记装置,包括机架、标记单元、供电装置,所述标记单元设置在所述机架上,所述线激光器、激光反射单元设置在所述被测物的两侧。此外,本发明还提供了一种截面轮廓检测装置,包括上述标记装置、成像采集装置、处理装置,所述成像采集装置设置在所述标记装置附近的所述机架上,所述成像采集装置用于获取所述被测物圆周面上的标记线信息,所述成像采集装置收到被测物的反射光线与所述被测物成锐角;所述处理装置与所述采集装置相连。该检测装置结构简单、调校方便结,且检测精度高。

一种挂车轮廓尺寸测量方法、装置和系统.pdf
本发明提供一种挂车轮廓尺寸测量方法、装置和系统,所述方法包括:利用第一激光测距单元采集到的待测仓栅式挂车在不同时刻的第一测距信息,获取所述挂车的侧面轮廓信息;利用第二激光测距单元采集到的所述挂车在不同时刻的第二测距信息,获取所述挂车的顶部轮廓信息;根据所述侧面轮廓信息和所述顶部轮廓信息,得到所述挂车的轮廓尺寸信息;其中,所述轮廓尺寸信息包括:所述挂车的长度、销轴距和栏板高度中的至少一个。本发明提供的挂车轮廓尺寸测量方法、装置和系统,可以提高测量精度和检车效率,所述系统结构简单,成本低,非常适合机动车检测站
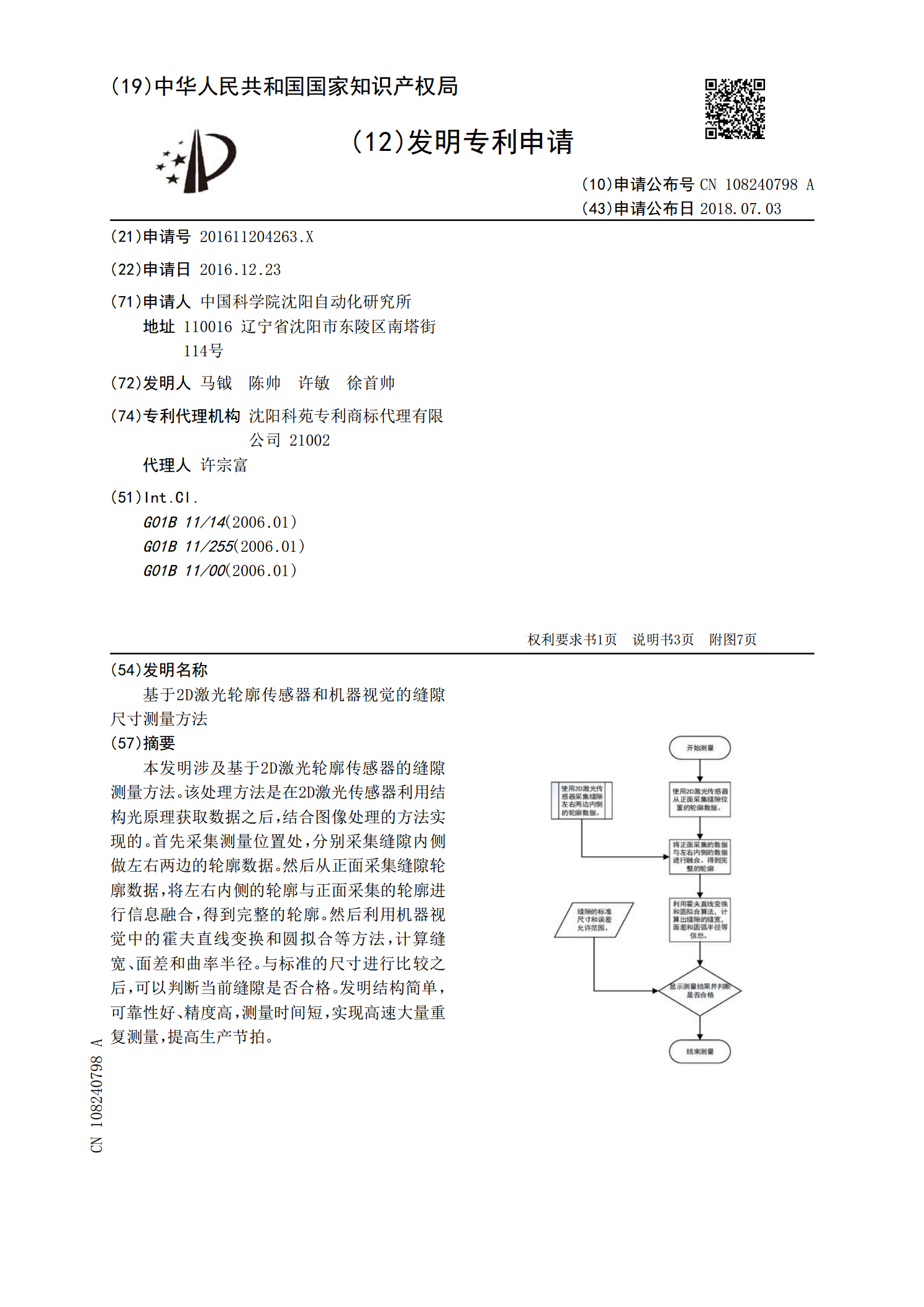
基于2D激光轮廓传感器和机器视觉的缝隙尺寸测量方法.pdf
本发明涉及基于2D激光轮廓传感器的缝隙测量方法。该处理方法是在2D激光传感器利用结构光原理获取数据之后,结合图像处理的方法实现的。首先采集测量位置处,分别采集缝隙内侧做左右两边的轮廓数据。然后从正面采集缝隙轮廓数据,将左右内侧的轮廓与正面采集的轮廓进行信息融合,得到完整的轮廓。然后利用机器视觉中的霍夫直线变换和圆拟合等方法,计算缝宽、面差和曲率半径。与标准的尺寸进行比较之后,可以判断当前缝隙是否合格。发明结构简单,可靠性好、精度高,测量时间短,实现高速大量重复测量,提高生产节拍。