
重载移动式机械臂.pdf

是你****岺呀


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
重载移动式机械臂.pdf
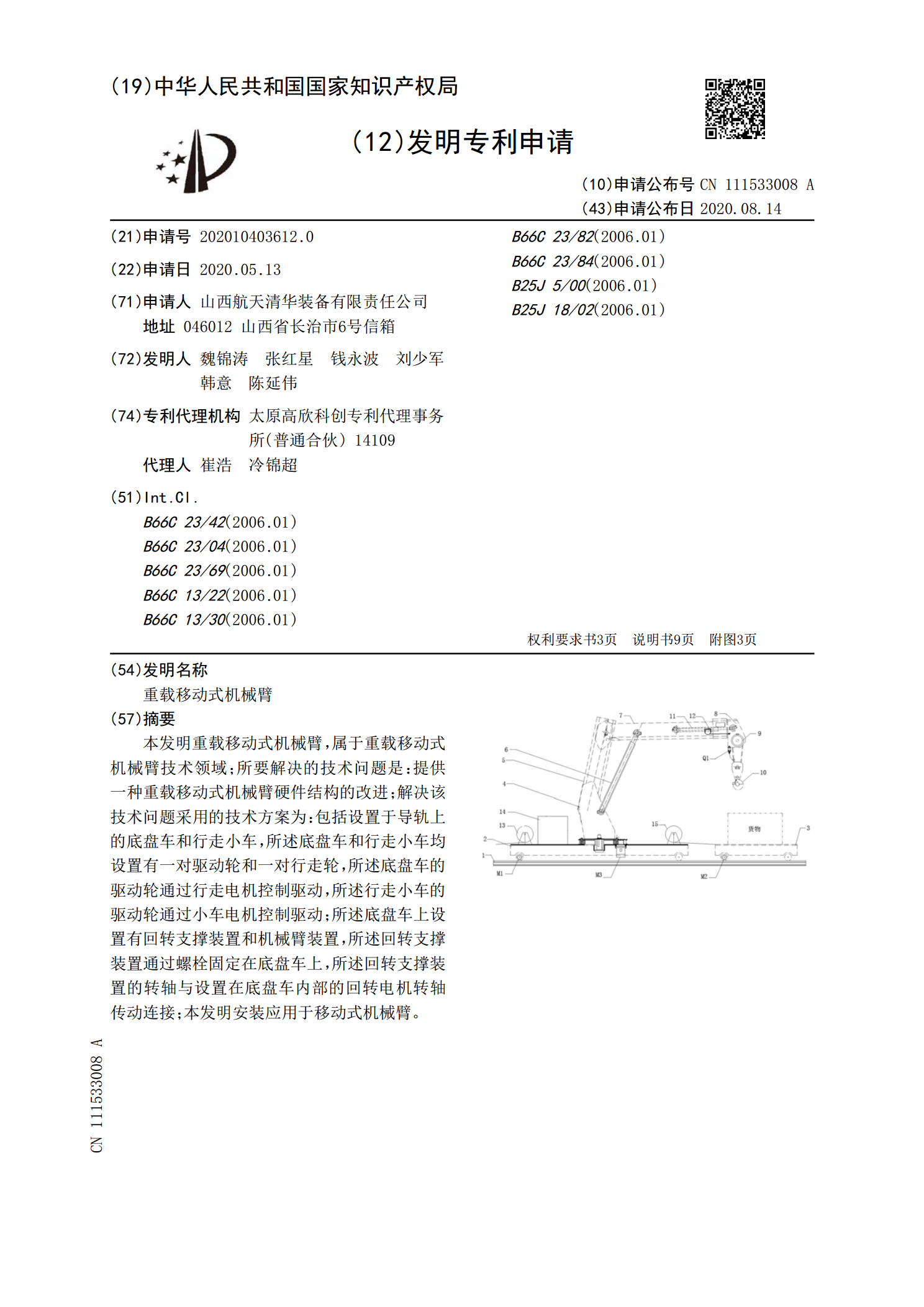
本发明重载移动式机械臂,属于重载移动式机械臂技术领域;所要解决的技术问题是:提供一种重载移动式机械臂硬件结构的改进;解决该技术问题采用的技术方案为:包括设置于导轨上的底盘车和行走小车,所述底盘车和行走小车均设置有一对驱动轮和一对行走轮,所述底盘车的驱动轮通过行走电机控制驱动,所述行走小车的驱动轮通过小车电机控制驱动;所述底盘车上设置有回转支撑装置和机械臂装置,所述回转支撑装置通过螺栓固定在底盘车上,所述回转支撑装置的转轴与设置在底盘车内部的回转电机转轴传动连接;本发明安装应用于移动式机械臂。

液压重载机械臂转台支座结构优化.docx
液压重载机械臂转台支座结构优化液压重载机械臂转台支座结构优化随着工业化进程的加速和机械化程度的提高,重工业设备的应用越来越广泛,液压重载机械臂便是其中之一。液压重载机械臂由于具有承载能力强、作业效率高、操作控制方便等特点,广泛应用于各种工业生产和建设领域。然而,由于机械臂的特殊结构,臂架和支座常常受到巨大的压力和扭转力,导致其在长时间使用后容易出现疲劳断裂的情况,因此如何优化液压重载机械臂转台支座结构就成为了重要的研究方向。本文将探讨如何优化液压重载机械臂转台支座结构,以提高其承载能力和使用寿命。一、液压

基于ROS的液压重载机械臂避障仿真.pptx
汇报人:/目录0102ROS系统概述ROS系统组成ROS系统工作原理ROS系统应用领域03液压重载机械臂概述液压重载机械臂结构液压重载机械臂工作原理液压重载机械臂应用领域04避障仿真概述避障算法选择避障仿真实现流程避障仿真实验结果分析05优点分析缺点分析改进方向06应用前景概述技术发展趋势市场前景展望汇报人:

一种防尘的重载荷机械臂以及重载机器人.pdf
一种防尘的重载荷机械臂以及重载机器人。本发明公开了一种防尘的重载荷机械臂,包括至少一个伸缩机构,伸缩机构的外表面设有防尘罩;防尘罩呈波纹管结构,其管壁由基层和薄膜层组成,基层和薄膜层在相互吸引力作用下粘在一起,基层的两端搭接在机械臂壳体的表面,且在基层的其中一端头外表面设有突出环,突出环上套有限位环,突出环和限位环之间留有间隙,薄膜层的其中一端头与基层固定连接,另一端头穿过突出环和限位环之间的间隙。本发明的优点在于可快速完成清理,相对于传统方式中一道道沟槽的擦拭,大幅度提升了清理速度,并且清理的更加彻底。
一种模块化重载机械臂关节.pdf
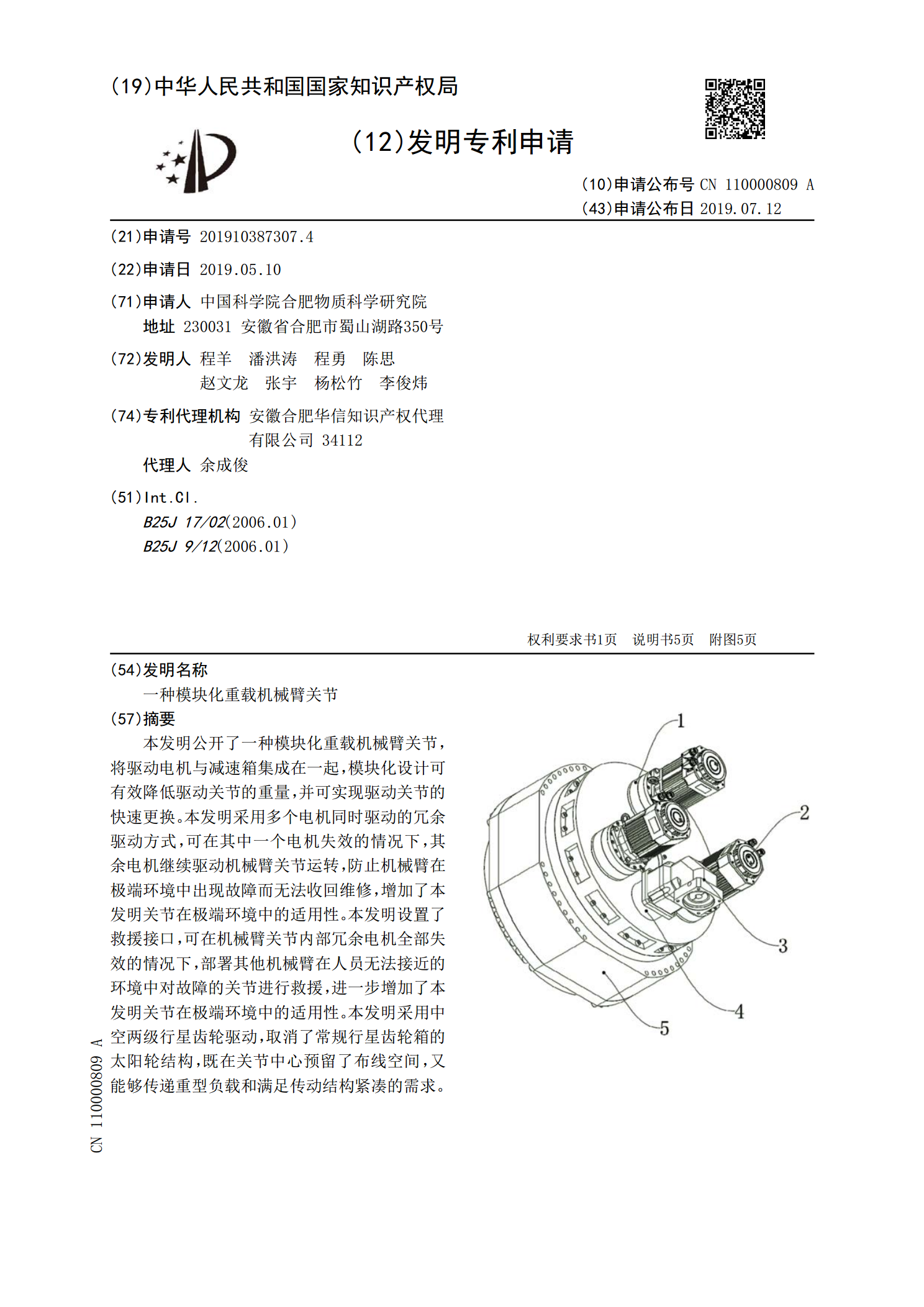
本发明公开了一种模块化重载机械臂关节,将驱动电机与减速箱集成在一起,模块化设计可有效降低驱动关节的重量,并可实现驱动关节的快速更换。本发明采用多个电机同时驱动的冗余驱动方式,可在其中一个电机失效的情况下,其余电机继续驱动机械臂关节运转,防止机械臂在极端环境中出现故障而无法收回维修,增加了本发明关节在极端环境中的适用性。本发明设置了救援接口,可在机械臂关节内部冗余电机全部失效的情况下,部署其他机械臂在人员无法接近的环境中对故障的关节进行救援,进一步增加了本发明关节在极端环境中的适用性。本发明采用中空两级行星