
基于ROS的液压重载机械臂避障仿真.pptx

快乐****蜜蜂

1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于ROS的液压重载机械臂避障仿真.pptx
汇报人:/目录0102ROS系统概述ROS系统组成ROS系统工作原理ROS系统应用领域03液压重载机械臂概述液压重载机械臂结构液压重载机械臂工作原理液压重载机械臂应用领域04避障仿真概述避障算法选择避障仿真实现流程避障仿真实验结果分析05优点分析缺点分析改进方向06应用前景概述技术发展趋势市场前景展望汇报人:

基于ROS的机械臂结合RGBD相机避障运动规划.docx
基于ROS的机械臂结合RGBD相机避障运动规划基于ROS的机械臂结合RGBD相机避障运动规划摘要:机械臂在工业自动化和服务机器人等领域起着关键的作用。然而,现实世界中存在许多障碍物,机械臂的运动规划阶段必须能够识别和避开这些障碍物。本论文研究了基于ROS的机械臂结合RGBD相机的避障运动规划方法。该方法使用RGBD相机获取环境信息,并利用ROS进行数据处理和机械臂控制。1.引言机械臂在工业自动化中的应用越来越广泛。然而,机械臂在实际应用中需要面对许多复杂的环境,并且需要能够在这些环境中进行安全和高效的运动
基于ROS的六自由度机械臂环境探测与避障.pptx
汇报人:/目录0102ROS背景ROS功能ROS特点ROS应用场景03六自由度机械臂结构六自由度机械臂工作原理六自由度机械臂控制方式六自由度机械臂应用领域04传感器介绍传感器工作原理传感器数据处理传感器应用场景05避障算法分类避障算法原理避障算法实现方式避障算法优缺点比较06系统总体设计硬件选型与配置软件设计流程系统测试与验证07系统应用领域系统应用案例技术发展趋势与展望汇报人:
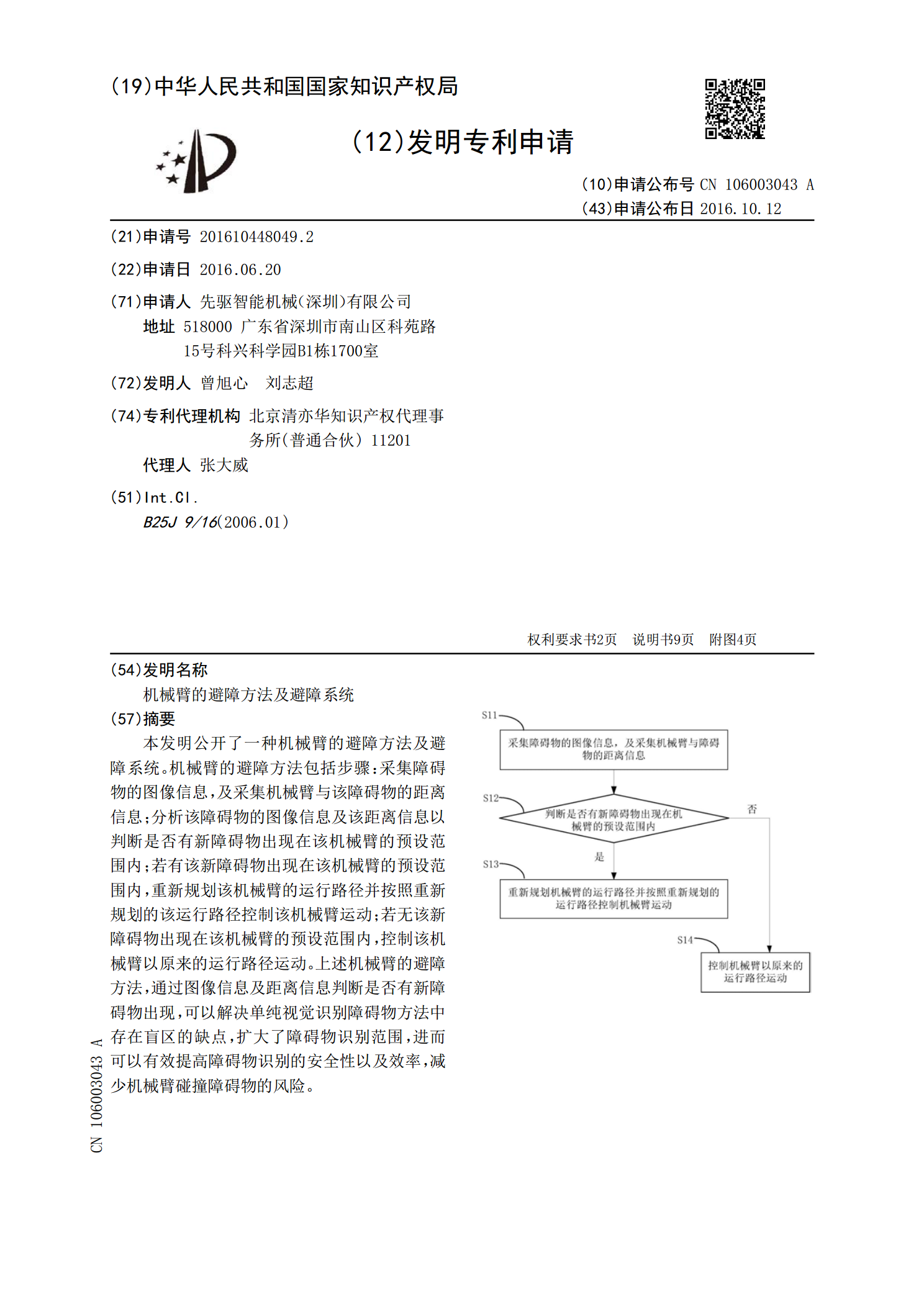
机械臂的避障方法及避障系统.pdf
本发明公开了一种机械臂的避障方法及避障系统。机械臂的避障方法包括步骤:采集障碍物的图像信息,及采集机械臂与该障碍物的距离信息;分析该障碍物的图像信息及该距离信息以判断是否有新障碍物出现在该机械臂的预设范围内;若有该新障碍物出现在该机械臂的预设范围内,重新规划该机械臂的运行路径并按照重新规划的该运行路径控制该机械臂运动;若无该新障碍物出现在该机械臂的预设范围内,控制该机械臂以原来的运行路径运动。上述机械臂的避障方法,通过图像信息及距离信息判断是否有新障碍物出现,可以解决单纯视觉识别障碍物方法中存在盲区的缺点

基于改进势场法的机械臂动态避障规划.docx
基于改进势场法的机械臂动态避障规划基于改进势场法的机械臂动态避障规划摘要:机械臂在工业自动化领域中起着重要作用,但在复杂环境中的动态避障仍然是一个具有挑战性的问题。针对传统势场法在避障过程中容易陷入局部最优、对动态障碍物响应较差的问题,本文提出了一种基于改进势场法的机械臂动态避障规划方法。该方法通过引入运动预测模块和速度控制模块,实现了机械臂对动态障碍物的主动避让和动态路径规划。通过实验验证,本文的方法相比传统势场法具有更好的避障性能和实时性,能够高效并安全地完成各种复杂环境下的任务。关键词:机械臂;动态