
一种空间精密位姿对准方法.pdf

佳晨****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种空间精密位姿对准方法.pdf
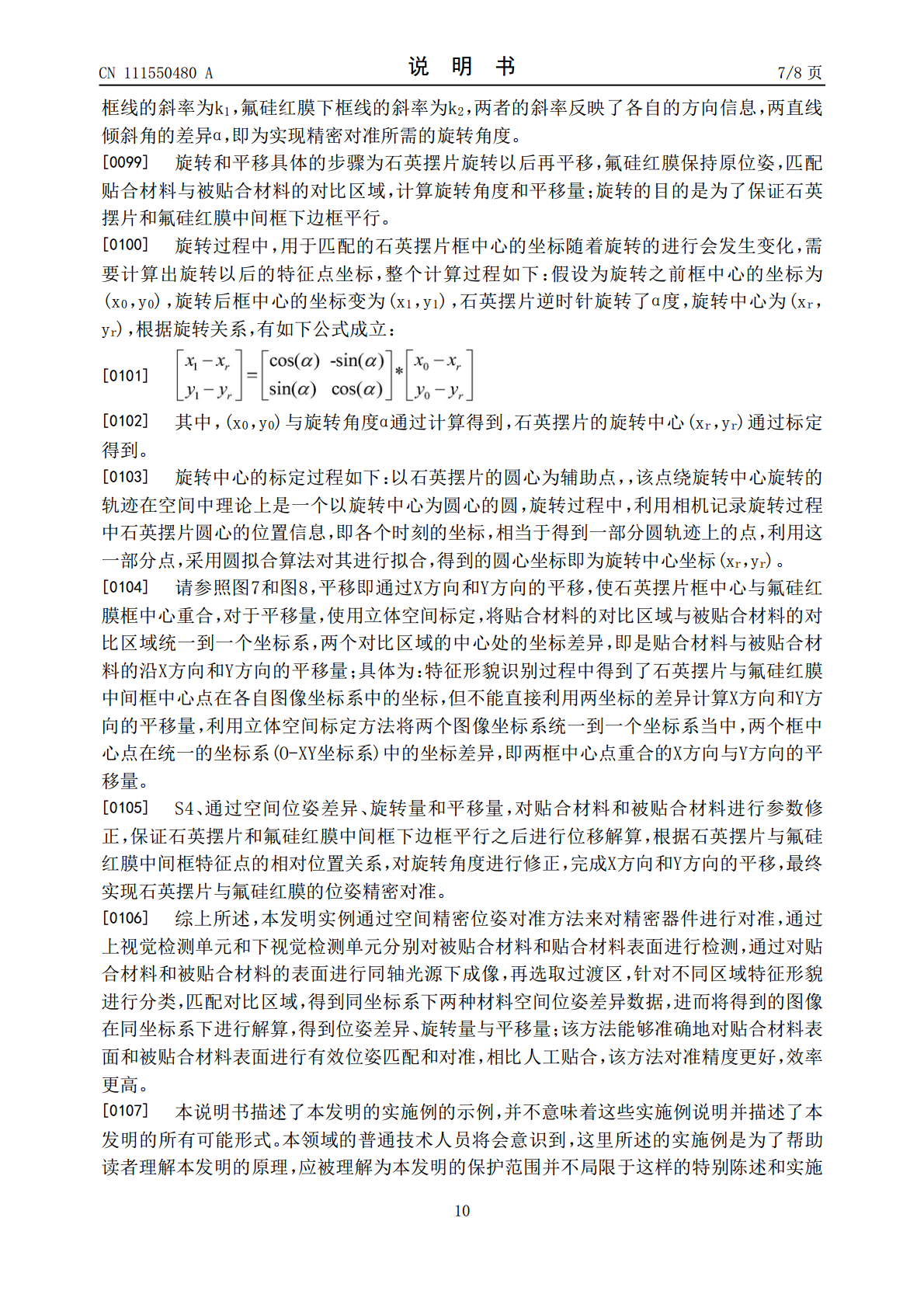
本发明公开了一种空间精密位姿对准方法,将所识别的贴合材料与被贴材料的特征形貌进行空间上的位姿匹配,具体为根据同轴光源下贴合材料与被贴材料的图像光学成像机理得到边界成像过渡区,然后选取过渡区合适边界,识别亚像素级别的贴合材料与被贴合材料整体特征轮廓并划分对比区域,针对对比区域特征形貌进行分类,匹配贴合材料与被贴材料对比区域,得到同坐标系下两种材料空间位姿差异数据,即是两种材料在空间中XY方向的实际差值和在θ方向的旋转角度差值;该方法针对人工对准精度难以保证,导致贴合不准确的问题,其能够解决人工对准精度难以保
一种空间圆弧位姿的视觉检测方法.pdf
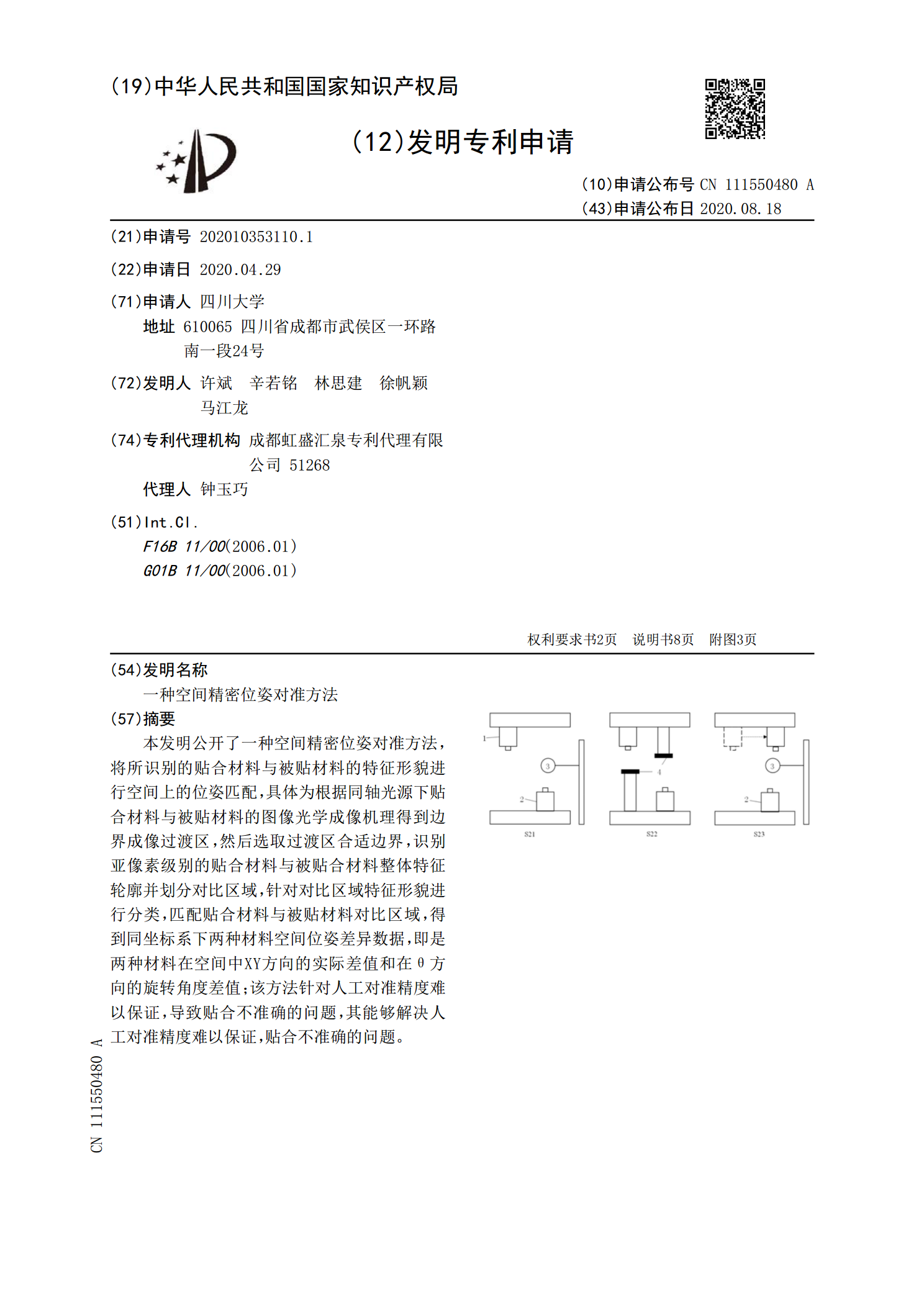
本发明涉及一种空间圆弧位姿的视觉检测方法,其式将空间圆弧A<base:Sub>rc</base:Sub>映射到虚拟摄像机{C<base:Sub>1</base:Sub>}的虚拟成像平面Γ<base:Sub>1</base:Sub>,构建空间圆弧A<base:Sub>rc</base:Sub>在实际摄像机坐标系{C}中的实际图像I<base:Sub>ma</base:Sub>与虚拟摄像机{C<base:Sub>1</base:Sub>}中所映射的虚拟图像I<base:Sub>ma</base:Sub>之间的
一种空间非合作目标精确位姿测量方法.pdf
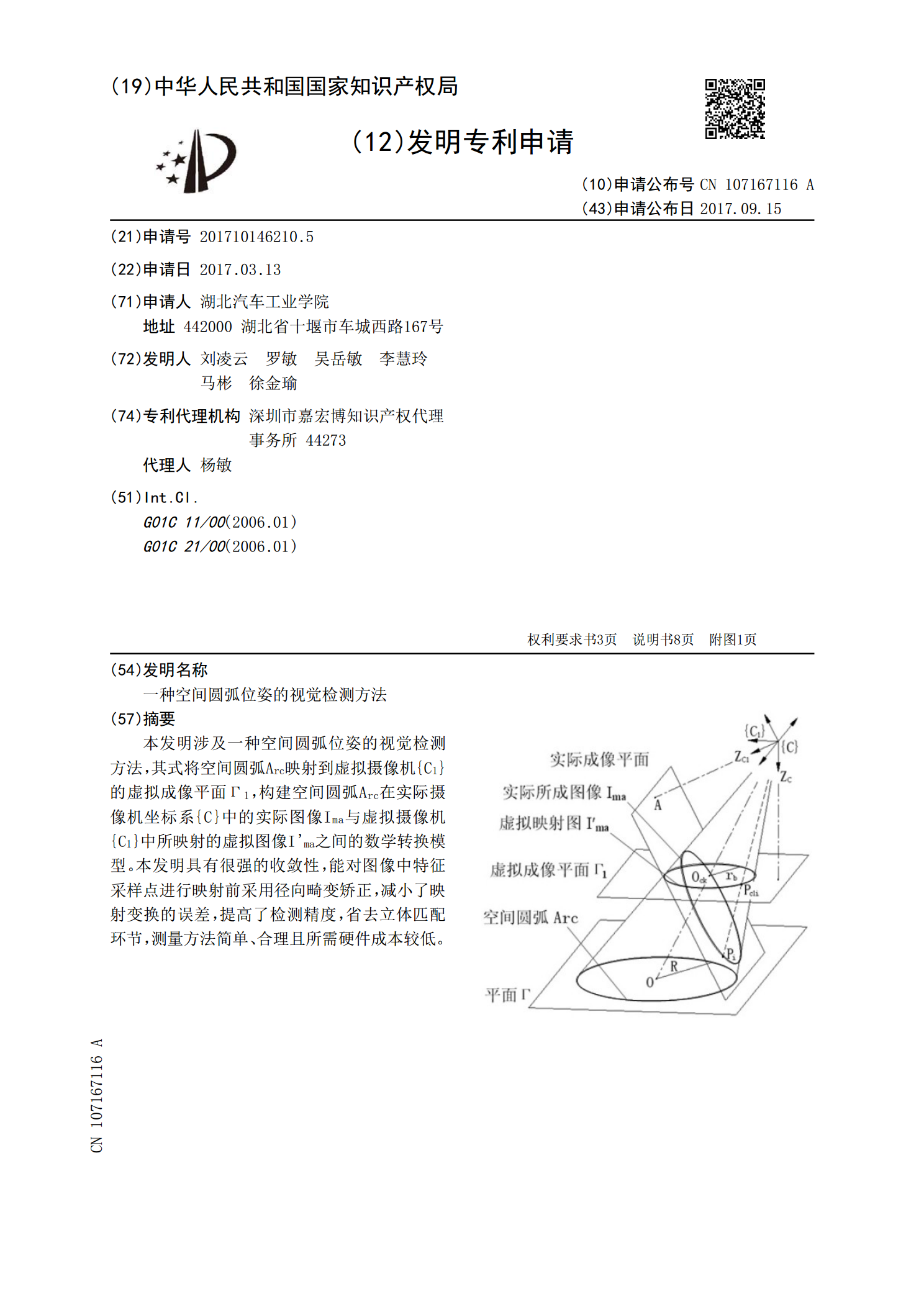
本发明涉及一种空间非合作目标精确位姿测量方法,其包括利用TOF相机和彩色相机实现空间非合作的精确相对位姿估计:利用TOF获取空间非合作目标的三维点云,根据ICP算法拼接得到空间非合作目标的完整三维点云;从空间非合作目标完整的三维点云中提取三维特征点、三维直线;利用彩色相机获取空间非合作目标的序列二维图像,从中提取出二维特征点、二维直线,根据2D‑3D特征点、直线对应关系求解空间非合作目标的相对位姿。本发明结合TOF相机、彩色相机的成像优势,能够精确求解空间非合作目标的位姿,可应用于深空探测和态势感知等空间
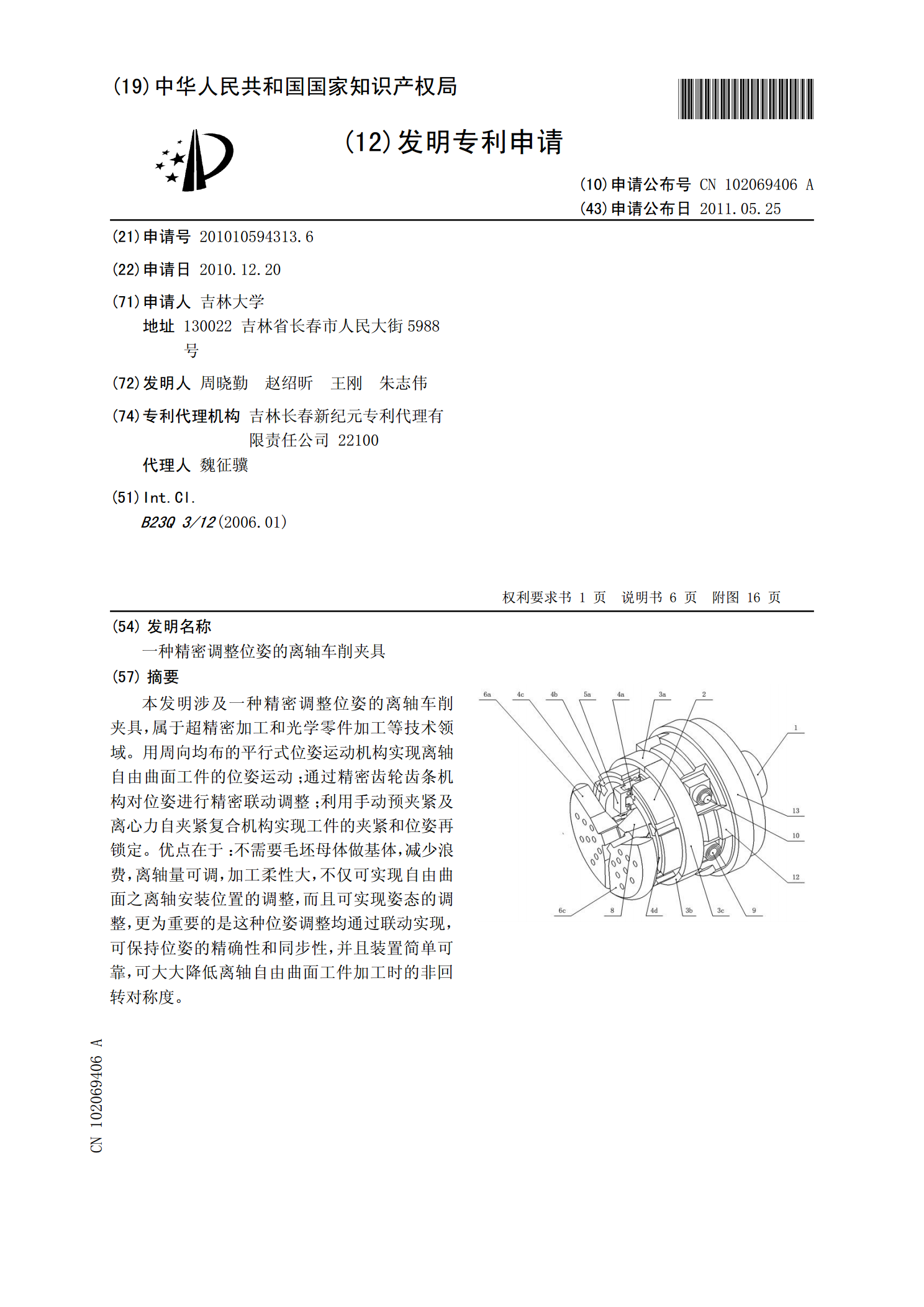
一种精密调整位姿的离轴车削夹具.pdf
本发明涉及一种精密调整位姿的离轴车削夹具,属于超精密加工和光学零件加工等技术领域。用周向均布的平行式位姿运动机构实现离轴自由曲面工件的位姿运动;通过精密齿轮齿条机构对位姿进行精密联动调整;利用手动预夹紧及离心力自夹紧复合机构实现工件的夹紧和位姿再锁定。优点在于:不需要毛坯母体做基体,减少浪费,离轴量可调,加工柔性大,不仅可实现自由曲面之离轴安装位置的调整,而且可实现姿态的调整,更为重要的是这种位姿调整均通过联动实现,可保持位姿的精确性和同步性,并且装置简单可靠,可大大降低离轴自由曲面工件加工时的非回转对称

一种基于集群弹性分散的空间目标位姿测量方法.pdf
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN116026342A(43)申请公布日2023.04.28(21)申请号202310321740.4(22)申请日2023.03.29(71)申请人中国科学院西安光学精密机械研究所地址710119陕西省西安市高新区新型工业园信息大道17号(72)发明人王锋路荣张高鹏陈卫宁曹剑中张海峰董森郭惠楠梅超(74)专利代理机构西安智邦专利商标代理有限公司61211专利代理师王少文(51)Int.Cl.G01C21/24(2006.01)G01C21/0