
一种空间非合作目标精确位姿测量方法.pdf

雨巷****莺莺

1/9
2/9
3/9

4/9
5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种空间非合作目标精确位姿测量方法.pdf
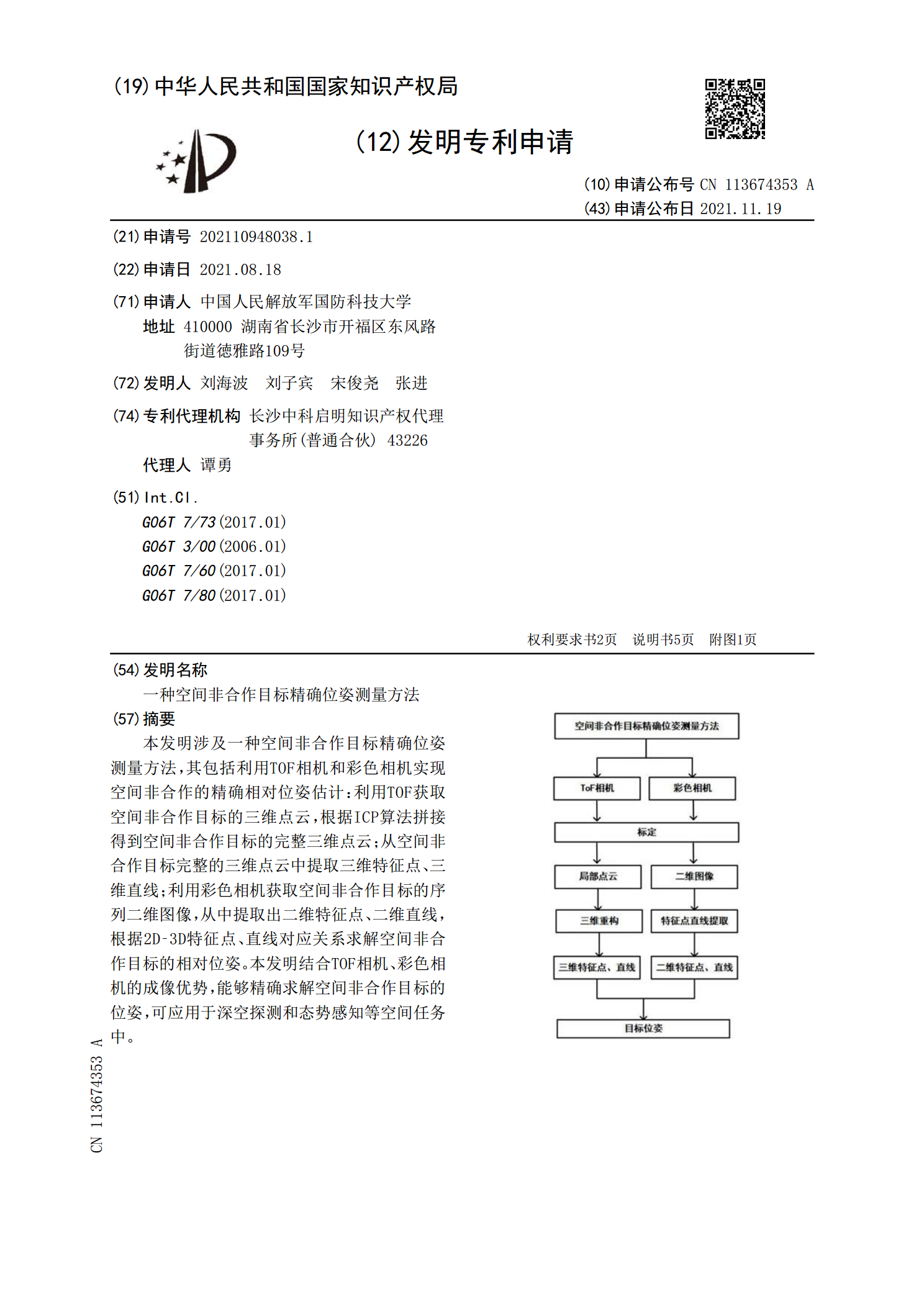
本发明涉及一种空间非合作目标精确位姿测量方法,其包括利用TOF相机和彩色相机实现空间非合作的精确相对位姿估计:利用TOF获取空间非合作目标的三维点云,根据ICP算法拼接得到空间非合作目标的完整三维点云;从空间非合作目标完整的三维点云中提取三维特征点、三维直线;利用彩色相机获取空间非合作目标的序列二维图像,从中提取出二维特征点、二维直线,根据2D‑3D特征点、直线对应关系求解空间非合作目标的相对位姿。本发明结合TOF相机、彩色相机的成像优势,能够精确求解空间非合作目标的位姿,可应用于深空探测和态势感知等空间

一种基于涡旋光的非合作目标转速和位姿测量方法.pdf
本发明涉及一种基于涡旋光的非合作目标转速和位姿测量方法,从旋转多普勒效应原理及散射点模型入手,先将目标上被光斑覆盖的散射点速度向椭圆切向投影,再向光束横截面投影,并将此投影速度除以光束的半径,这样便可求出涡旋光相位中的角向分量θ(t)对时间t的导数θ′(t),进而可求得基带回波信号的旋转多普勒频移;在此基础上,通过分析在偏心和倾斜同时存在情况下的旋转多普勒频移变化情况,得出了频移极值随相对空间位置参数的变化规律,进而可求得偏心和倾斜同时存在并且涡旋光光轴无偏转时的转速和偏心距。

空间非合作旋转目标的模型重建与位姿优化.docx
空间非合作旋转目标的模型重建与位姿优化Title:ModelReconstructionandPoseOptimizationforNon-cooperativeRotatingObjectsinSpaceAbstract:Modelreconstructionandposeoptimizationfornon-cooperativerotatingobjectsinspaceplayavitalroleinvariousapplications,includingroboticmanipulation,
空间非合作旋转目标的模型重建与位姿优化.pptx
添加副标题目录PART01PART02模型重建方法数据采集与处理模型重建精度评估模型重建实验验证PART03位姿优化方法优化算法选择与实现位姿优化结果评估位姿优化实验验证PART04集成方案设计集成实现过程集成效果评估集成实验验证PART05应用场景概述优势分析与其他方法的比较潜在应用领域拓展PART06研究结论总结研究不足与局限性未来研究方向与展望感谢您的观看

空间非合作旋转目标的模型重建与位姿优化.docx
空间非合作旋转目标的模型重建与位姿优化Abstract:Inrecentyears,theproblemofmodelreconstructionandposeoptimizationofnon-cooperativerotatingtargetsinspacehasattractedmuchattention.Thispaperaimstoproposeaframeworkforreconstructingthe3Dmodelofanon-cooperativerotatingtargetfromspa