
一种机电飞轮混合动力系统驱动控制方法.pdf

森林****来了

1/9
2/9
3/9

4/9
5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机电飞轮混合动力系统驱动控制方法.pdf
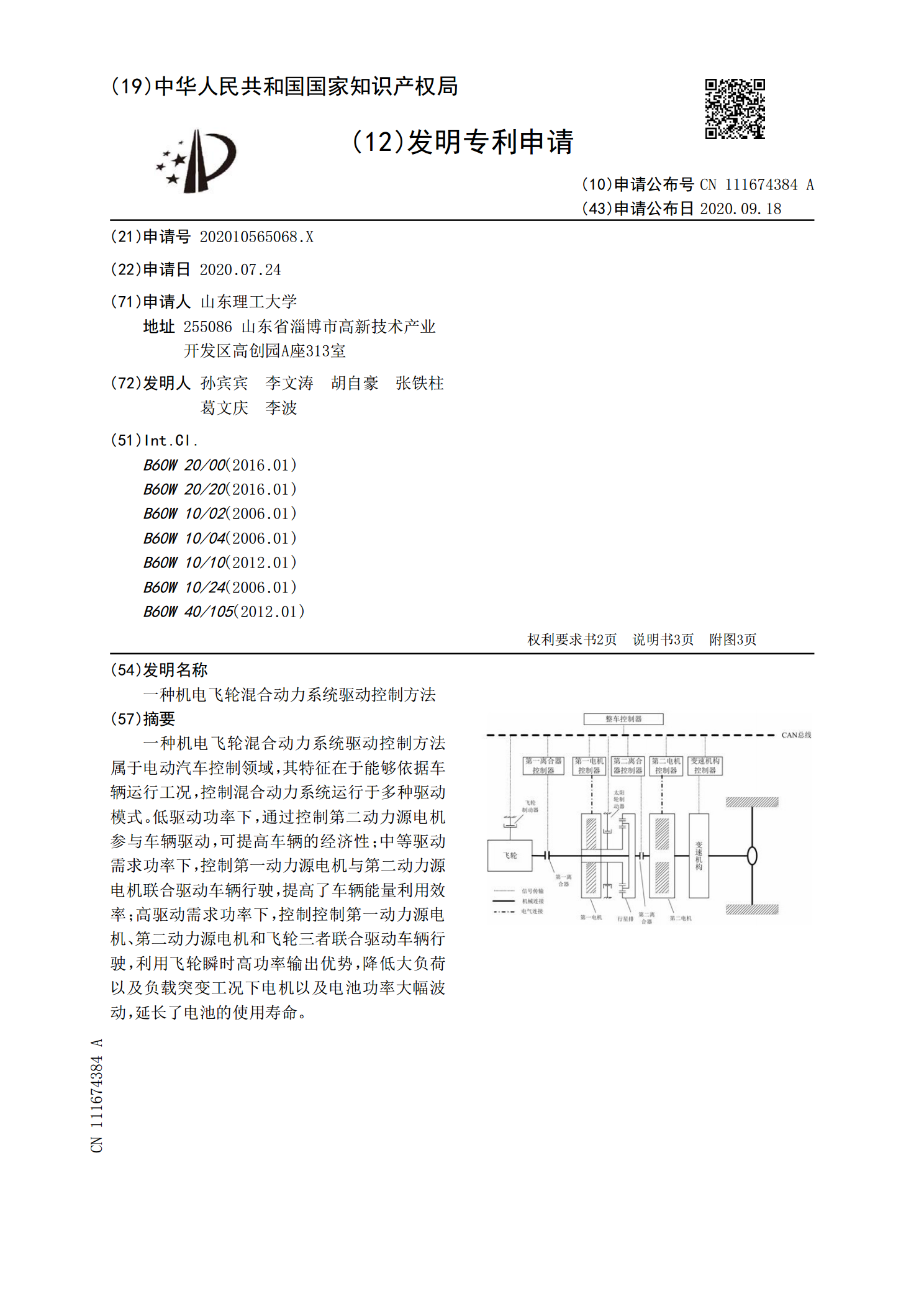
一种机电飞轮混合动力系统驱动控制方法属于电动汽车控制领域,其特征在于能够依据车辆运行工况,控制混合动力系统运行于多种驱动模式。低驱动功率下,通过控制第二动力源电机参与车辆驱动,可提高车辆的经济性;中等驱动需求功率下,控制第一动力源电机与第二动力源电机联合驱动车辆行驶,提高了车辆能量利用效率;高驱动需求功率下,控制控制第一动力源电机、第二动力源电机和飞轮三者联合驱动车辆行驶,利用飞轮瞬时高功率输出优势,降低大负荷以及负载突变工况下电机以及电池功率大幅波动,延长了电池的使用寿命。

一种机电飞轮混合动力系统制动控制方法.pdf
一种机电飞轮混合动力系统制动控制方法属于电动汽车控制领域,其特征在于能够依据车辆、电机、飞轮状态,控制混合动力系统运行于多种制动模式。在低制动需求功率下,控制第二动力源电机参与再生制动,增加了制动能量回收率;在中等制动需求功率下,控制第一动力源电机和第二动力源电机两者参与车辆的再生制动,提高了汽车行驶的经济性和汽车连续行驶里程;在高需求制动功率需求下,控制器控制第一动力源电机、第二动力源电机和飞轮联合参与车辆的再生制动,提高了电池的运行效率并且保证了飞轮的能量状态。
一种机电飞轮混合动力系统.pdf
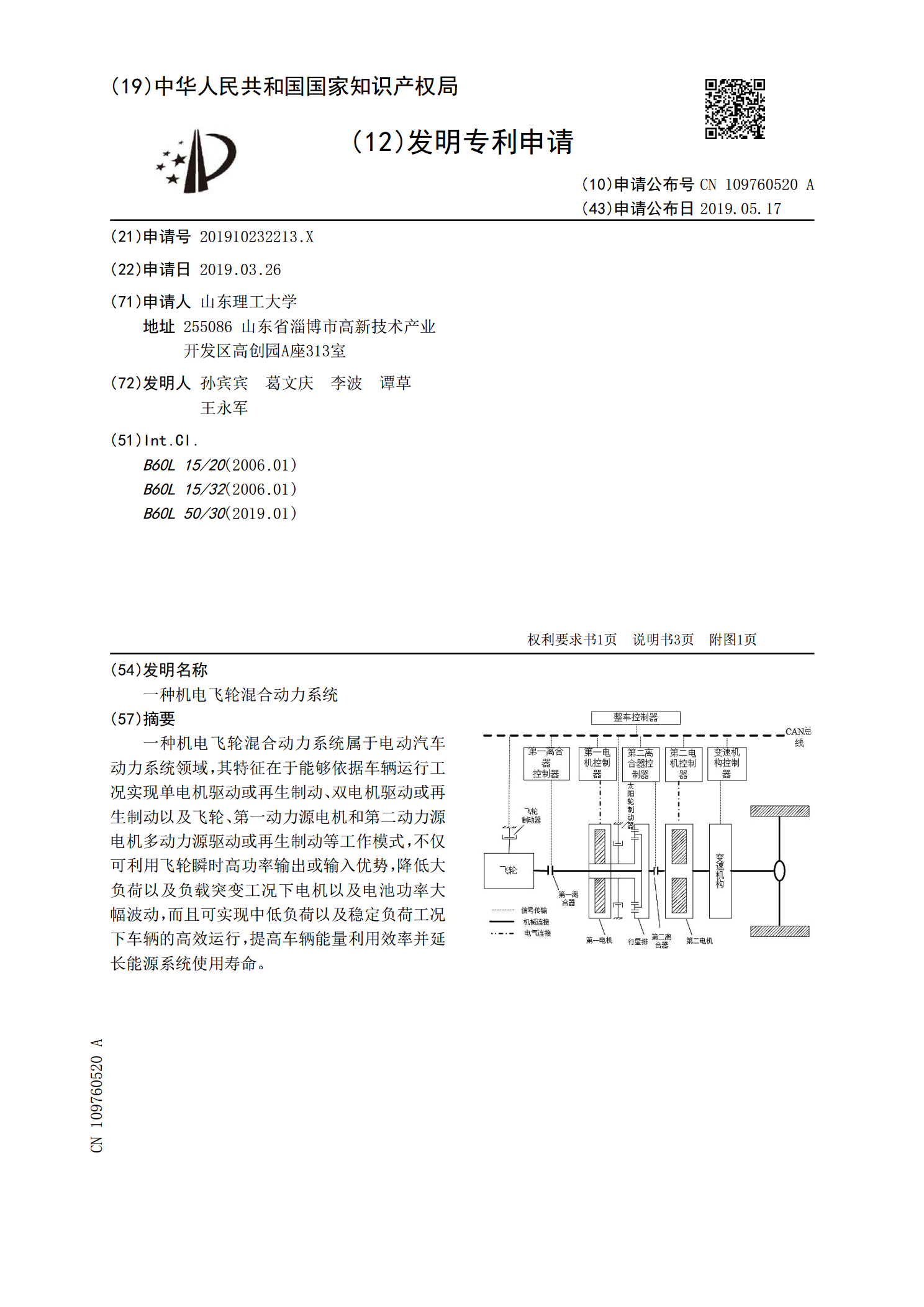
一种机电飞轮混合动力系统属于电动汽车动力系统领域,其特征在于能够依据车辆运行工况实现单电机驱动或再生制动、双电机驱动或再生制动以及飞轮、第一动力源电机和第二动力源电机多动力源驱动或再生制动等工作模式,不仅可利用飞轮瞬时高功率输出或输入优势,降低大负荷以及负载突变工况下电机以及电池功率大幅波动,而且可实现中低负荷以及稳定负荷工况下车辆的高效运行,提高车辆能量利用效率并延长能源系统使用寿命。
一种双电机单飞轮混合动力系统制动控制方法.pdf
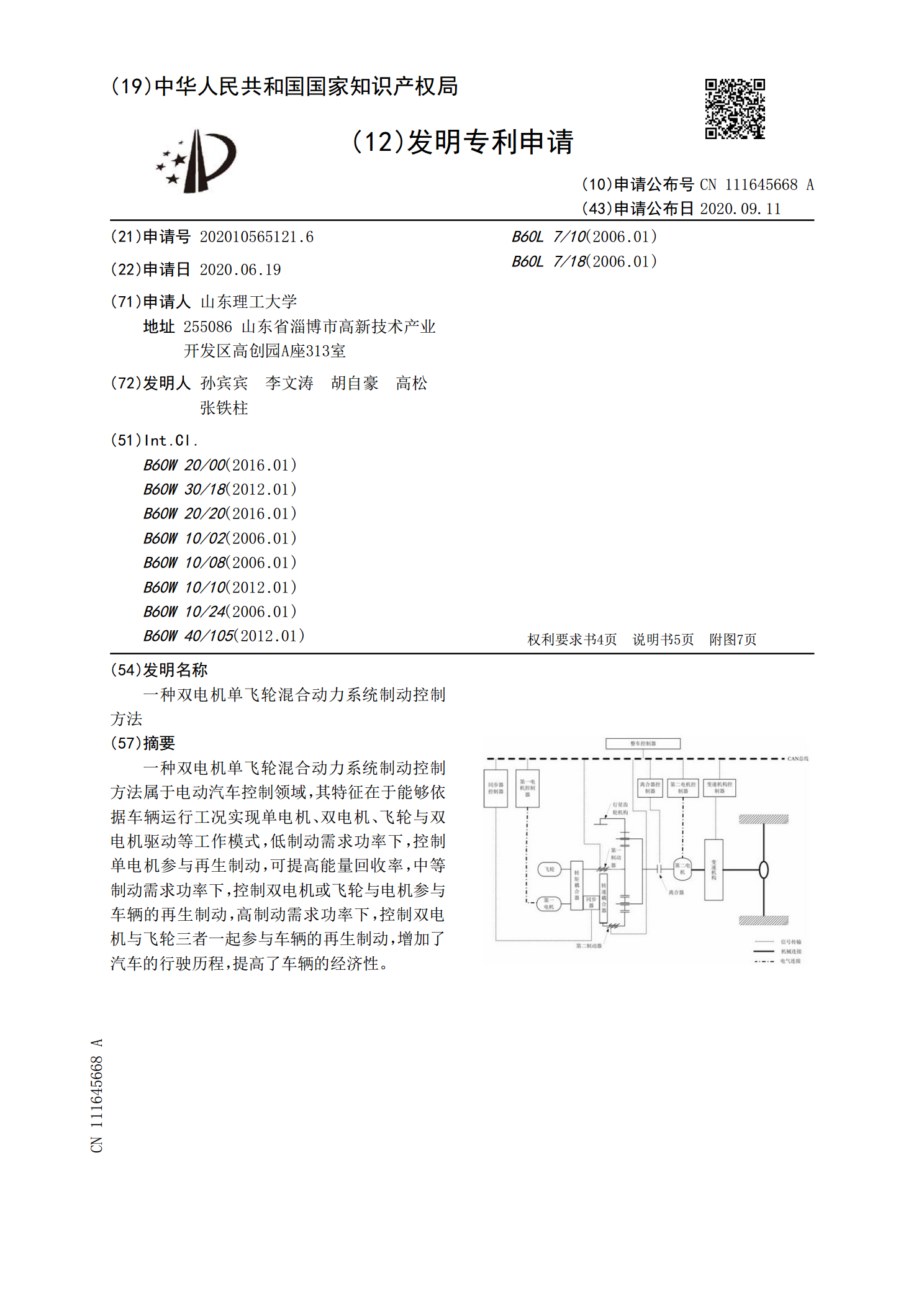
一种双电机单飞轮混合动力系统制动控制方法属于电动汽车控制领域,其特征在于能够依据车辆运行工况实现单电机、双电机、飞轮与双电机驱动等工作模式,低制动需求功率下,控制单电机参与再生制动,可提高能量回收率,中等制动需求功率下,控制双电机或飞轮与电机参与车辆的再生制动,高制动需求功率下,控制双电机与飞轮三者一起参与车辆的再生制动,增加了汽车的行驶历程,提高了车辆的经济性。

一种油‑电‑飞轮混合动力驱动系统及驱动方法.pdf
本发明公开了一种油‑电‑飞轮混合动力驱动系统及驱动方法;该驱动系统包括发动机,第一离合器,第一锁定器,行星齿轮机构,所述第一离合器安装在发动机和行星齿轮机构之间,所述第一锁定器安装在发动机和行星齿轮机构之间,第二锁定器,电动机/发电机,所述第二锁定器安装在电动机/发电机和行星齿轮机构之间,电能储存装置,充电装置,飞轮制动器,飞轮,无级变速装置,第二离合器,所诉第二离合器安装在无级变速装置和行星齿轮机构之间,末端齿轮箱,驱动轮/螺旋桨。本发明解决传统旋翼飞机/电动车辆/螺旋桨推进船舰艇的动力源单一、耗油量大