
一种全向移动平台车及其驱动方法.pdf

一只****生物

1/10
2/10

3/10

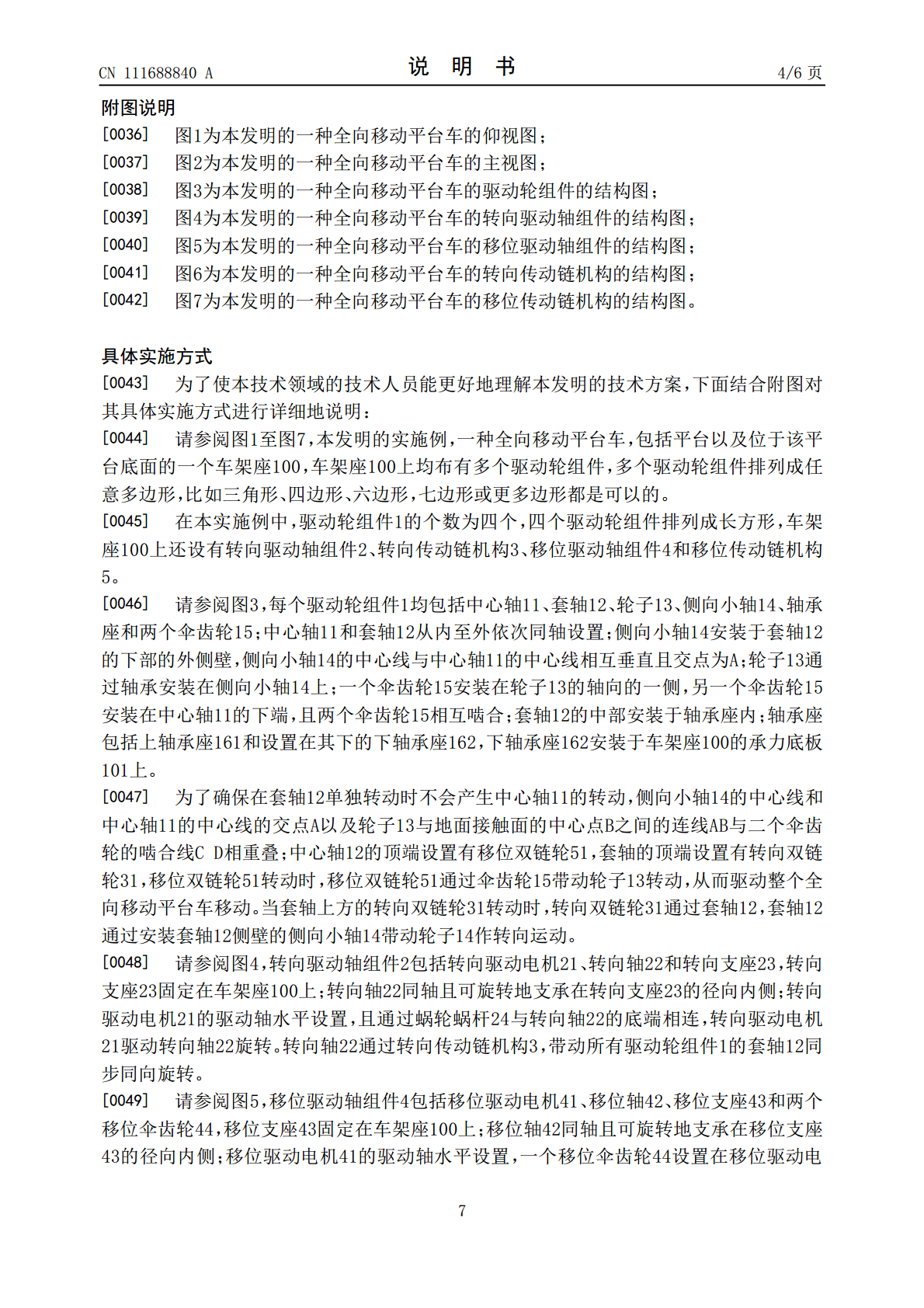
4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种全向移动平台车及其驱动方法.pdf
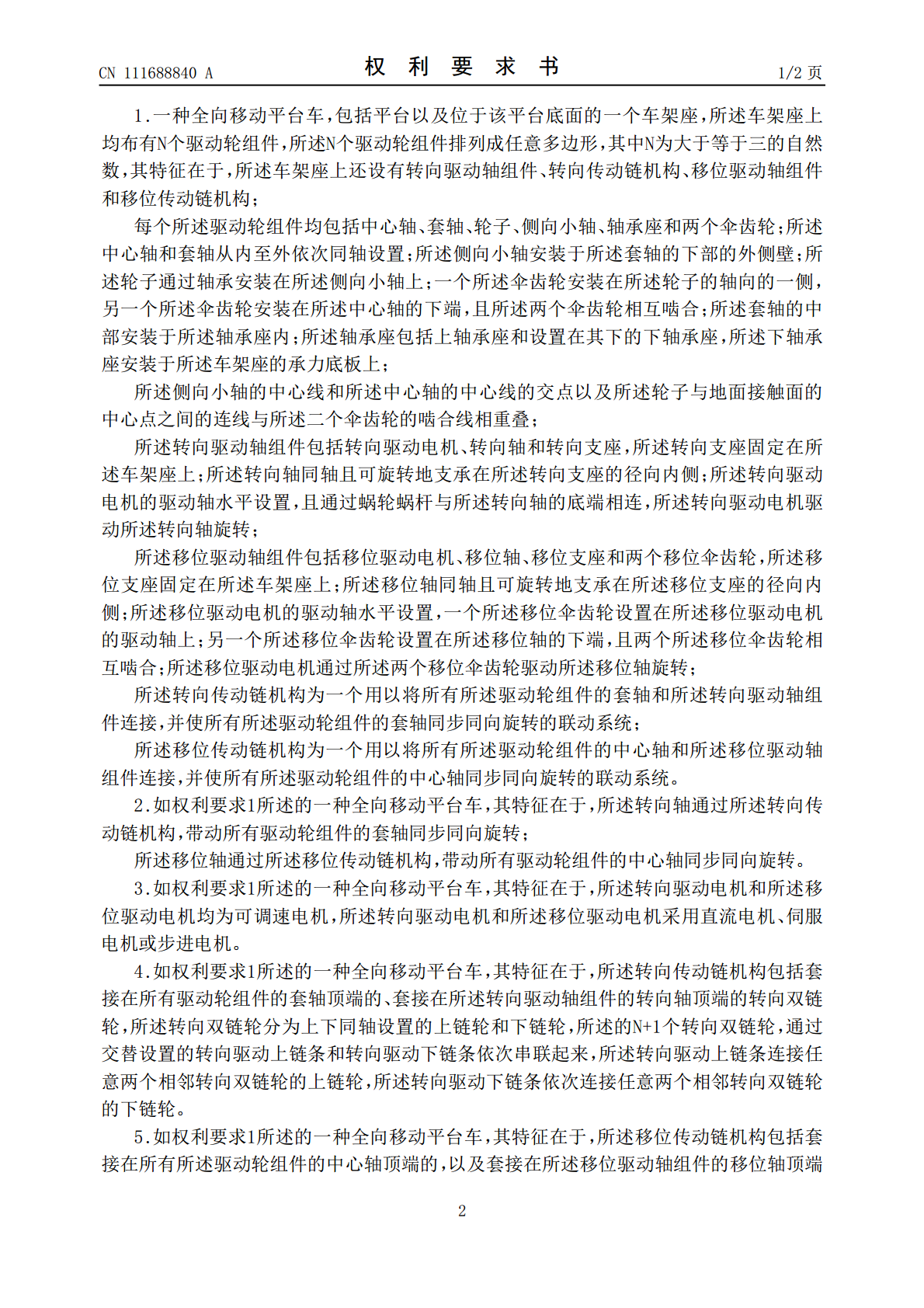
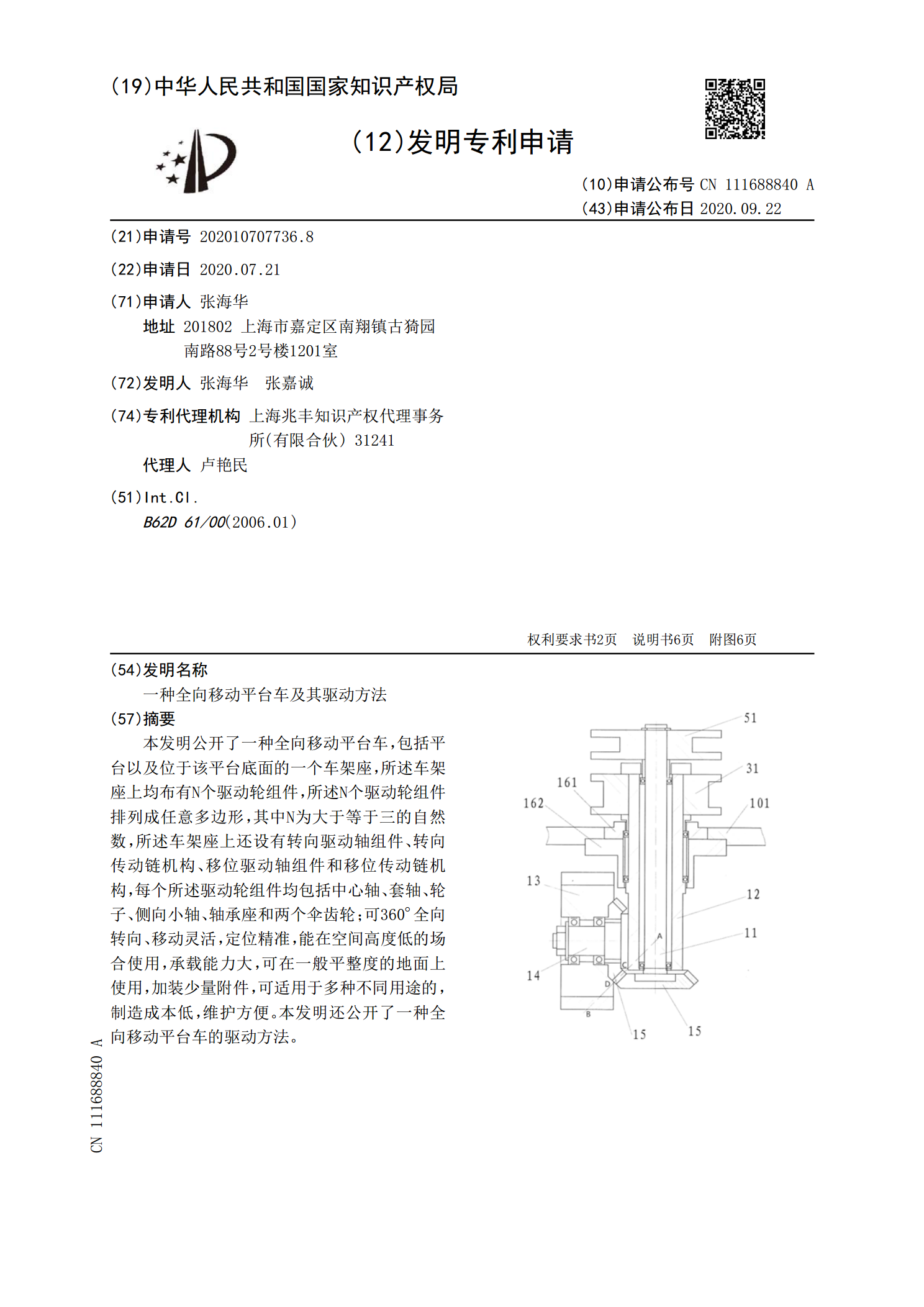
本发明公开了一种全向移动平台车,包括平台以及位于该平台底面的一个车架座,所述车架座上均布有N个驱动轮组件,所述N个驱动轮组件排列成任意多边形,其中N为大于等于三的自然数,所述车架座上还设有转向驱动轴组件、转向传动链机构、移位驱动轴组件和移位传动链机构,每个所述驱动轮组件均包括中心轴、套轴、轮子、侧向小轴、轴承座和两个伞齿轮;可360°全向转向、移动灵活,定位精准,能在空间高度低的场合使用,承载能力大,可在一般平整度的地面上使用,加装少量附件,可适用于多种不同用途的,制造成本低,维护方便。本发明还公开了一种

一种全向移动平台车及其驱动方法.pdf
本发明公开了一种全向移动平台车,包括平台,平台的底面上N个驱动轮组件,N个驱动轮组件排列成任意多边形,其中N为大于等于3的自然数,驱动轮组件包括:套轴部件、中心轴和轮轴部件,套轴部件包括与平台底面固定的支座,同轴且可旋转地支承在支座径向内侧的套轴,以及同轴固定在套轴底端的叉座;中心轴同轴且可旋转地支承在套轴的径向内侧;轮轴部件位于叉座内,轮轴部件上装有驱动轮,轮轴部件与中心轴的底端相交啮合;全向平台车的底面上还设有转向驱动组件,转向传动机构、移位驱动组件和移位传动机构;转向传动机构为一个用以将所有的套轴和
一种视觉引导的全向移动双臂机器人及其全向移动方法.pdf
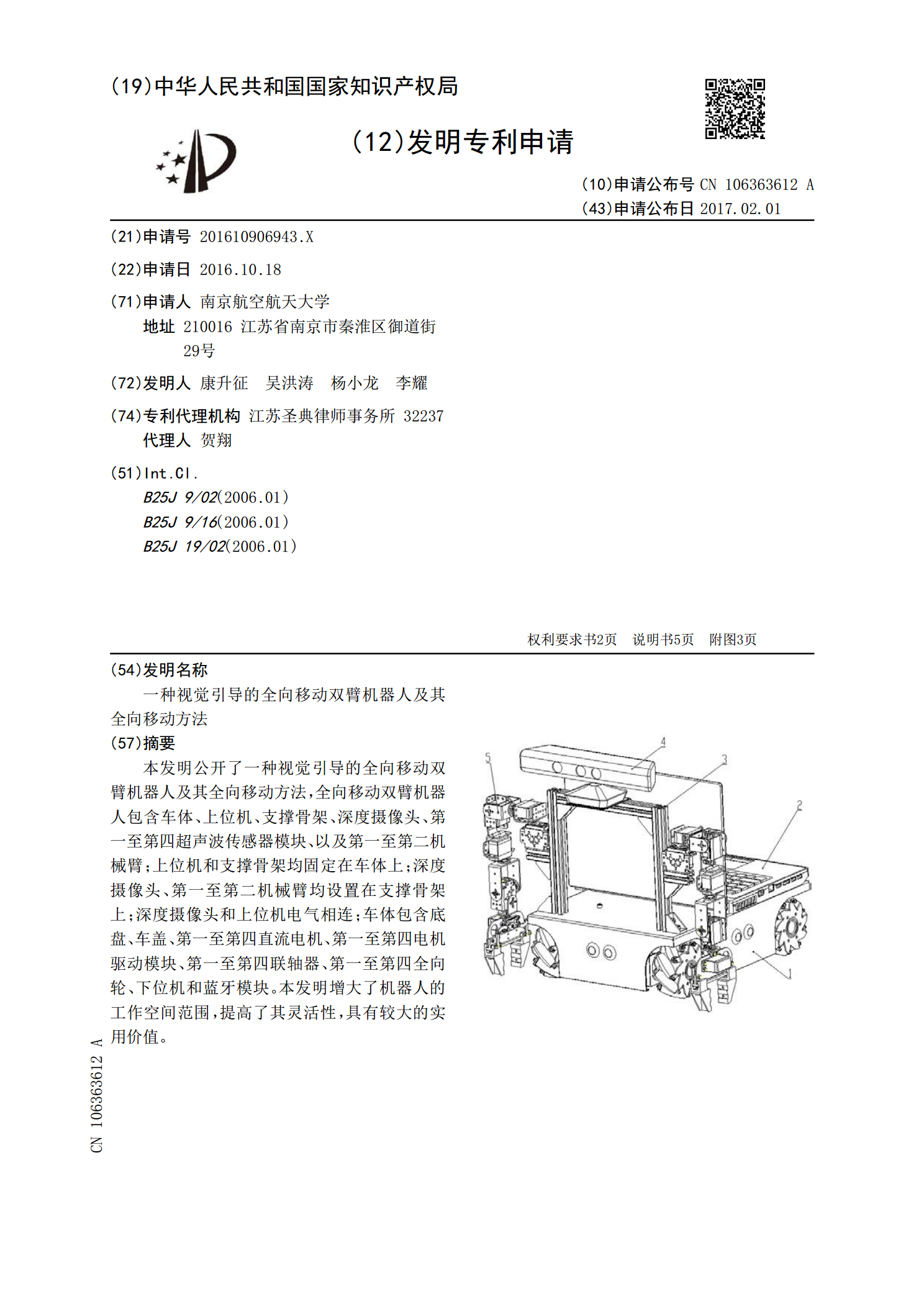
本发明公开了一种视觉引导的全向移动双臂机器人及其全向移动方法,全向移动双臂机器人包含车体、上位机、支撑骨架、深度摄像头、第一至第四超声波传感器模块、以及第一至第二机械臂;上位机和支撑骨架均固定在车体上;深度摄像头、第一至第二机械臂均设置在支撑骨架上;深度摄像头和上位机电气相连;车体包含底盘、车盖、第一至第四直流电机、第一至第四电机驱动模块、第一至第四联轴器、第一至第四全向轮、下位机和蓝牙模块。本发明增大了机器人的工作空间范围,提高了其灵活性,具有较大的实用价值。
单电机驱动的两栖全向移动螺纹推进底盘及其驱动方法.pdf
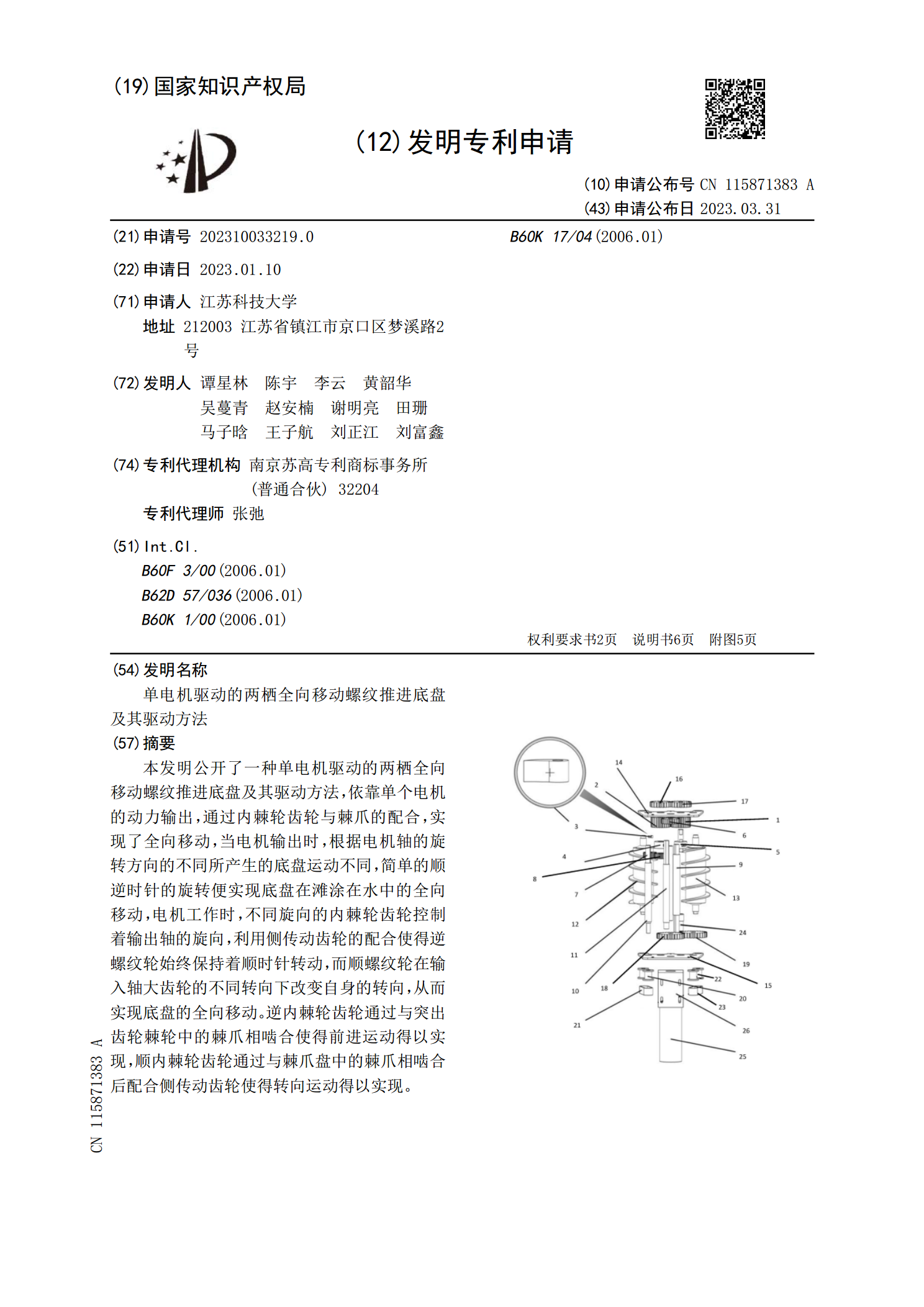
本发明公开了一种单电机驱动的两栖全向移动螺纹推进底盘及其驱动方法,依靠单个电机的动力输出,通过内棘轮齿轮与棘爪的配合,实现了全向移动,当电机输出时,根据电机轴的旋转方向的不同所产生的底盘运动不同,简单的顺逆时针的旋转便实现底盘在滩涂在水中的全向移动,电机工作时,不同旋向的内棘轮齿轮控制着输出轴的旋向,利用侧传动齿轮的配合使得逆螺纹轮始终保持着顺时针转动,而顺螺纹轮在输入轴大齿轮的不同转向下改变自身的转向,从而实现底盘的全向移动。逆内棘轮齿轮通过与突出齿轮棘轮中的棘爪相啮合使得前进运动得以实现,顺内棘轮齿轮

可全向移动的升降平台车.pdf
本发明公开可全向移动的升降平台车,包括底盘、设于底盘上的升降平台,所述底盘一端两侧对称设有传动轮、另一端对称设有万向轮,所述底盘与升降平台两侧之间设有升降组件,所述升降组件上设有滚珠丝杆,所述滚珠丝杆的一端固定在升降平台内、其接有升降摇杆;所述升降组件上还设有链轮、且所有链轮呈Z字型结构分布,固定在升降平台上的链轮连接有若干个变速齿轮,所述变速齿轮通过传动齿轮连接有进退摇杆。本升降装置灵活快捷调节高度和直线上的移动,省时省力且调节方便快捷,应用领域广,同时升降装置可折叠压缩,方便搬运与存放,工作效率高,实