
一种夹取物品的方法及装置.pdf

明钰****甜甜

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种夹取物品的方法及装置.pdf
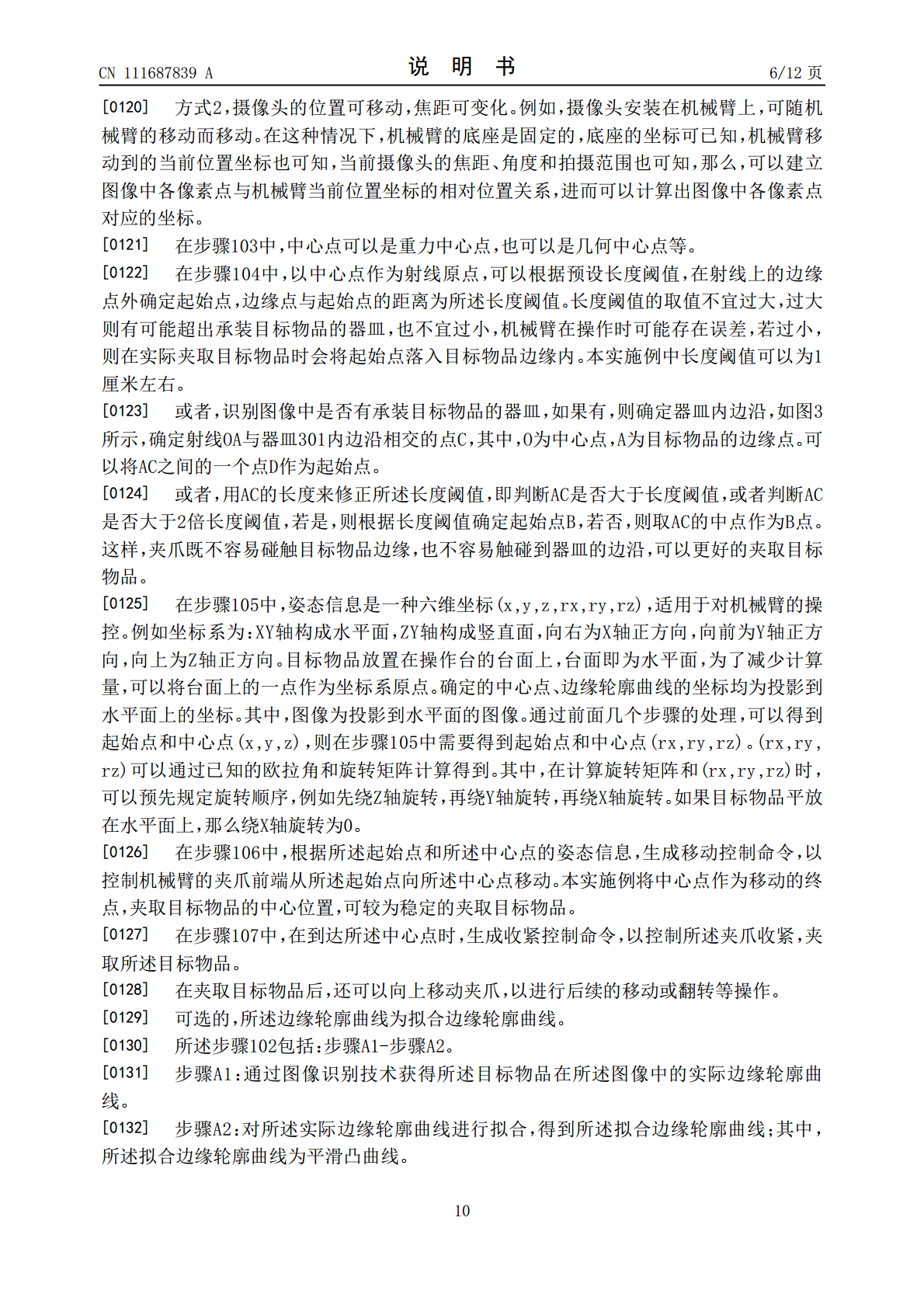
本发明公开了一种夹取物品的方法及装置,用以实现更准确更稳定的夹取物品。所述方法,包括:获取包含目标物品的图像;通过对所述图像的解析,确定所述目标物品的边缘轮廓曲线;根据所述边缘轮廓曲线确定所述目标物品的中心点;在所述中心点与所述边缘轮廓曲线上一边缘点的射线上确定起始点,其中,所述中心点与所述起始点的距离大于所述中心点与所述边缘点的距离;确定所述起始点和所述中心点的姿态信息;根据所述起始点和所述中心点的姿态信息,控制机械臂的夹爪前端从所述起始点向所述中心点移动;在到达所述中心点时,控制所述夹爪收紧,以夹取所
一种超高纯铝铸造用夹取装置及其夹取方法.pdf
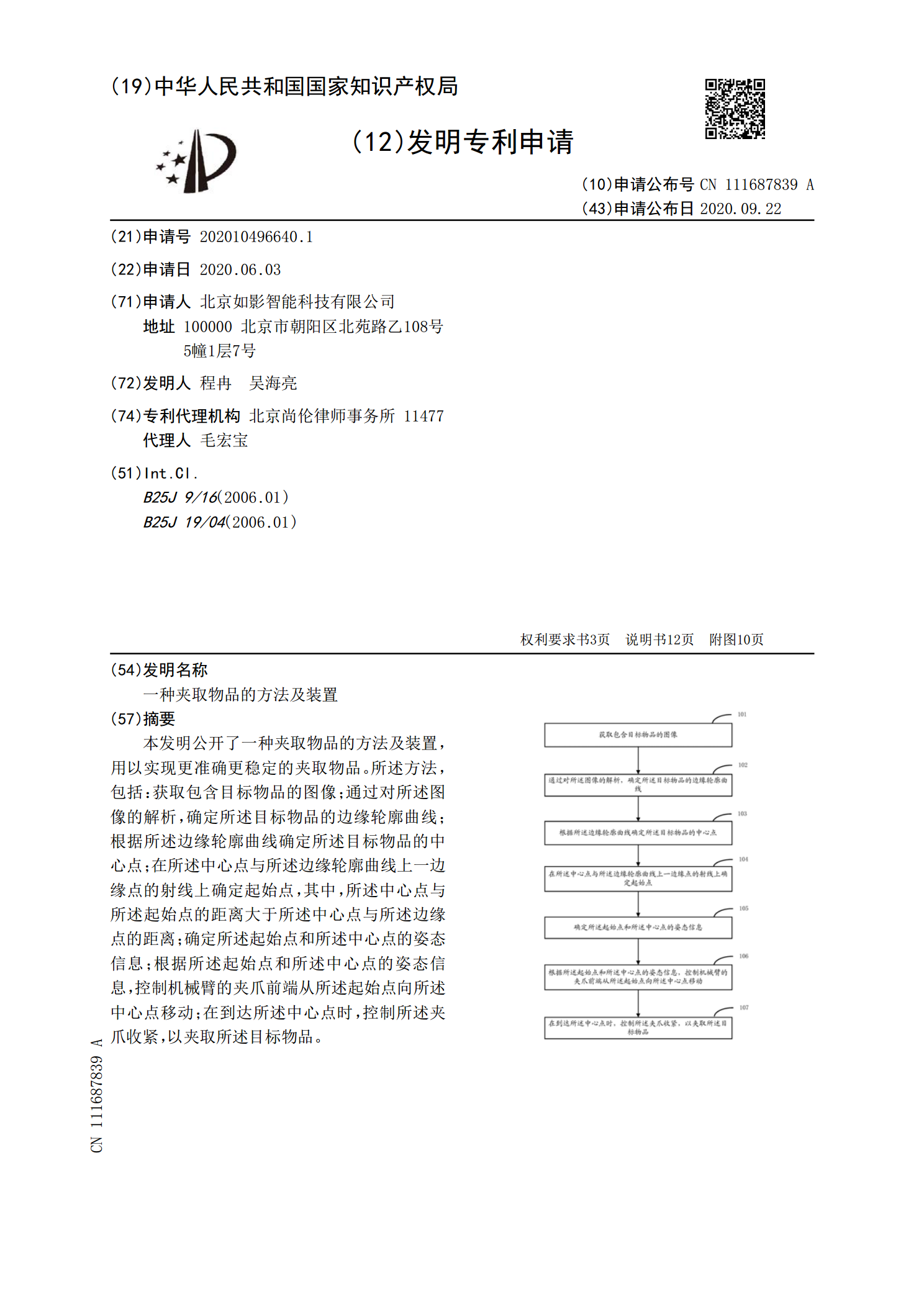
本发明提供一种超高纯铝铸造用夹取装置及其夹取方法,所述夹取装置包括依次连接的支撑单元、拉伸单元和夹取单元;所述夹取单元包括依次活动连接的伸缩组件、传动组件和夹取组件;所述伸缩组件采用压缩气缸进行驱动;所述夹取组件采用硬质陶瓷材料制备而成。所述夹取方法包括以下步骤:(1)将夹取装置安放于水平地面,启动拉伸单元,将夹取单元调整至目标高度;(2)启动夹取单元,伸缩组件依次带动传动组件和夹取组件对超高纯铝进行夹取操作。本发明提供的夹取装置避免了铝与夹取装置上的其他金属之间发生化学反应,防止了超高纯铝的污染,同时保
一种夹取装置.pdf
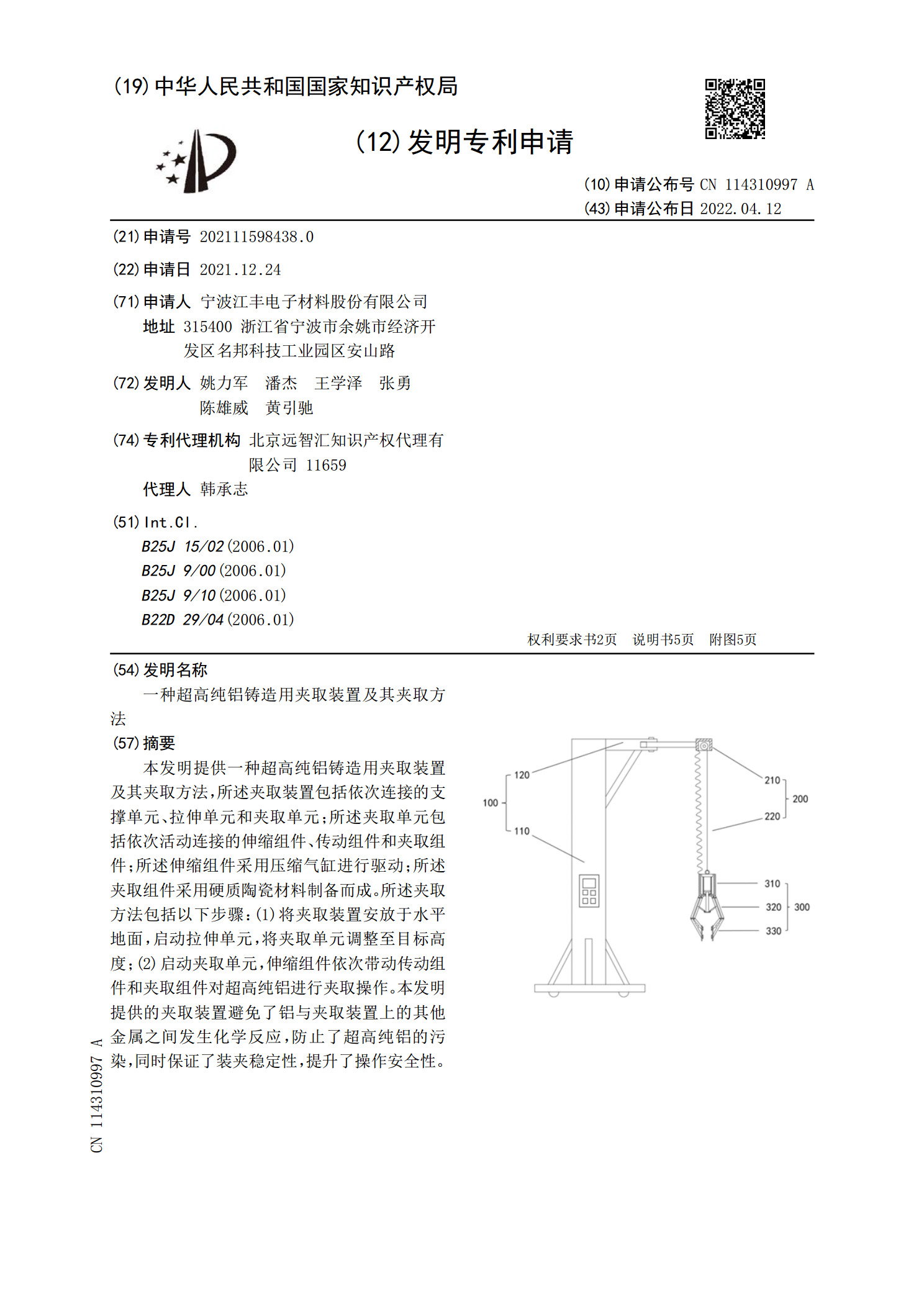
本发明提供一种夹取装置,包括机架、移动机构、夹取机构、升降机构和推倒机构,所述机架包括底板、支撑柱和横梁,所述底板设有两块,在两块底板之间形成工作区间,所述支撑柱设置在底板的两端,在两块底板的支撑柱之间设有横梁;所述夹取机构包括旋转组件、第一夹爪组件、第二夹爪组件、夹取横梁和夹持挡块,所述旋转组件设置在升降滑块上,所述第一夹爪组件设置在一底板上的旋转组件上,第二夹爪组件设置在另一底板上的旋转组件上,在第一夹爪组件和第二夹爪组件之间设有夹取横梁,在第一夹爪组件和第二夹爪组件之间的夹取横梁上设有夹持挡块;上述
物品夹取方法及机器人.pdf
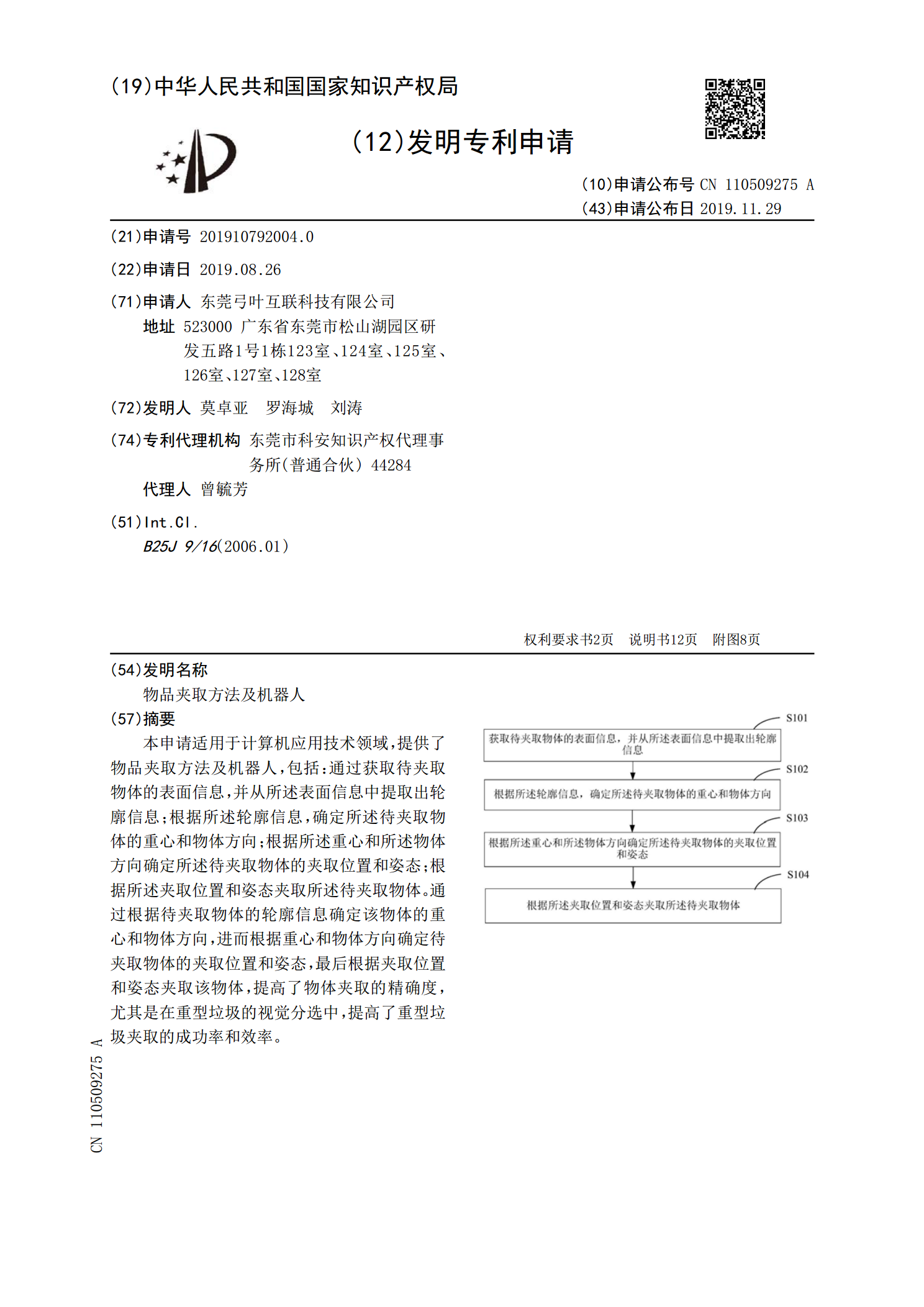
本申请适用于计算机应用技术领域,提供了物品夹取方法及机器人,包括:通过获取待夹取物体的表面信息,并从所述表面信息中提取出轮廓信息;根据所述轮廓信息,确定所述待夹取物体的重心和物体方向;根据所述重心和所述物体方向确定所述待夹取物体的夹取位置和姿态;根据所述夹取位置和姿态夹取所述待夹取物体。通过根据待夹取物体的轮廓信息确定该物体的重心和物体方向,进而根据重心和物体方向确定待夹取物体的夹取位置和姿态,最后根据夹取位置和姿态夹取该物体,提高了物体夹取的精确度,尤其是在重型垃圾的视觉分选中,提高了重型垃圾夹取的成功
一种陶瓷内部抛光夹取装置及方法.pdf
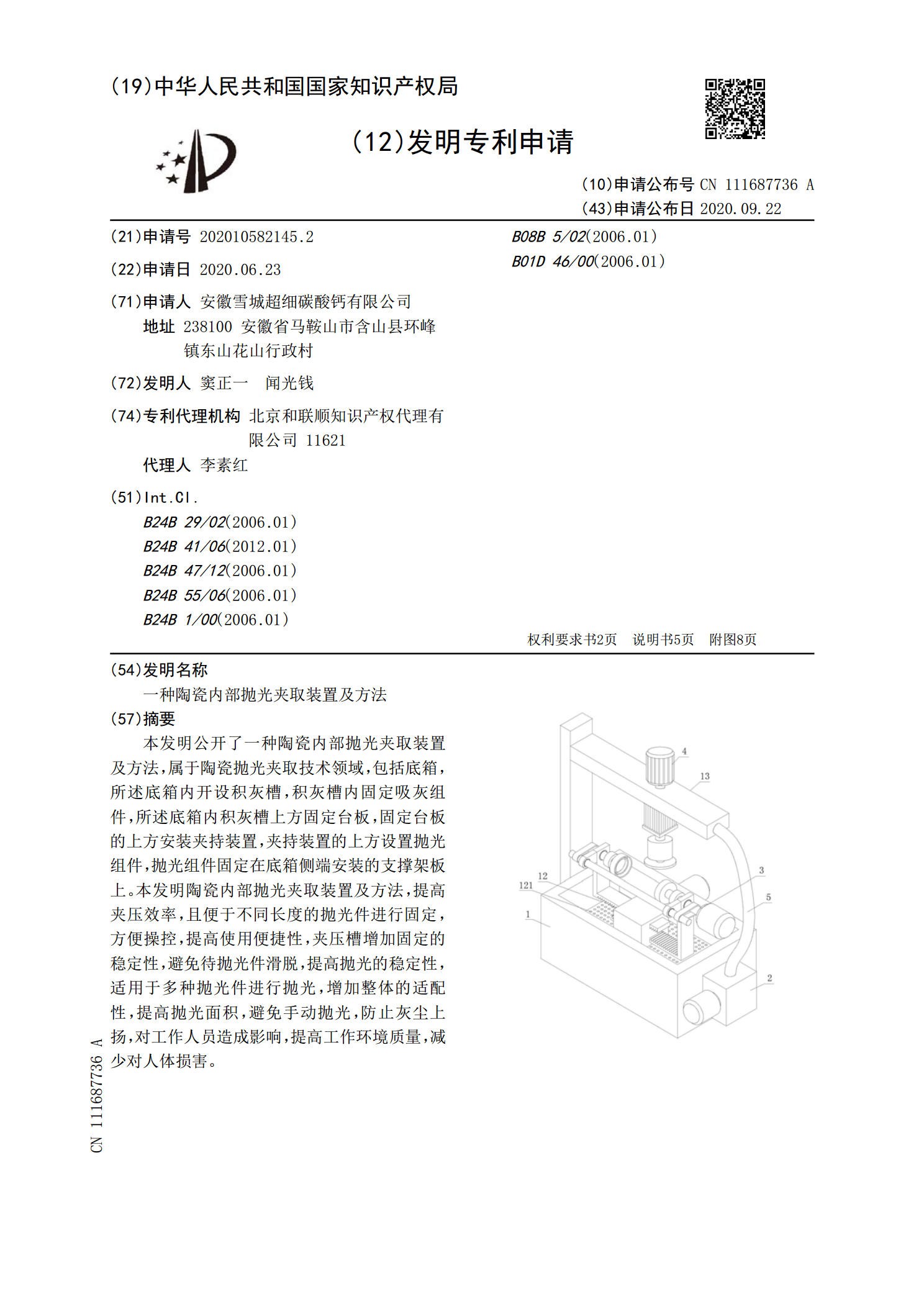
本发明公开了一种陶瓷内部抛光夹取装置及方法,属于陶瓷抛光夹取技术领域,包括底箱,所述底箱内开设积灰槽,积灰槽内固定吸灰组件,所述底箱内积灰槽上方固定台板,固定台板的上方安装夹持装置,夹持装置的上方设置抛光组件,抛光组件固定在底箱侧端安装的支撑架板上。本发明陶瓷内部抛光夹取装置及方法,提高夹压效率,且便于不同长度的抛光件进行固定,方便操控,提高使用便捷性,夹压槽增加固定的稳定性,避免待抛光件滑脱,提高抛光的稳定性,适用于多种抛光件进行抛光,增加整体的适配性,提高抛光面积,避免手动抛光,防止灰尘上扬,对工作人