
多视角下的目标轮廓定位定姿平差方法及系统.pdf

岚风****55


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多视角下的目标轮廓定位定姿平差方法及系统.pdf
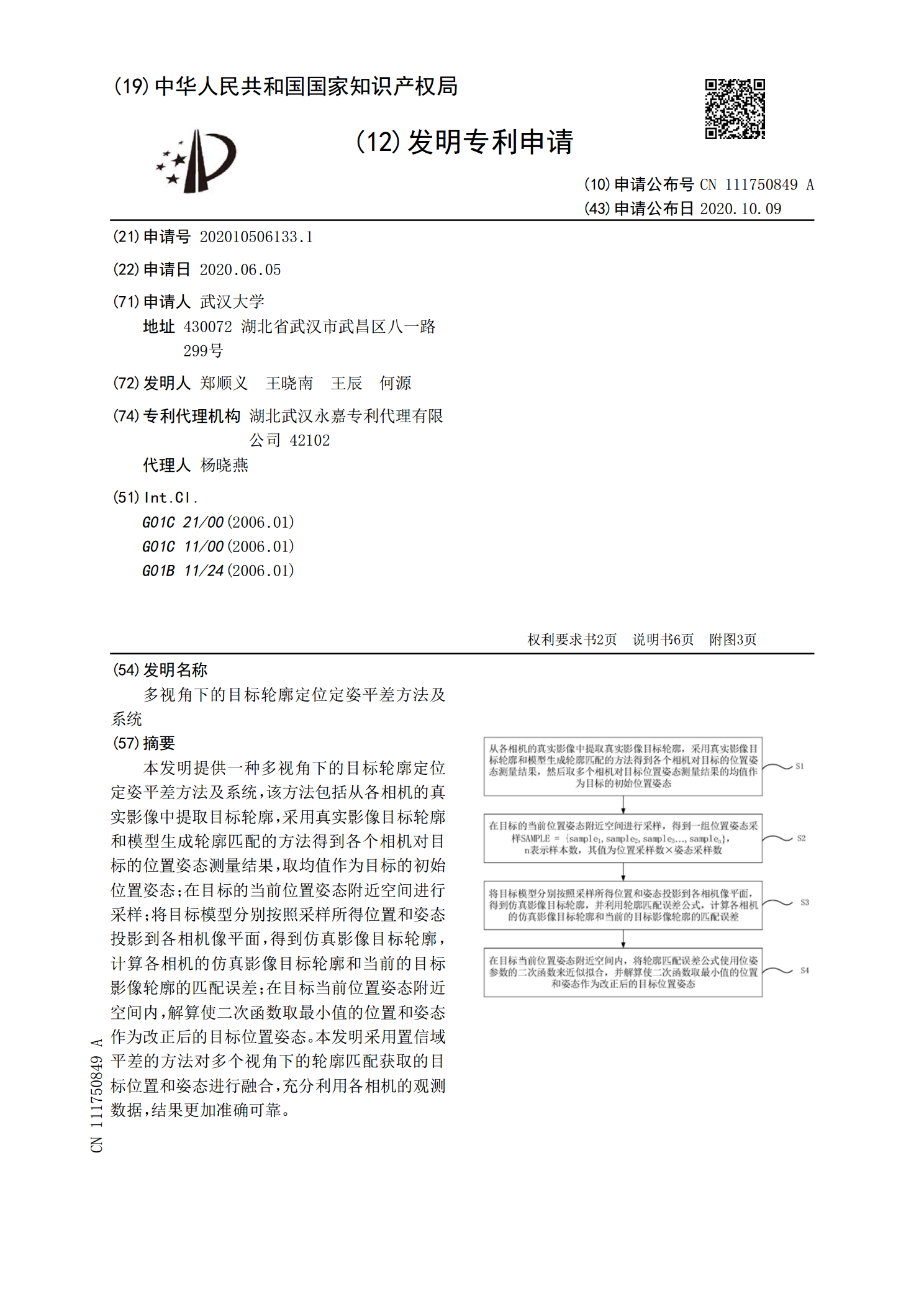
本发明提供一种多视角下的目标轮廓定位定姿平差方法及系统,该方法包括从各相机的真实影像中提取目标轮廓,采用真实影像目标轮廓和模型生成轮廓匹配的方法得到各个相机对目标的位置姿态测量结果,取均值作为目标的初始位置姿态;在目标的当前位置姿态附近空间进行采样;将目标模型分别按照采样所得位置和姿态投影到各相机像平面,得到仿真影像目标轮廓,计算各相机的仿真影像目标轮廓和当前的目标影像轮廓的匹配误差;在目标当前位置姿态附近空间内,解算使二次函数取最小值的位置和姿态作为改正后的目标位置姿态。本发明采用置信域平差的方法对多个

倾斜摄影定位定姿方法及系统和飞机定位定姿方法及系统.pdf
本发明涉及倾斜摄影定位定姿方法及系统和飞机定位定姿方法及系统,包括摄影设备以预设倾斜角度拍摄待定位定姿物体,获取包含待定位定姿物体的成像的图像;调整待定位定姿物体的三维模型的位姿参数,获取三维模型在图像对应的像幅内的投影的二维轮廓与成像的二维轮廓吻合时三维模型的位姿参数;将吻合时三维模型的位姿参数作为待定位定姿物体的位姿参数。本发明能高精度实现待定位定姿物体的位姿参数测量,并且仅需采集单幅图像,操作简单,能够有效实现待定位定姿物体只会至多出现在一个摄影设备的视场范围之内的位姿参数测量。

动态平差概括模型及形变与粗差的定位定值方法.docx
动态平差概括模型及形变与粗差的定位定值方法动态平差概括模型及形变与粗差的定位定值方法摘要:动态平差是一种基于时间序列观测数据的平差方法,广泛应用于测量工程和地理信息系统中。本文首先介绍了动态平差的基本原理和概括模型,然后详细讨论了形变与粗差的定位定值方法,包括参数判据和抗差估计等。通过实例分析,验证了定位定值方法的有效性和可靠性。最后,对未来的研究方向作出了展望。关键词:动态平差、概括模型、形变、粗差、定位、定值1.引言动态平差是一种基于时间序列观测数据的平差方法,可以用于测量工程和地理信息系统中的数据处
SEM图像轮廓定位方法、轮廓定位系统及计算机介质.pdf
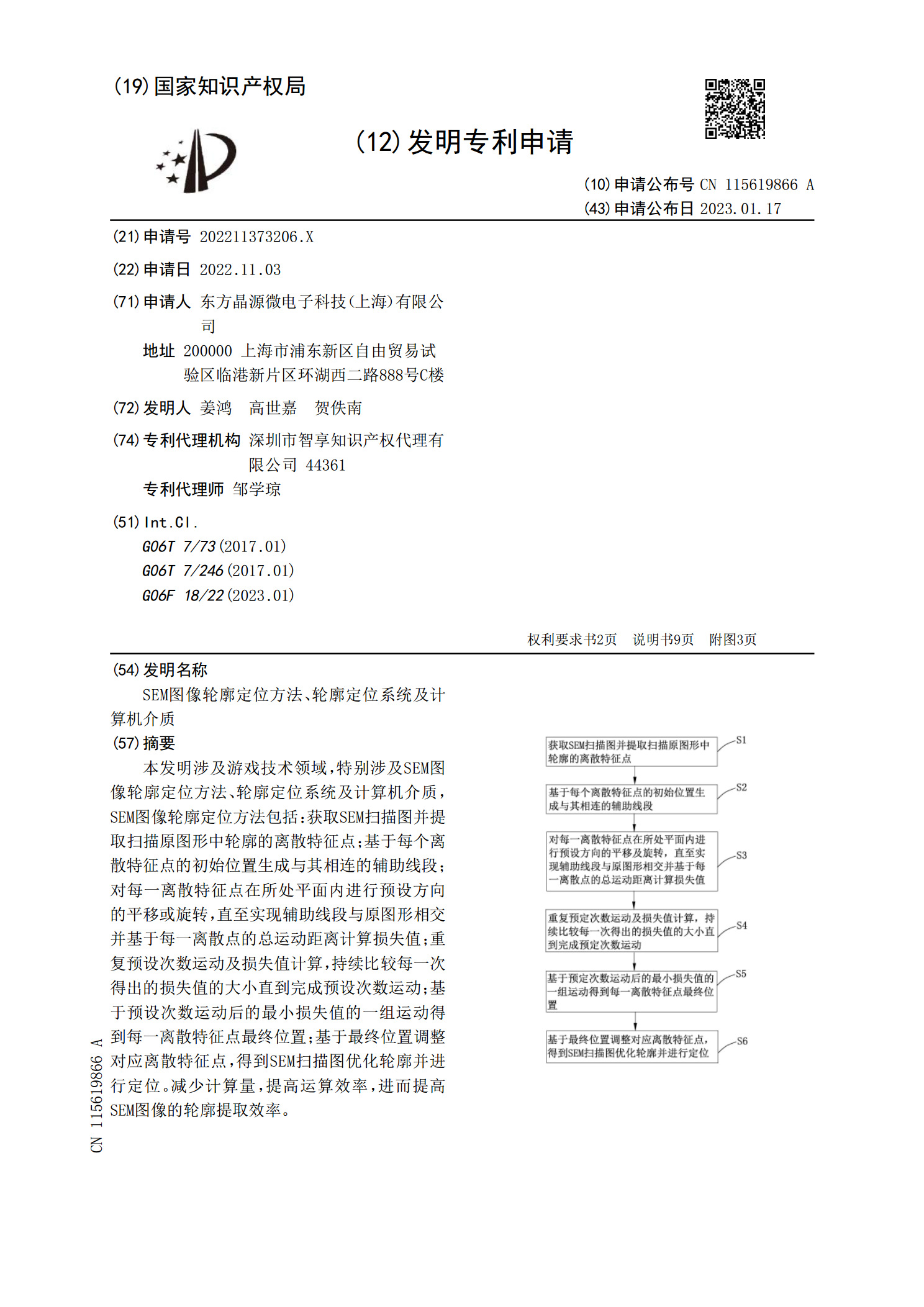
本发明涉及游戏技术领域,特别涉及SEM图像轮廓定位方法、轮廓定位系统及计算机介质,SEM图像轮廓定位方法包括:获取SEM扫描图并提取扫描原图形中轮廓的离散特征点;基于每个离散特征点的初始位置生成与其相连的辅助线段;对每一离散特征点在所处平面内进行预设方向的平移或旋转,直至实现辅助线段与原图形相交并基于每一离散点的总运动距离计算损失值;重复预设次数运动及损失值计算,持续比较每一次得出的损失值的大小直到完成预设次数运动;基于预设次数运动后的最小损失值的一组运动得到每一离散特征点最终位置;基于最终位置调整对应离

UWBINS紧组合的室内定位定姿方法.docx
UWBINS紧组合的室内定位定姿方法摘要:室内定位与定姿技术在日常生活中的应用越来越广泛。为了解决室内环境中的位置和方向信息获取问题,UWBINS(Ultra-widebandIndoorNavigationSystem)紧组合的室内定位定姿方法被提出。本文介绍了UWBINS系统的工作原理和关键技术,包括基站和标签的设计、UWB超宽频信号的传输和接收、多传感器融合系统等。通过对UWBINS系统的实验和测试结果进行分析,验证了该方法的高精度和可靠性。最后,本文还对UWBINS的局限性和未来发展方向进行了展望